基于ROS的智能網聯車遠程交互軟件,全UI無需記憶指令,劍指核心原理。
服務于中汽恒泰,偉大的項目,希望看官點贊,謝謝~~
進程(節點)列表化,參數面板化,實現快速機器人配置;
全ui交互,使用方便,降低使用門檻;
配合Rviz,節點數據輕松展現;
系統原理一目了然;
方便功能驗證與測試;
多ROS機器人 系統管理平臺的架構設計
設計草圖:
https://blog.csdn.net/qq_38288618/article/details/118443524
核心功能
-
定位
獲取來自多線激光雷達掃描數據,利用NDT算法計算車輛在地圖中當前位置
轉換GNSS室外定位或MarvelMind室內定位接收器發來的位置信息,結果作為定位算法的初始參考位置
可使用來自深度相機的圖像數據(融合慣導),利用ORB算法實現車輛的SLAM功能 -
感知識別
基于歐幾里德聚類算法,從多線激光雷達讀取點云數據,實現基于激光雷達的對象檢測功能
基于卡爾曼濾波器,預測檢測目標處理
基于Yolo算法,從相機讀取圖像數據,實現基于圖像的對象檢測功能
聯合標定激光雷達和深度相機,融合激光雷達對象檢測結果和圖像對象檢測結果
V2X系統對接,路側設備或路口各交通要素信息 -
規劃預測
基于Dijkstra、A*或openplaner等算法,生成從當前位置到指定位置的可行軌跡,實現全局路徑規劃、局部路徑規劃
使用目標跟蹤的結果來預測臨近物體的未來行動軌跡
根據預測結果進一步預測未來是否會與跟蹤目標發生碰撞 -
運動控制
接收計算的規劃結果生成控制指令,平滑濾波處理,下發到線控底盤,經驅動器實現驅動控制,如駕駛模式控制、車速控制、方向控制、制動控制等
