目錄
一、中斷系統
1、中斷的原理
2、中斷類型
外部中斷
定時器中斷
DMA中斷
3、中斷處理函數
中斷標志位清除
中斷服務程序退出?
二、實際應用
中斷控制LED?
任務要求
代碼示例
中斷控制串口通信
任務要求1
代碼示例
任務要求2
代碼示例
總結
學習目標:
學習stm32中斷原理和開發編程方法,實現中斷點亮LED燈;中斷發送消息。
一、中斷系統
STM32微控制器的中斷系統是其功能強大和靈活性的重要組成部分。中斷允許微控制器在執行主程序的同時,及時響應外部事件或內部條件的變化,從而實現高效的實時控制和數據處理。核心的中斷控制器是NVIC(Nested Vectored Interrupt Controller),負責管理和分發所有的中斷請求,并支持優先級分組,使開發人員能夠為不同的中斷源設置不同的優先級。STM32支持多種類型的中斷,包括外部中斷、定時器中斷、串口中斷和DMA中斷。每種中斷類型都有特定的配置方式和中斷服務程序編寫規范,以確保及時和有效地處理相應的事件。中斷使能和中斷優先級設置是配置中斷系統的關鍵步驟,同時需要編寫高效的中斷服務程序,以便快速響應并盡快恢復主程序的執行。這些特性使得STM32在廣泛的嵌入式應用中表現出色,為實時控制和數據處理提供了強大支持。
1、中斷的原理
下面通過一個生活中的例子,幫助更好的去理解中斷:
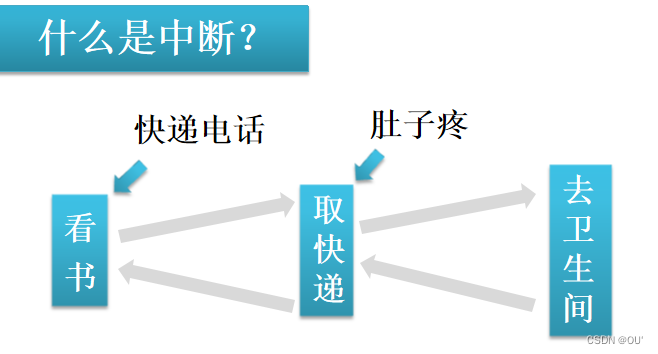
可以看到圖中,由最開始的看書,轉到最后的去衛生間,這個過程中,看書就受到了中斷。我們將看書看作主程序,快遞電話、肚子疼視為中斷源,取快遞和去衛生間視為中斷服務程序?,但是通過箭頭可以看到,最后還是返回到了看書的 “主程序” ,所以,中斷還存在返回,我們叫做中斷返回。
在計算機中,執行程序過程中,當出現異常情況(斷電等)或特殊請求(數據傳輸等)時,計算機暫停現行程序的運行,轉向對這些異常情況或特殊請求進行處理,處理完畢后再返回到現行程序的中斷處,繼續執行原程序,這就是“中斷”。
中斷的主要處理流程為:中斷請求——>中斷響應——>中斷服務——>中斷返回
中斷請求:中斷請求是中斷源向CPU發出中斷請求信號,此時中斷控制系統的中斷請求寄存器被置位,向CPU請求中斷
中斷響應:CPU的中斷系統判斷中斷源的中斷請求是否符合中斷響應條件,如果符合條件,則暫時中斷當前程序并控制程序跳轉到中斷服務程序
中斷服務:為處理中斷而編寫的程序稱為中斷服務程序,是由開發人員針對具體中斷所要實現的功能進行設計和編寫的,需要由開發人員來實現
中斷返回:CPU退出中斷服務程序,返回到中斷請求響應之前被中止的位置繼續執行主程序。這部分操作同樣由硬件來實現,不需要開發人員進行處理

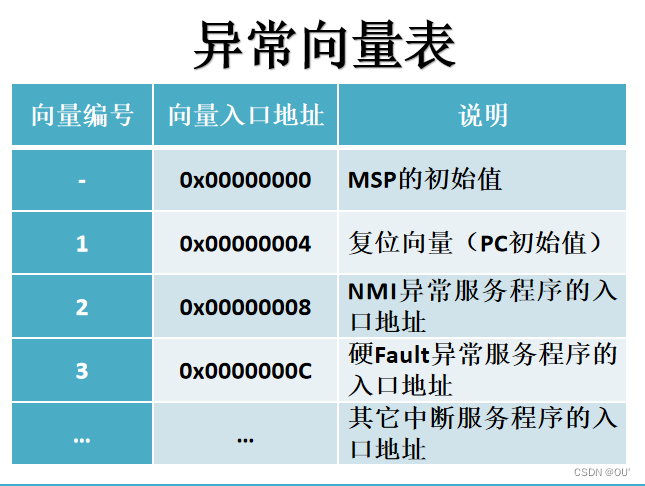
?當發生了異常或中斷,內核要想響應這些異常或中斷,就需要知道這些異常或中斷的服務程序的入口地址,再由入口地址找到相應的中斷服務程序,由中斷入口地址組成的表稱作中斷向量表(如下圖)。
STM32中斷系統的結構和工作原理如下:
