gazebo獨立于ROS2,就像插件一樣,需要安裝。
1.安裝
sudo apt install gazebo
sudo apt install ros-humble-gazebo-*
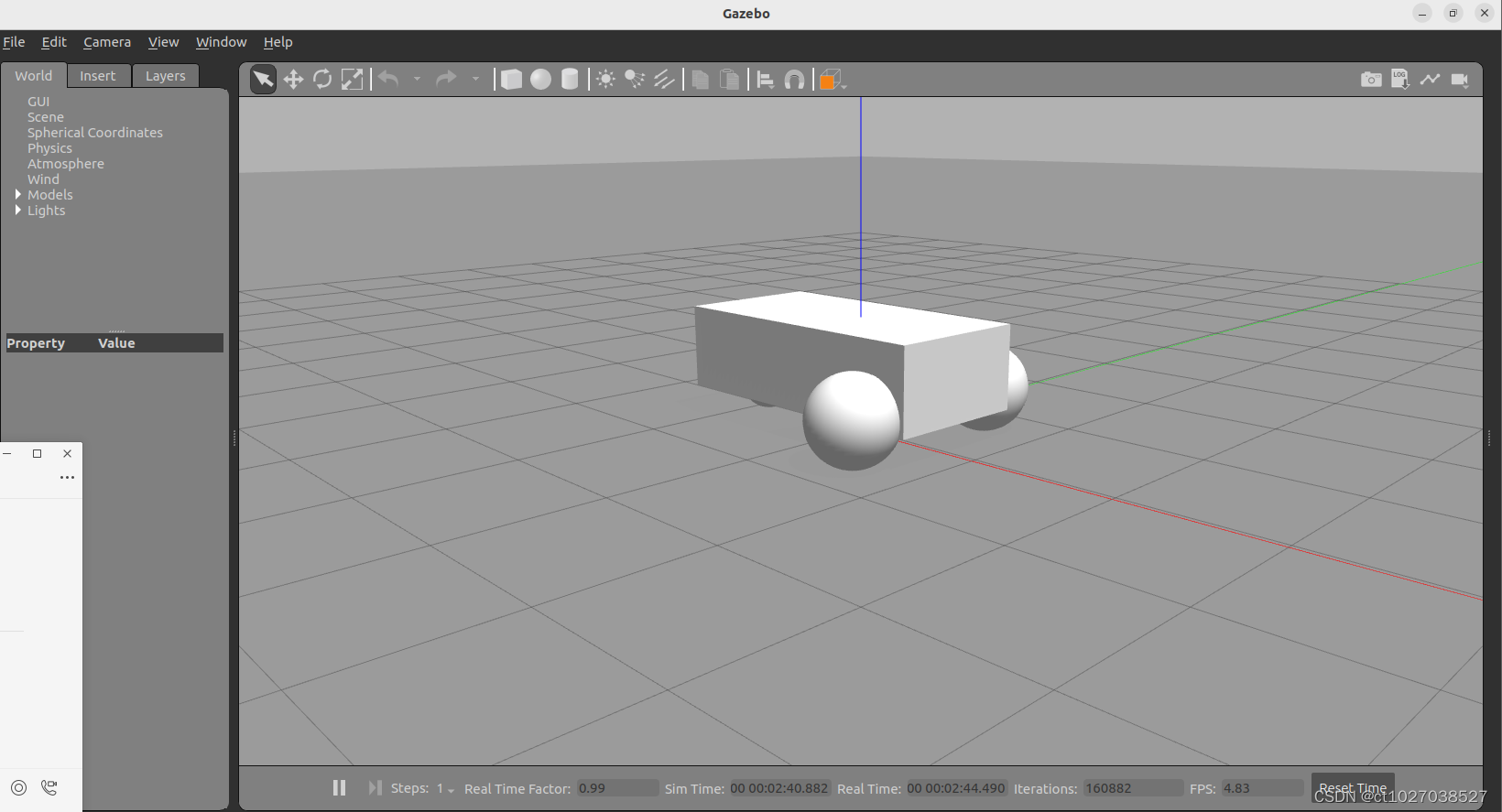
2.運行測試demo
gazebo /opt/ros/humble/share/gazebo_plugins/worlds/gazebo_ros_diff_drive_demo.world?
查看所有話題
ros2 topic list -t

發送話題、小車行進
ros2 topic pub /demo/cmd_demo geometry_msgs/msg/Twist "{linear: {x: 0.2,y: 0,z: 0},angular: {x: 0,y: 0,z: 0}}"

3.總結
RVIZ2是用來可視化數據的軟件,核心要義是將數據展示出來(我們不生產數據只做數據的搬運工)
Gazebo是用于模擬真實環境生產數據的(我們不搬運數據只做數據的生產者)
Gazebo是獨立于ROS/ROS2的軟件(還有很多仿真軟件可以用ROS/ROS2)
ROS2和Gazebo之間的橋梁是:gazebo_ros_pkgs



接口和SA接口(Serial Audio Interface)的區別)





)
)