管理功能
-
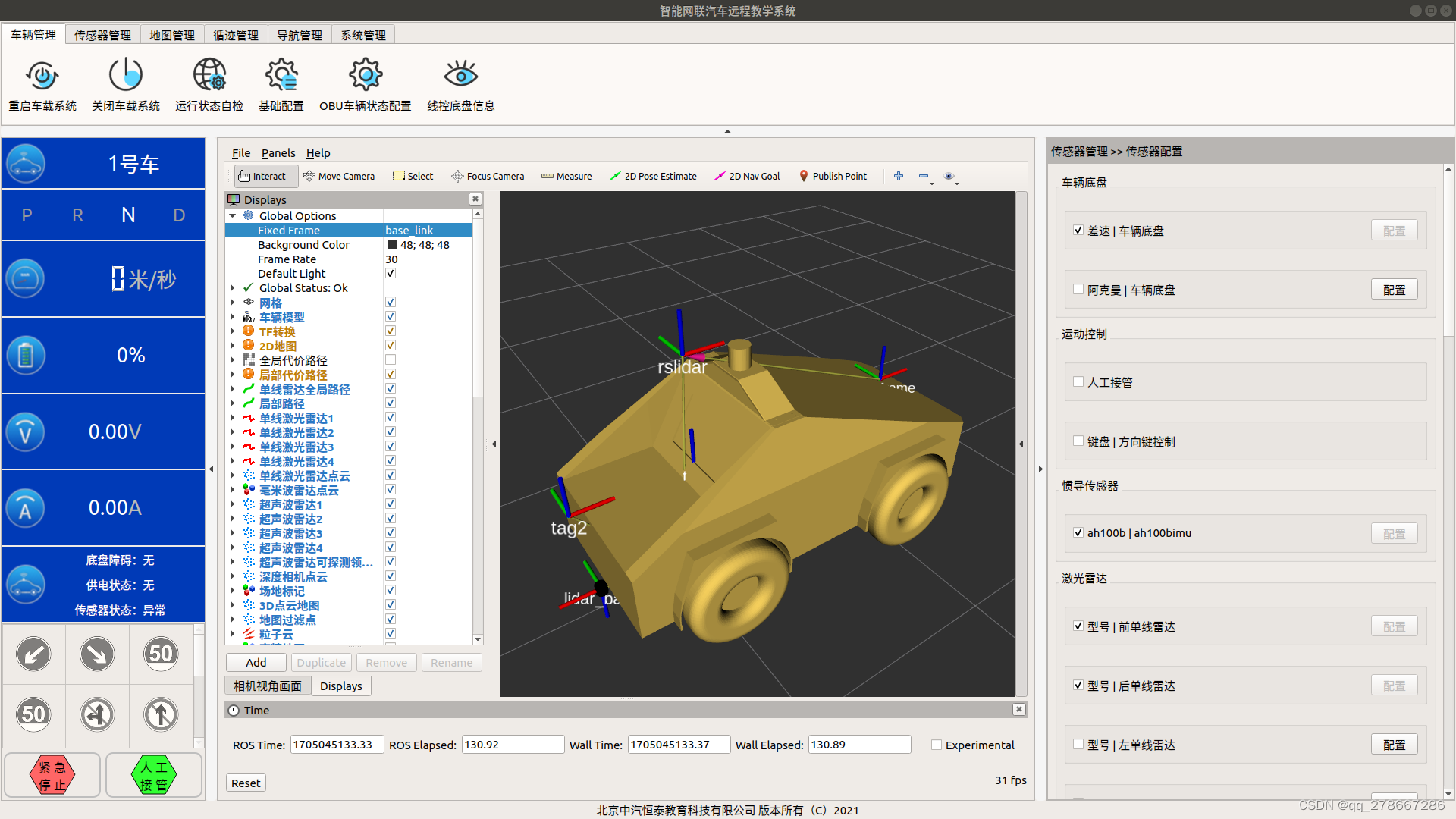
車輛管理
人工接管與急停、基礎配置、操縱配置、線控底盤參數
-
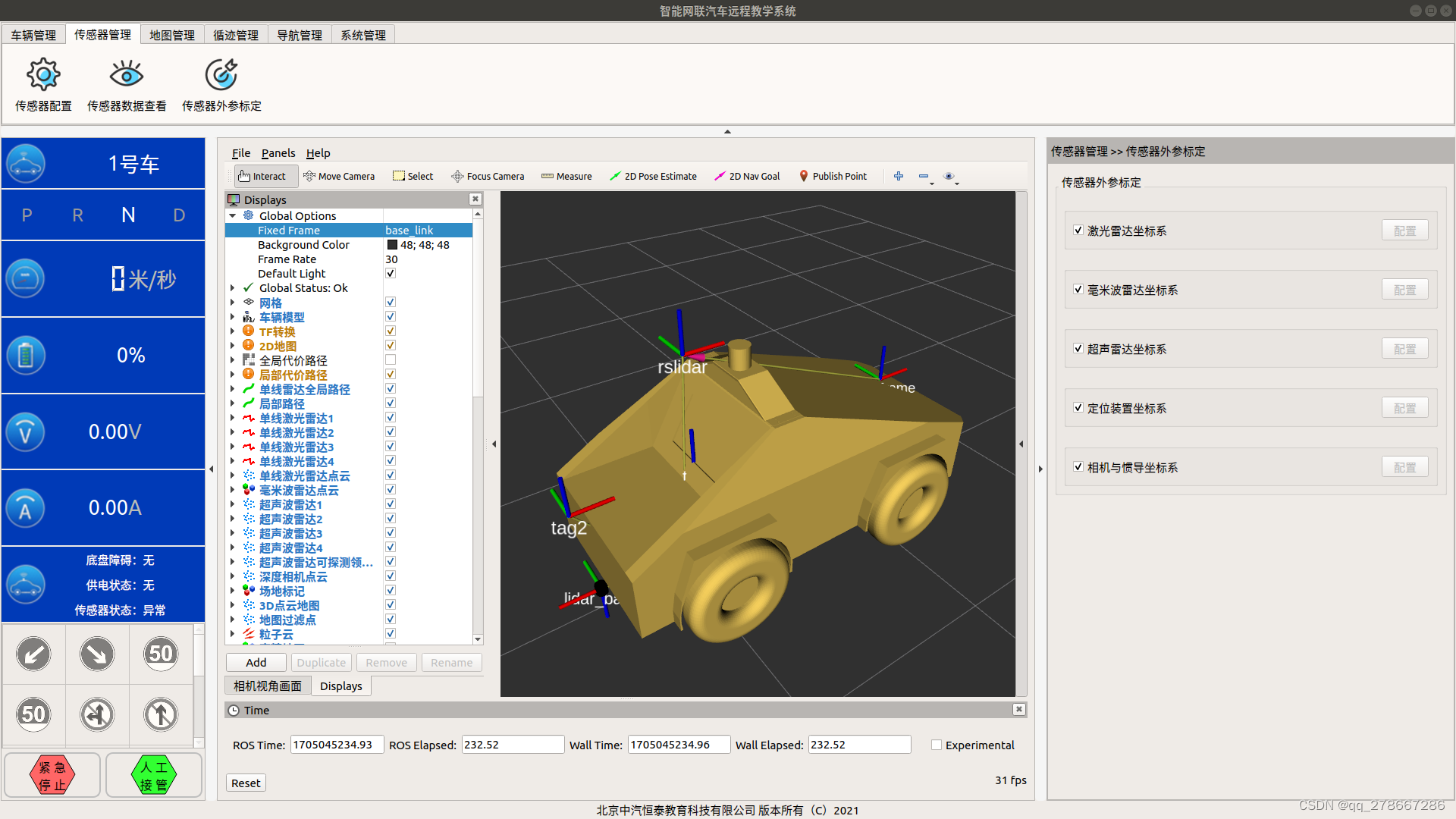
傳感器管理
傳感器配置管理、傳感器數據查看、外參標定
-
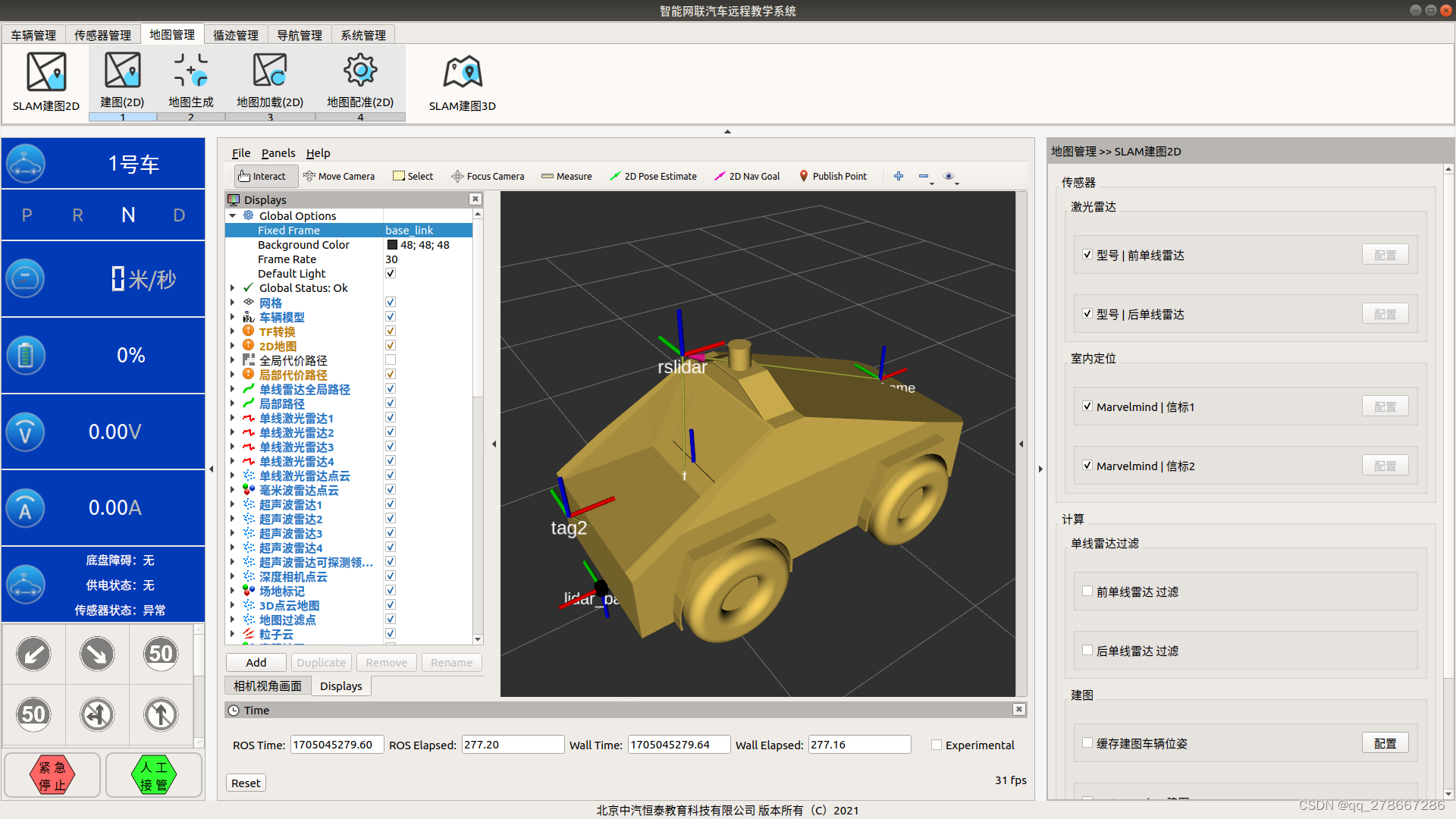
地圖管理
SLAM建圖、地圖加載