中斷請求來源:STM32的中斷請求可以來自外部和內部兩個方面。外部中斷是由GPIO口引腳的電平或邊沿信號變化觸發,而內部中斷通常是由硬件模塊(如定時器、ADC)或軟件產生的。
NVIC控制器:在STM32中,所有中斷請求都由NVIC(Nested Vectored Interrupt Controller)控制器進行管理和調度。NVIC是一個基于向量表的中斷控制器,通過優先級和向量表來實現對中斷請求的管理。
中斷分組:STM32將中斷分為多個組別,每個組別包含一組中斷請求。不同組別的中斷請求可以具有不同的優先級,并且可以使用優先級搶占和屏蔽機制來確保系統的實時性和可靠性。STM32中斷分組方式可選為0~4個前綴,用于設定中斷優先級組和亞組。
中斷服務程序:當中斷事件發生后,CPU會暫停當前任務并跳轉到相應的中斷服務程序,處理該事件。中斷服務程序通常包括以下幾個步驟:保存CPU寄存器的值(包括堆棧指針、程序計數器等)處理中斷請求(根據外部或內部中斷的類型進行相應的處理,如清除標志位、讀取數據等操作)執行用戶自定義代碼(根據實際需求執行用戶自定義的代碼段)恢復CPU寄存器的值(將保存在堆棧中的寄存器值恢復到其原始狀態,以便CPU繼續執行之前的任務)
中斷優先級:STM32中,所有中斷請求都具有唯一的編號(IRQn),并且可以根據編號和中斷分組方式確定其優先級。優先級高的中斷可以打斷正在執行的低優先級中斷,從而確保系統的實時性和可靠性。如果多個中斷請求的優先級相同,則可以使用優先級搶占機制來確定響應順序

2、中斷類型
外部中斷
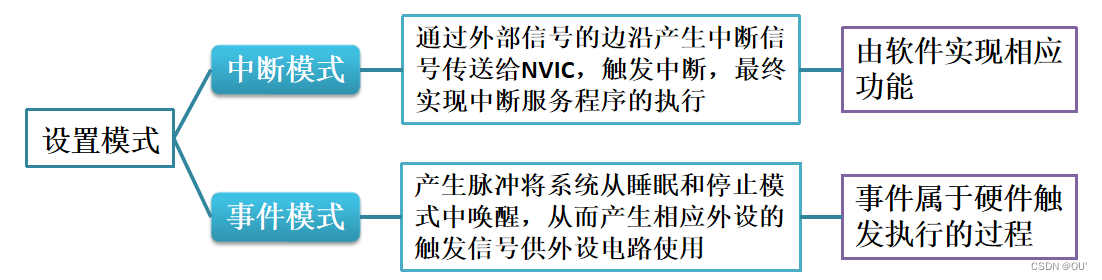
EXTI(外部中斷/事件控制器)支持19個外部中斷/事件請求,每個中斷/事件都有獨立的觸發和屏蔽設置,具有中斷模式和事件模式兩種設置模式。
其是一種通過配置GPIO引腳并使用EXTI線路實現的事件處理機制。在初始化GPIO引腳為輸入并設置相應的中斷觸發方式后,可以通過編寫中斷服務程序來響應外部事件。例如,配置GPIO引腳為上升沿觸發,當引腳接收到上升沿信號時,會觸發預先定義的中斷服務程序,以便快速處理事件。這種機制使得STM32能夠高效地監聽和響應外部觸發事件,廣泛應用于各種應用場景中。

- 輸入線:EXTI有19個中斷/事件輸入線,這些輸入線可以通過寄存器設置為任意一個GPIO,也可以是一些外設事件。
- 邊沿檢測電路:它會根據上升沿觸發選擇寄存器(EXTI_RTSR)和下降沿出發選擇器(EXTI_FTSR)對應的設置來控制信號觸發。
上升沿觸發選擇寄存器:要配置STM32微控制器的外部中斷以在上升沿觸發時響應,首先需通過GPIO的配置寄存器(如GPIOxCRH或GPIOxCRL)將相應引腳設置為輸入模式。接著,在EXTIx_RTSR寄存器中設置相應的位來使能對應的外部中斷線x的上升沿觸發。最后,在NVIC中使能對應外部中斷的中斷處理。這些步驟確保了當引腳接收到上升沿信號時,系統能夠及時調用預定義的中斷服務程序來處理事件。
