文章目錄
前言
1 常見的抓手參數
2 參數說明
前言
Copter 支持許多不同的抓取器,這對送貨應用和落瓶很有用。
按照下面的鏈接(或側邊欄),根據你的設置了解配置信息。
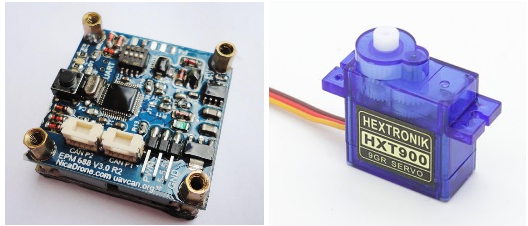
- Electro Permanent Magnet v3 (EPMv3)
- Electro Permanent Magnet v1 (EPM688)
- Servo Gripper
!Tip
可以使用?FS_OPTIONS(僅 ArduCopter)配置抓手,以便在失控保護情況下釋放。
1 常見的抓手參數
- GRIP_ENABLE:啟用抓取器的使用,并顯示以下參數;
- GRIP_TYPE:抓取器類型 – 0:無(在沒有隱藏參數的情況下禁用),1:伺服,2:EMP;
- GRIP_AUTOCLOSE:釋放后重新抓取有效載荷的時間(秒)(0 禁用)。用于送貨后的有效載荷更換;
- GRIP_GRAB:以 uS 為單位的 PWM 來抓取有效載荷;
- GRIP_NEUTRAL:以 uS 為單位的 PWM,既不抓取也不釋放有效載荷;
- GRIP_RELEASE:以 uS 為單位的 PWM 來釋放有效載荷;
- GRIP_REGRAB:(僅適用于 EMP)重新裝載的時間間隔,以秒為單位(0 禁用),以確保電磁保持沒有衰變;
- GRIP_CAN_ID:(僅限EMP) 參考https://docs.zubax.com/opengrab_epm_v3#UAVCAN_interface
通過設置?SERVOx_FUNCTION = "28"(Gripper),可以選擇與抓取器相連的自動駕駛儀輸出通道。
通過使用 MAVLink 命令MAV_CMD_DO_GRIPPER或將 RC 通道開關配置為?RCx_OPTION = "19(Gripper) "來控制夾持器。
2 參數說明
1.?GRIP_NEUTRAL:空檔 PWM
注意:此參數適用于高級用戶。
未抓取或釋放時發送到抓取器的 PWM 值(以微秒為單位)。
| Range | Units |
|---|---|
| 1000 to 2000 | PWM in microseconds |
2.?GRIP_REGRAB:EPM 夾具 Regrab 間隔
注意:此參數適用于高級用戶。
EPM 夾具重新抓取貨物以確保夾具沒有減弱的時間(以秒為單位);0 要禁用。
| Range | Units |
|---|---|
| 0 to 255 | seconds |
3.?MAV_CMD_DO_GRIPPER
支持單位:Copter (not Plane or Rover)。
操作 EPM 夾具的任務命令。
將 Copter 與夾持器集成的說明已過期,請使用 DO_SET_SERVO 激活夾持器(2015年4月)。
命令參數:
| Command Field | Mission Planner Field | Description |
|---|---|---|
| param1 | Gripper No | Gripper number (from 1 to maximum number of grippers on the vehicle). |
| param2 | drop(0)/grab(1) | Gripper action: 0:Release 1:Grab |
| param3 | Empty | |
| param4 | Empty | |
| param5 | Empty | |
| param6 | Empty | |
| param7 | Empty |






)

)
![洛谷 B4006 [GESP202406 四級] 寶箱](http://pic.xiahunao.cn/洛谷 B4006 [GESP202406 四級] 寶箱)

_正則表達式)





手工開通 OTP功能)