-
導航管理
目標設定、暫停/繼續導航、結束導航
-
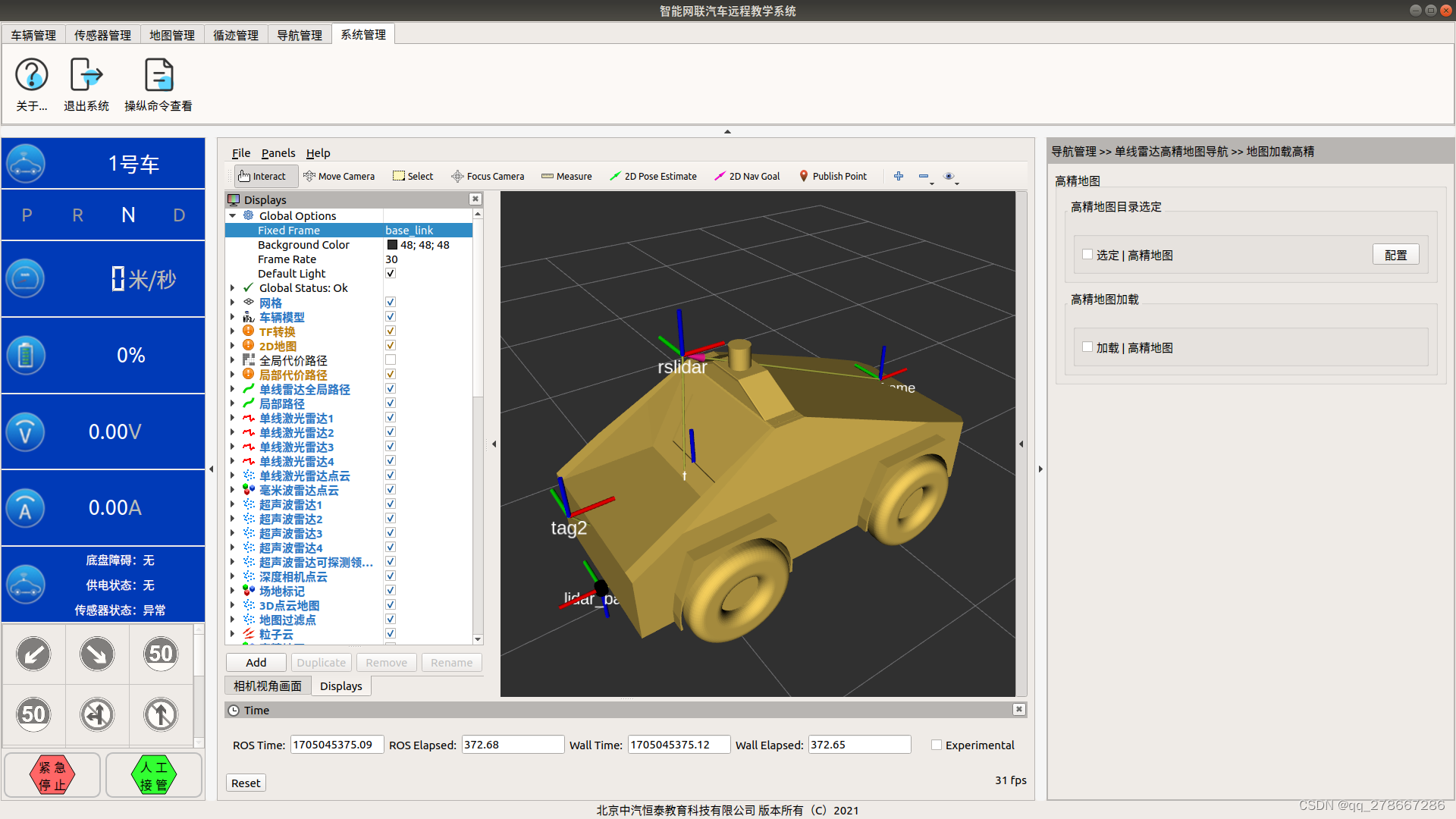
系統管理
系統信息、關于、幫助
實訓功能
-
建圖
建立并保存道路環境的點云圖
-
導航
根據已經建立好的點云圖,自動行駛到指定的地點,并以指定的位姿停止行駛
-
避障
在道路前方發現障礙時,實現減速并繞開障礙
-
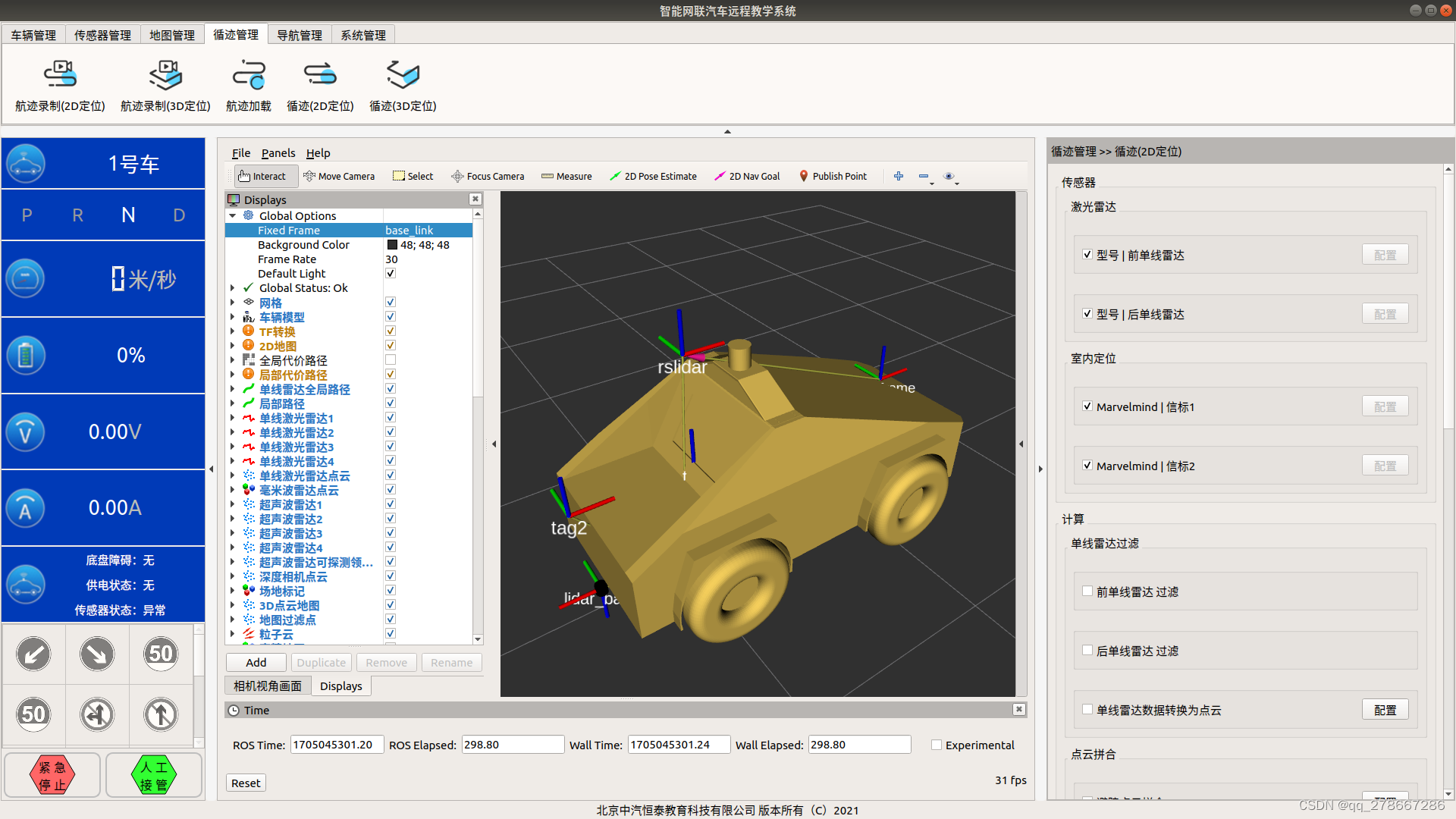
循跡形式
錄制/規定路徑,并按照該路徑行駛