下降沿觸發選擇寄存器:要配置STM32微控制器的外部中斷以在下降沿觸發時響應,首先需通過GPIO的配置寄存器(如GPIOx_CRH或GPIOx_CRL)將相應引腳設置為輸入模式。接著,在EXTIx_FTSR寄存器中設置相應的位來使能對應的外部中斷線x的下降沿觸發。最后,在NVIC中使能對應外部中斷的中斷處理。這些步驟確保了當引腳接收到下降沿信號時,系統能夠及時調用預定義的中斷服務程序來處理事件。
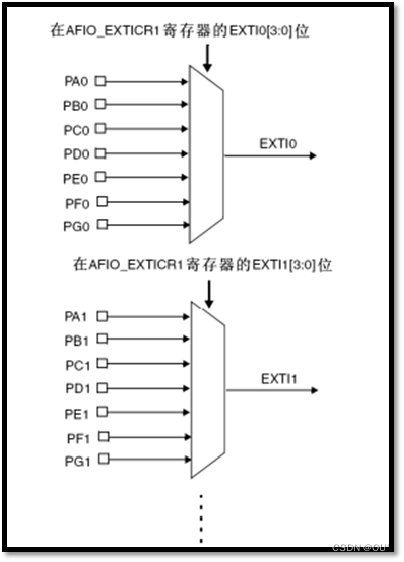
GPIO的中斷是以組為單位的,同組的外部中斷公用一條外部中斷線。 ? ?
例如:PA0、PB0、PC0、PD0、PE0、PF0、PG0這些為一組,如果使用PA0作為外部中斷源,那么PB0、PC0、PD0、PE0、PF0、PG0就不能同時再作為外部中斷使用了,在此情況下,只能使用類似于PB1、PC2這種末端序號不同的外部中斷源。
GPIO引腳和外部中斷線的映射關系圖如下:
定時器中斷
STM32微控制器的定時器是關鍵的外設,用于生成精確的時間延遲和周期性任務。通過選擇合適的定時器類型(如通用定時器TIM或基本定時器TIM6/TIM7),配置工作模式和中斷觸發條件,可以實現定時器中斷功能。配置過程包括設置時鐘源、計數器初值和自動重裝載寄存器,以及使能中斷并編寫相應的中斷服務程序。這些步驟確保了定時器可以在達到預設計數值時產生中斷請求,從而實現精確的時間控制和周期性任務執行,適用于實時操作系統、通信協議和其他時間敏感應用。
要配置STM32微控制器的定時器中斷,首先選擇適合需求的定時器(如TIM1、TIM2等),配置其工作模式、時鐘源和計數周期。通過使能定時器中斷控制寄存器中的更新中斷位(UIE),允許定時器溢出時產生中斷請求。
- 時鐘和預分頻設置:選擇適當的時鐘源和預分頻器,以確定定時器的計數頻率。
- 計數器設置:設置定時器的計數器初值和自動重裝載寄存器(ARR),確定定時器的計數周期。
- 中斷使能:通過使能定時器中斷使能寄存器中的相應中斷使能位(如UIE),允許定時器溢出時產生中斷請求。
然后編寫中斷服務程序來處理定時器中斷事件,包括清除中斷標志、執行特定的定時任務并重新配置定時器。最后,確保在主程序中使能全局中斷,以確保定時器中斷能夠正常觸發和處理。這些步驟能夠有效配置和利用STM32定時器中斷功能,用于實現各種時間相關的應用和功能需求。
DMA中斷
?在STM32微控制器中,DMA(直接存儲器訪問)提供了高效的數據傳輸機制,允許外設和內存之間直接交換數據,無需CPU的干預,從而提升系統效率和響應速度。DMA傳輸完成時可觸發中斷通知CPU,通過使能DMA中斷并配置中斷服務程序,可以實現在數據傳輸完成時執行額外操作或啟動后續任務,適用于實時數據處理、高速數據采集和圖形顯示等應用場景,有效優化系統性能和數據處理效率。
3、中斷處理函數

中斷標志位清除
void EXTI0_IRQHandler(void)
{if (EXTI_GetITStatus(EXTI_Line0) != RESET){EXTI_ClearITPendingBit(EXTI_Line0);// 接中斷服務程序代碼}
}中斷服務程序退出?