-
定點停車
在指定位置以指定的姿態停車
-
人機交互
人工調整車輛運行速度、任務等
-
交規行駛
交規(紅綠燈、交通標志)行駛
-
自車狀態
獲取并顯示傳感器系統狀態、控制執行系統狀態以及車載系統的信息
-
運行日志
實時記錄車輛運行數據等




車輛管理:
 傳感器管理
傳感器管理
 地圖管理
地圖管理
 循跡管理
循跡管理
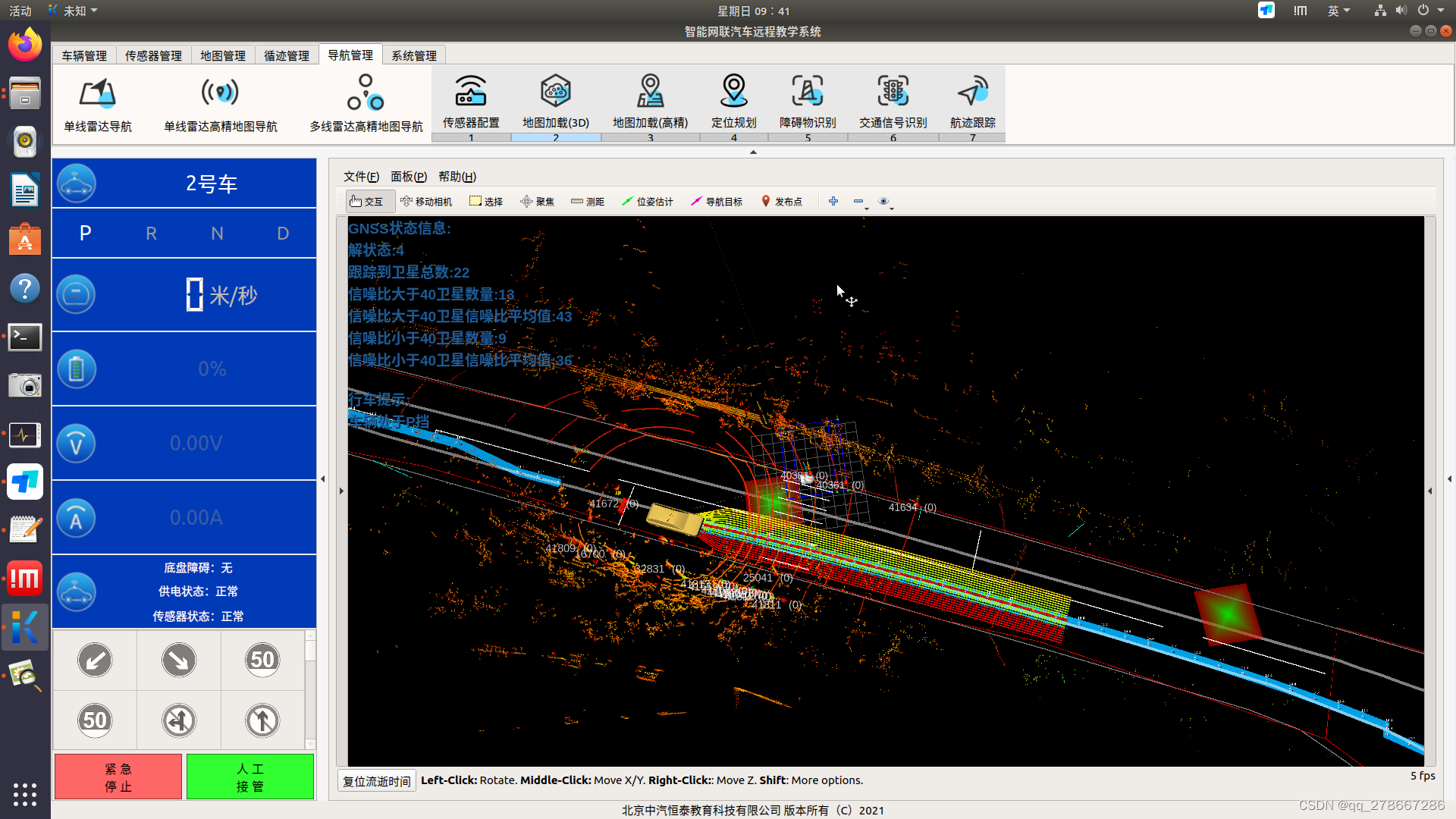
 導航管理
導航管理