void EXTI0_IRQHandler(void)
{if (EXTI_GetITStatus(EXTI_Line0) != RESET){EXTI_ClearITPendingBit(EXTI_Line0);// 接中斷服務程序代碼}NVIC_ClearPendingIRQ(EXTI0_IRQn);二、實際應用
中斷控制LED?
任務要求
用stm32F103核心板的GPIOA端一管腳接一個LED,GPIOB端口一引腳接一個開關(用杜邦線模擬代替)。采用中斷模式編程,當開關接高電平時,LED亮燈;接低電平時,LED滅燈。如果完成后,嘗試在main函數while循環中加入一個串口每隔1s 發送一次字符的代碼片段,觀察按鍵中斷對串口發送是否會帶來干擾或延遲。
代碼示例
LED.c
#include "stm32f10x.h" // Device header/*** 函 數:LED初始化* 參 數:無* 返 回 值:無*/
void LED_Init(void)
{/*開啟時鐘*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //開啟GPIOA的時鐘/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_ResetBits(GPIOA, GPIO_Pin_0);
}?exti_key.c
#include "exti_key.h"
#include "misc.h"void EXTI_Key_Init(void)
{ GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; // 使用 B 口的引腳 1GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOB, &GPIO_InitStructure);NVIC_InitTypeDef NVIC_InitStructure;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; // 使用與 GPIOB 引腳 1 相關的外部中斷通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure); EXTI_InitTypeDef EXTI_InitStructure;EXTI_ClearITPendingBit(EXTI_Line1); GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1); // 將 GPIOB 和引腳 1 配置為外部中斷EXTI_InitStructure.EXTI_Line = EXTI_Line1;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure);
}main.c
#include "stm32f10x.h" // Device header
#include "LED.h"
#include "exti_key.h"int main(void)
{LED_Init();GPIO_ResetBits(GPIOA,GPIO_Pin_0);EXTI_Key_Init();while (1){}
}
//void EXTI1_IRQHandler(void)
//{
// if(EXTI_GetITStatus(EXTI_Line1) != RESET)
// {
// GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)((1-GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_0))));
// EXTI_ClearITPendingBit(EXTI_Line1);
// }
//}
//兩種方法
uint8_t led = 1;void EXTI1_IRQHandler(void)
{if(EXTI_GetITStatus(EXTI_Line1) != RESET){led = ~led; //狀態翻轉//如果等于1,則PB1復位點亮,否則置1熄滅if(led == 1)GPIO_ResetBits(GPIOA,GPIO_Pin_0);elseGPIO_SetBits(GPIOA,GPIO_Pin_0); }EXTI_ClearITPendingBit(EXTI_Line1); //清除EXTI1的中斷標志位
}即可實現中斷控制LED燈亮滅。
中斷控制串口通信
任務要求1
當stm32接收到1個字符“s”時,停止持續發送“hello windows!”; 當接收到1個字符“t”時,持續發送“hello windows!”
代碼示例
#include "stm32f10x.h"
#include "misc.h"
#include <string.h>volatile uint8_t send_enabled = 0; // 全局變量,控制發送行為void USART_Configuration(void) {USART_InitTypeDef USART_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;// 打開 GPIO 與 USART 端口的時鐘RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);// 配置 USART1 Tx (PA.09) 為復用推挽輸出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);// 配置 USART1 Rx (PA.10) 為浮空輸入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA, &GPIO_InitStructure);// 配置 USART 參數USART_InitStructure.USART_BaudRate = 9600;USART_InitStructure.USART_WordLength = USART_WordLength_8b;USART_InitStructure.USART_StopBits = USART_StopBits_1;USART_InitStructure.USART_Parity = USART_Parity_No;USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure);// 使能 USARTUSART_Cmd(USART1, ENABLE);// 使能接收中斷USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);// 配置 NVICNVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);
}void USART1_IRQHandler(void) {if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {char data = USART_ReceiveData(USART1);if(data == 's') { // 接收到 's' 停止發送send_enabled = 0;} else if (data == 't') { // 接收到 't' 開始發送send_enabled = 1;}USART_ClearITPendingBit(USART1, USART_IT_RXNE);}
}void Delay(__IO uint32_t nCount) {for(; nCount != 0; nCount--);
}int main(void) {SystemInit();USART_Configuration();char *str = "hello windows!\r\n";while(1) {if(send_enabled) {for(uint32_t i = 0; i < strlen(str); i++) {while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);USART_SendData(USART1, str[i]);}}Delay(5000000);}
}任務要求2
當stm32接收到字符“stop stm32!”時,停止持續發送“hello windows!”; 當接收到字符“go stm32!”時,持續發送“hello windows!”(提示:要將接收到的連續字符保存到一個字符數組里,進行判別匹配。寫一個接收字符串的函數。)
代碼示例
NVIC.c
#include "stm32f10x.h" // Device headervoid NVIC_Configuration(void) {NVIC_InitTypeDef NVIC_InitStructure;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);
}Serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>/*** 函 數:串口初始化* 參 數:無* 返 回 值:無*/
void Serial_Init(void)
{/*開啟時鐘*/USART_InitTypeDef USART_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);// USART Tx (PA.09) 配置為復用推挽輸出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);// USART Rx (PA.10) 配置為浮空輸入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA, &GPIO_InitStructure);USART_InitStructure.USART_BaudRate = 9600;USART_InitStructure.USART_WordLength = USART_WordLength_8b;USART_InitStructure.USART_StopBits = USART_StopBits_1;USART_InitStructure.USART_Parity = USART_Parity_No;USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure);USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 開啟接收中斷USART_Cmd(USART1, ENABLE);
}main.c
#include "stm32f10x.h"
#include "misc.h"
#include <string.h>
#include "Delay.h"
#include "Serial.h"
#include "NVIC.h"#define BUFFER_SIZE 100
volatile char buffer[BUFFER_SIZE];
volatile int buffer_index = 0;
volatile int send_enabled = 0;void USART1_IRQHandler(void) {if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {char data = (char)USART_ReceiveData(USART1);if (buffer_index < BUFFER_SIZE - 1) {buffer[buffer_index++] = data;buffer[buffer_index] = '\0'; // 保持字符串結尾char* temp_buffer = (char*)buffer; // 創建一個非 volatile 指針if (strstr(temp_buffer, "stop stm32!") != NULL) {send_enabled = 0;buffer_index = 0; // 清空緩沖區} else if (strstr(temp_buffer, "go stm32!") != NULL) {send_enabled = 1;buffer_index = 0; // 清空緩沖區}}}
}int main(void) {SystemInit();Serial_Init();NVIC_Configuration();char *str = "hello windows!\r\n";while (1) {if (send_enabled) {for (uint32_t i = 0; i < strlen(str); i++) {while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);USART_SendData(USART1, str[i]);}}Delay_ms(500);}
}最后使用串口助手即可(野火以及其他串口助手均可)。
總結
本章內容理解上不存在太多有問題的地方,對于中斷的理解更像是正51單片機的另一個翻版,對于實踐過程中的問題,遠遠多于理論理解,關于軟件的操作,環境的配置,串口的調試運行,都是之前學習的逐漸累積,在學習上,沒有一蹴而就,要腳踏實地,做好每一步,才可以更好更快,更高效率完成任務。
:建圖與定位(1))


”)
![mst[講課留檔]](http://pic.xiahunao.cn/mst[講課留檔])







)