:單線雷達高精地圖導航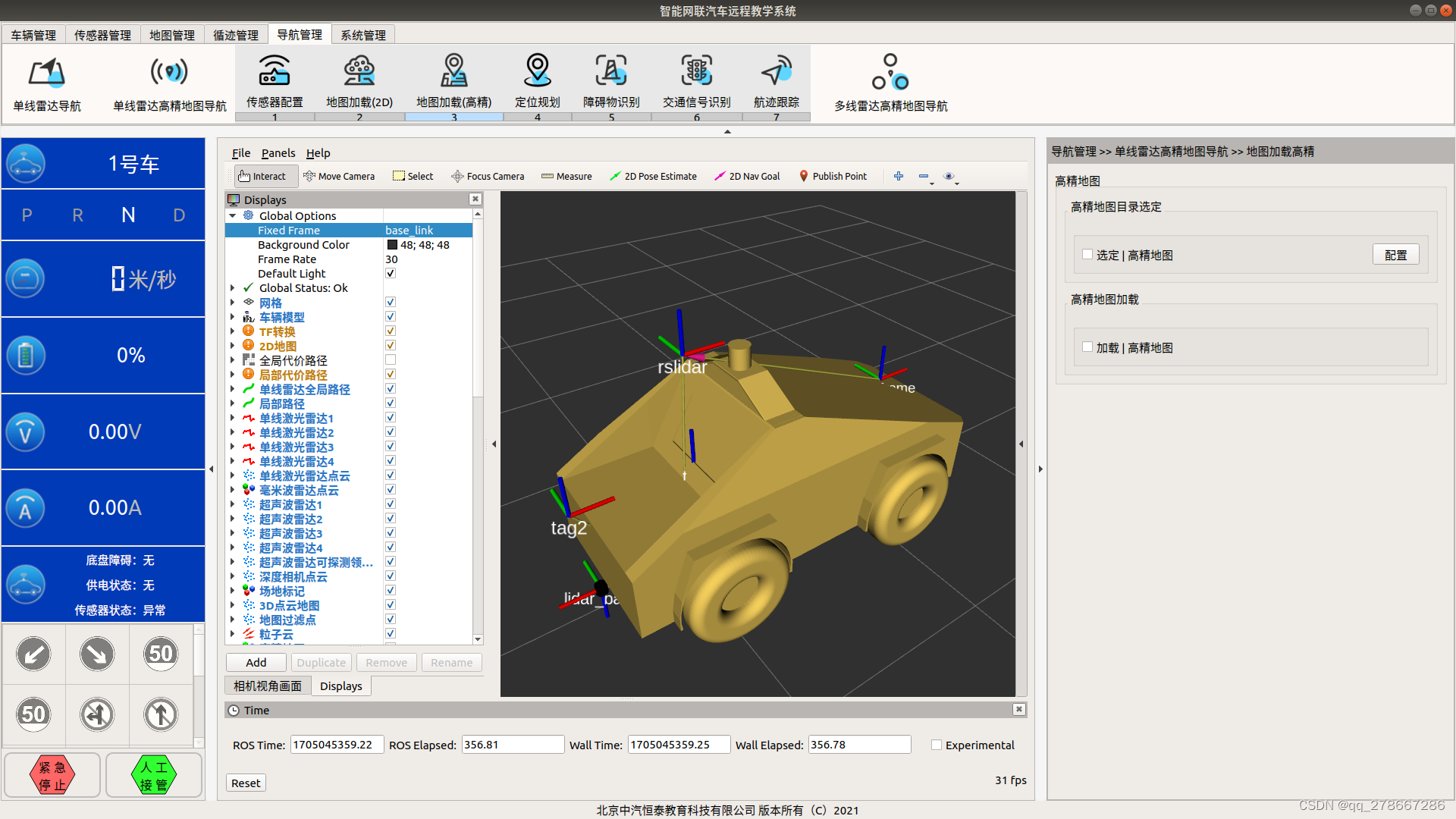 導航管理
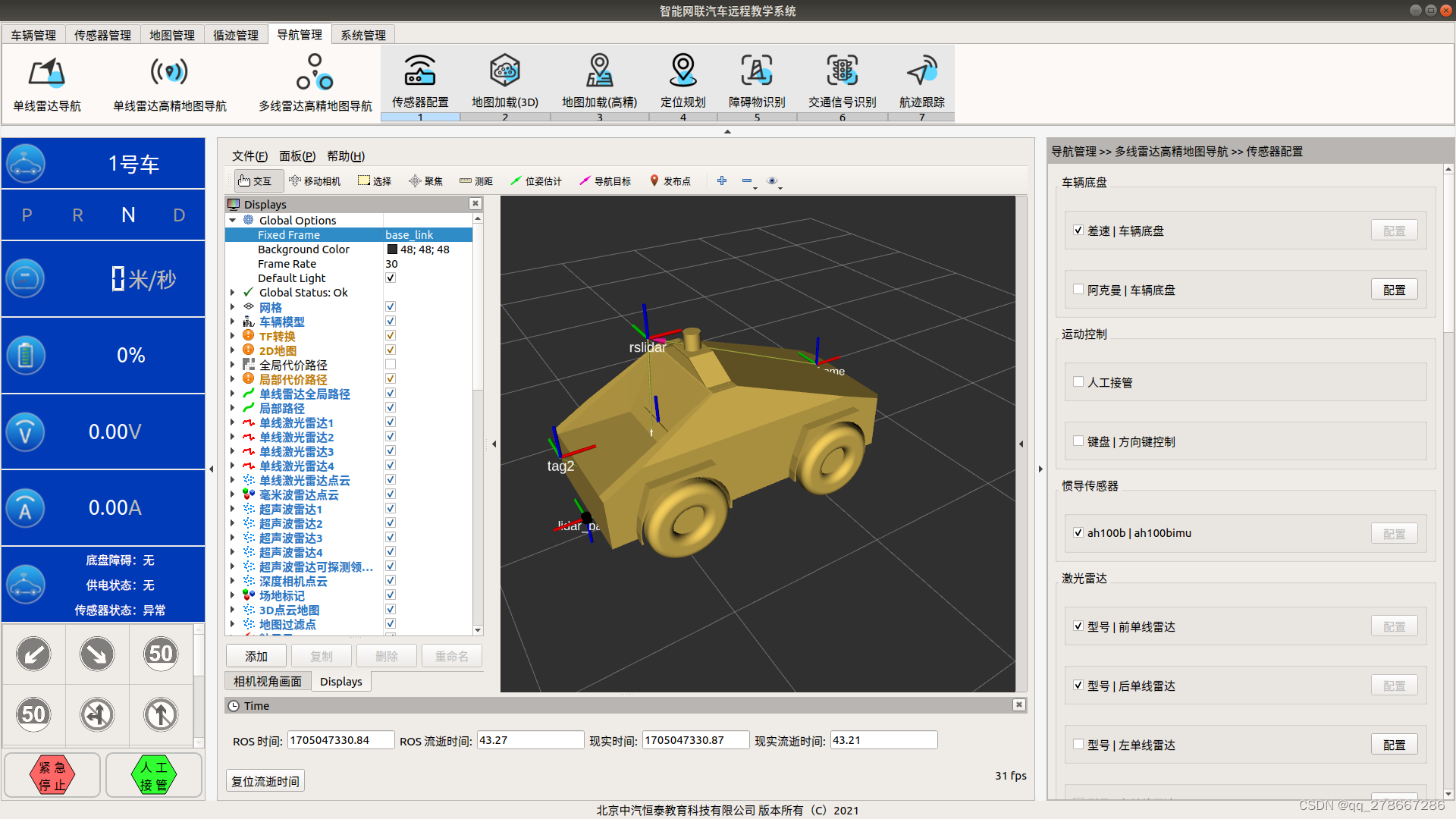
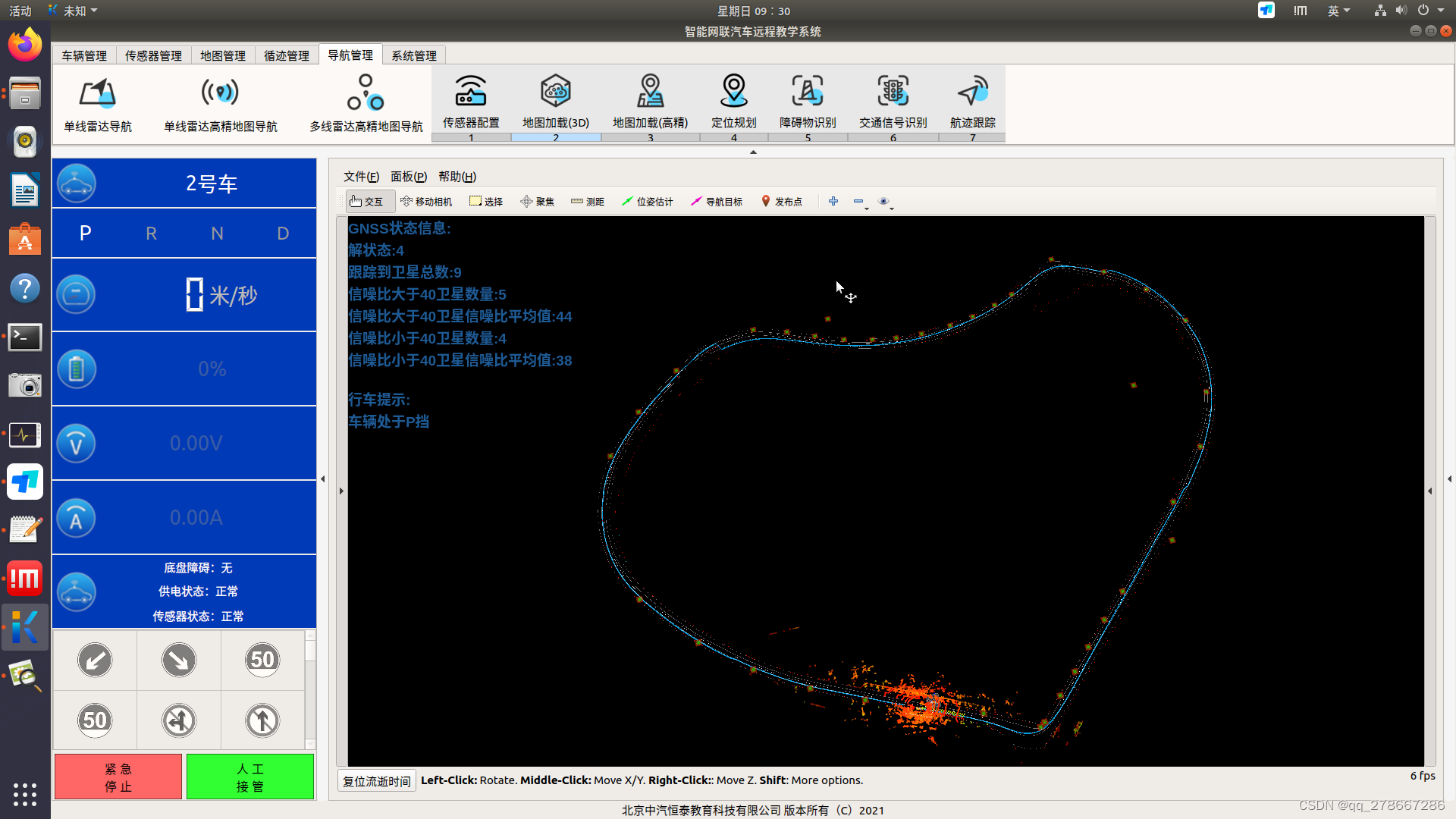
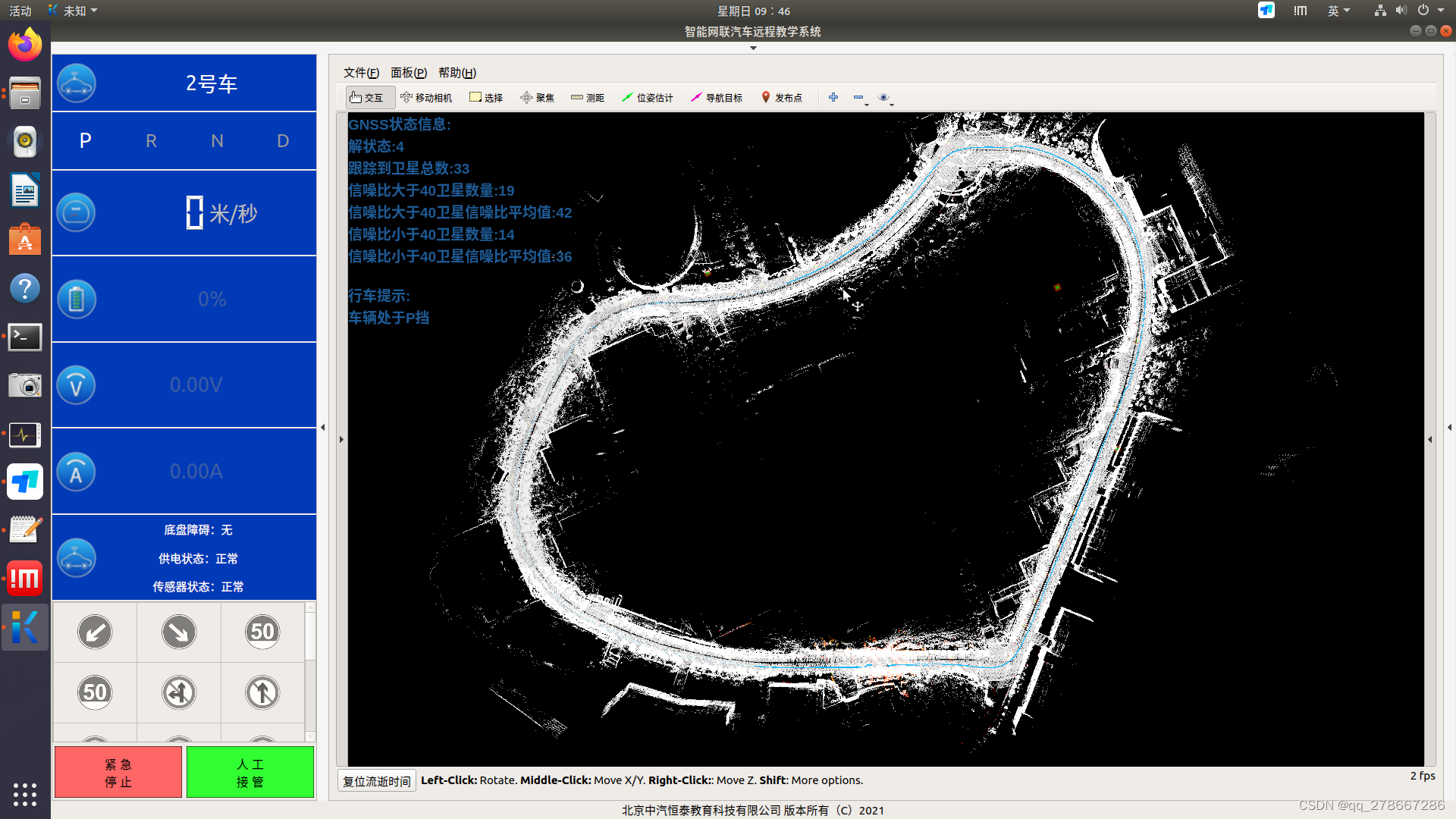
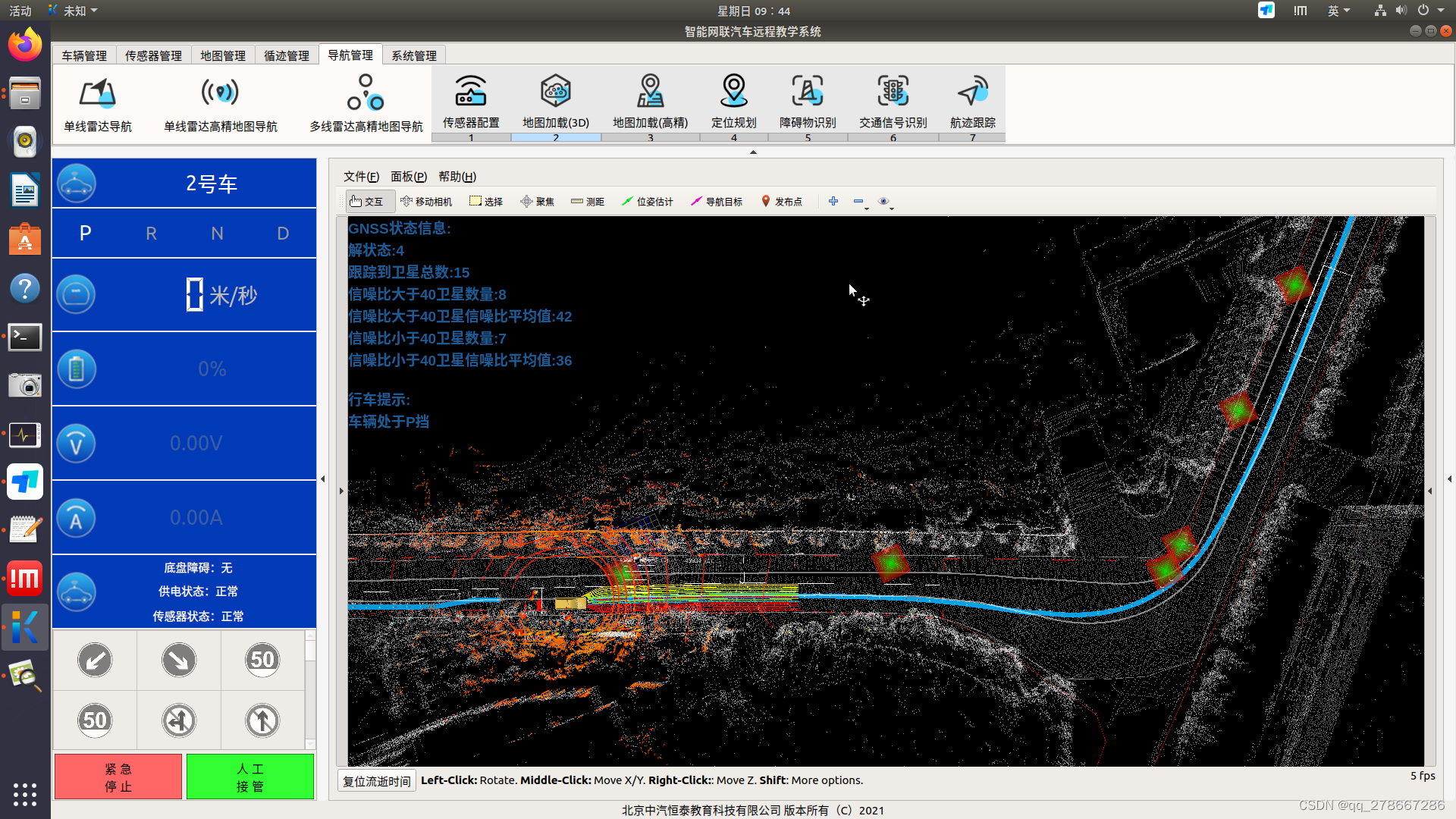
導航管理
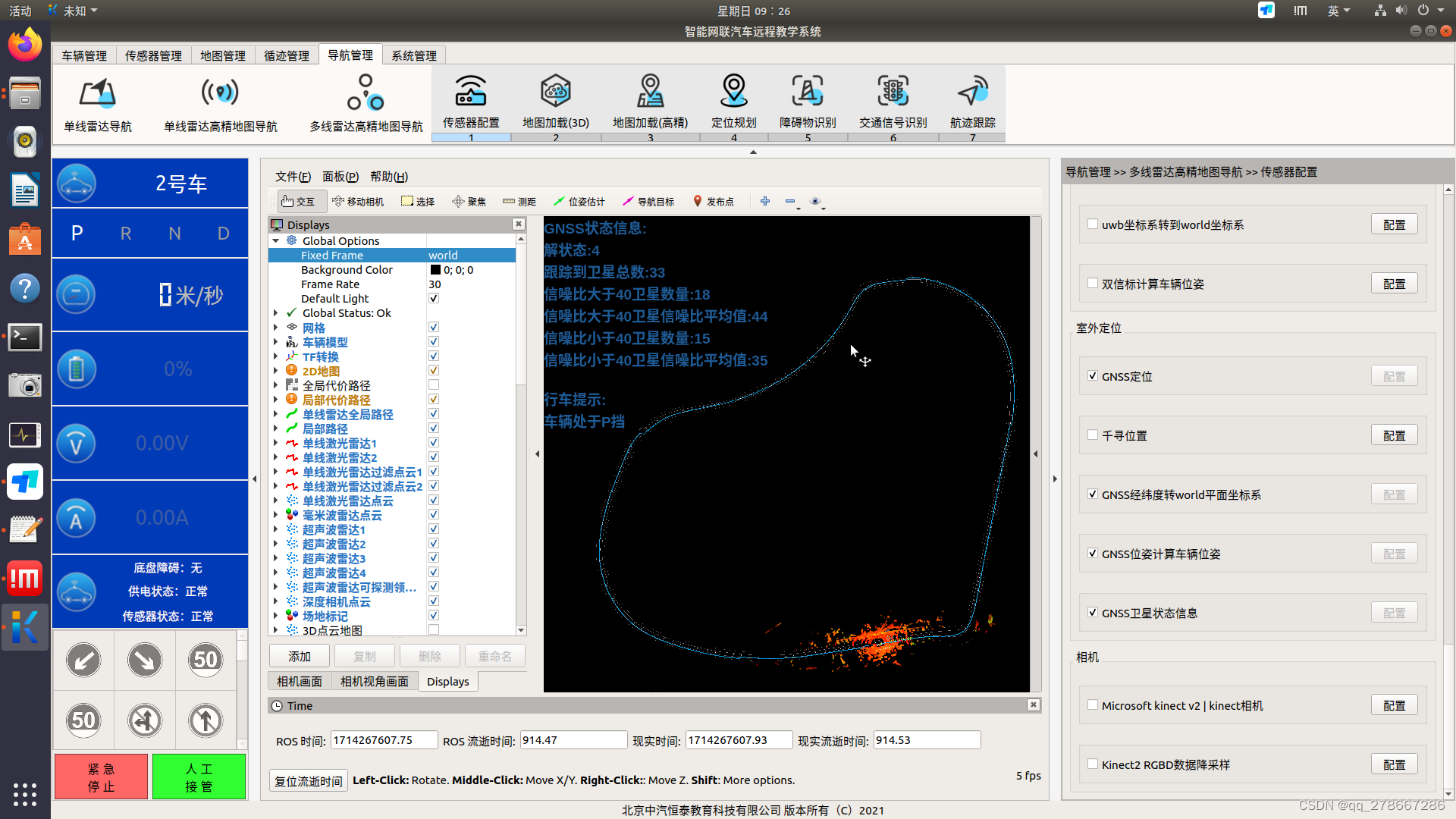
:多線雷達高精地圖導航
其他
云南交通項目實施一覽
場地大小約 500m*500m
 收起右側節點控制面板
收起右側節點控制面板
 收起上部導航菜單
收起上部導航菜單
 收起左測儀表數據盤
收起左測儀表數據盤
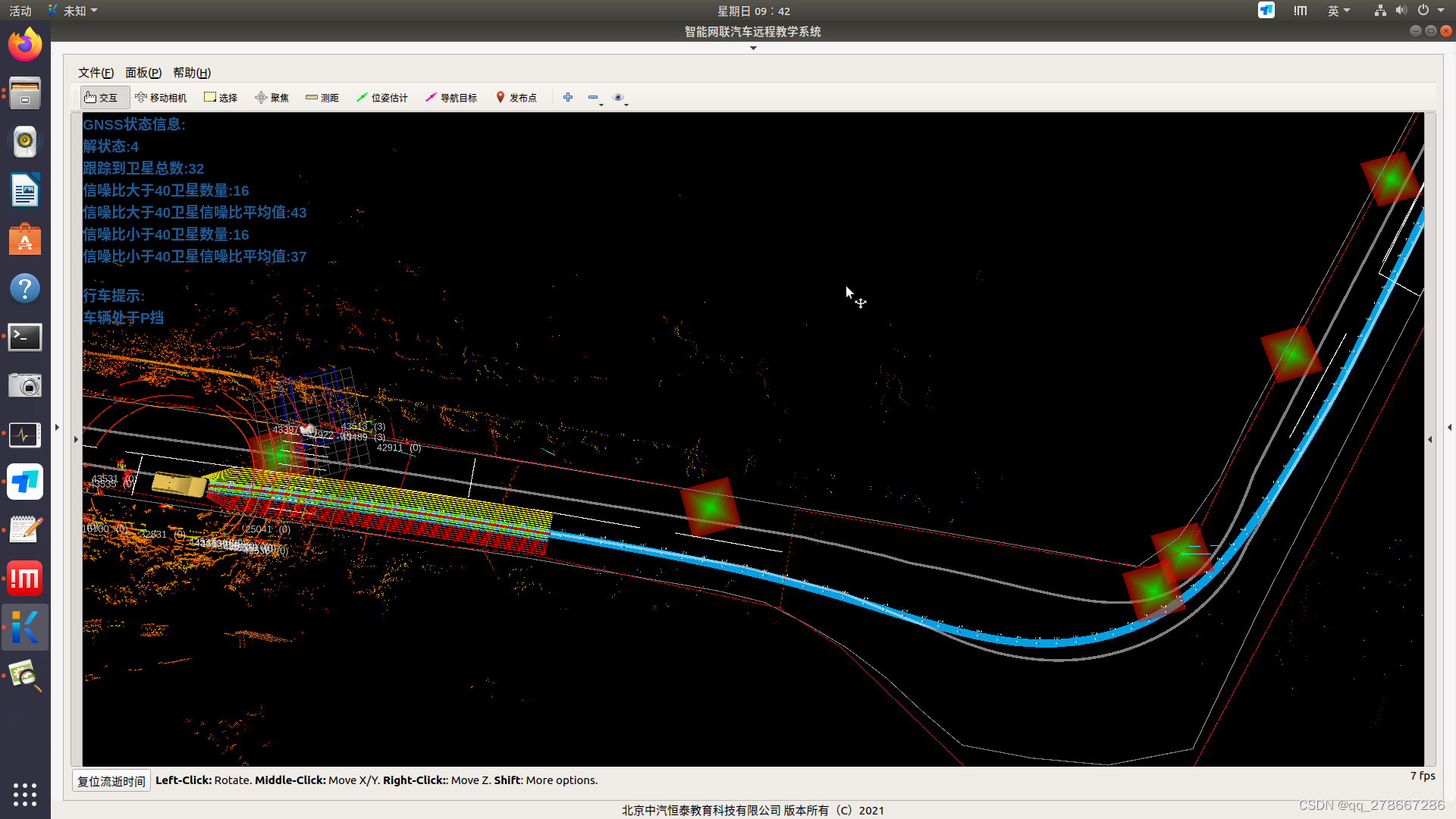
多線雷達高精地圖導航、遠程操控車輛行駛效果


)



)
)


:MP中內置的插件)









