滑膜控制器
取PMSM狀態變量為:

ωref為目標轉速,ωm為電機輸出轉速。將此式求導得:

定義系統滑模面函數為:
![]()
對滑模面函數求導

在電機實際控制時,滑模控制方法存在高頻抖振問題,則需要選取合適的指數趨近率可以有效的減弱滑模抖振。因此,為了提高系統的性能,將引入改進的新型趨近率,得控制器的輸出方程為:

仿真模型
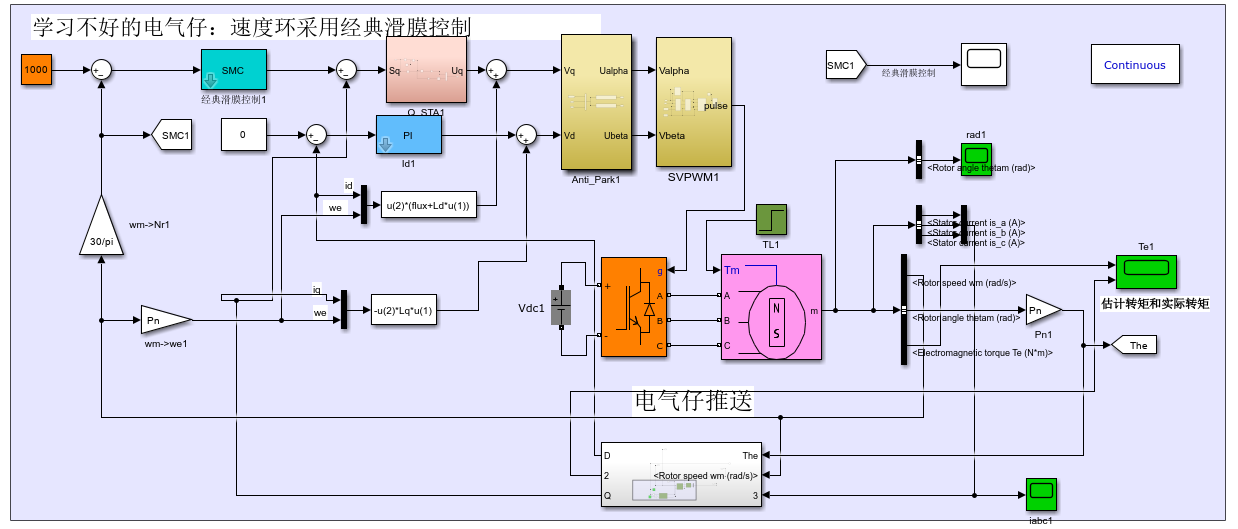
滑膜控制器部分

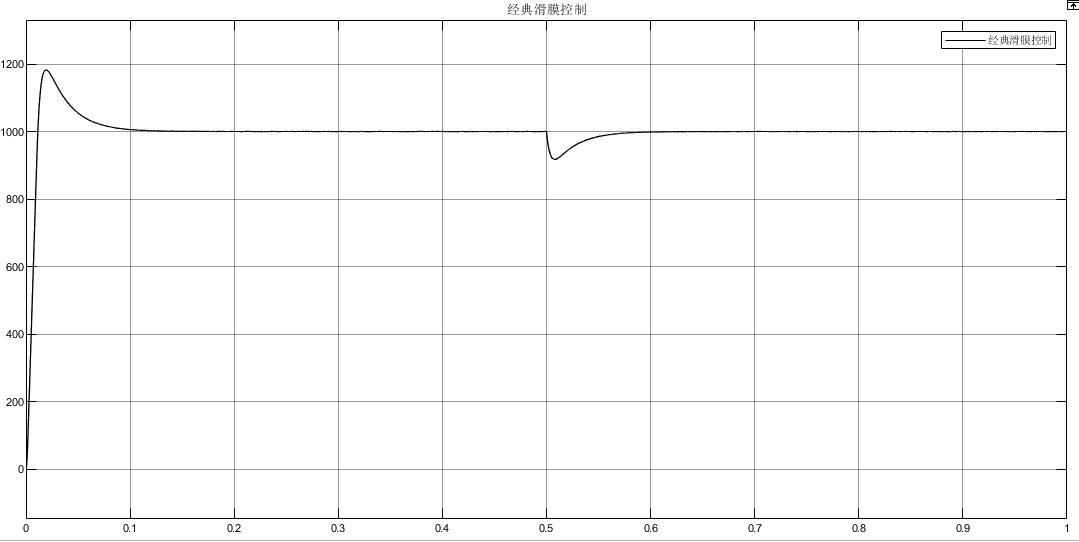
速度響應曲線
滑膜控制器
取PMSM狀態變量為:
ωref為目標轉速,ωm為電機輸出轉速。將此式求導得:
定義系統滑模面函數為:
![]()
對滑模面函數求導
在電機實際控制時,滑模控制方法存在高頻抖振問題,則需要選取合適的指數趨近率可以有效的減弱滑模抖振。因此,為了提高系統的性能,將引入改進的新型趨近率,得控制器的輸出方程為:
仿真模型
滑膜控制器部分
速度響應曲線
本文來自互聯網用戶投稿,該文觀點僅代表作者本人,不代表本站立場。本站僅提供信息存儲空間服務,不擁有所有權,不承擔相關法律責任。 如若轉載,請注明出處:http://www.pswp.cn/diannao/36767.shtml 繁體地址,請注明出處:http://hk.pswp.cn/diannao/36767.shtml 英文地址,請注明出處:http://en.pswp.cn/diannao/36767.shtml
如若內容造成侵權/違法違規/事實不符,請聯系多彩編程網進行投訴反饋email:809451989@qq.com,一經查實,立即刪除!)


![[數據集][目標檢測]電纜鋼絲繩線纜缺陷檢測數據集VOC+YOLO格式1800張3類別](http://pic.xiahunao.cn/[數據集][目標檢測]電纜鋼絲繩線纜缺陷檢測數據集VOC+YOLO格式1800張3類別)

![【2024最新華為OD-C/D卷試題匯總】[支持在線評測] 特殊加密算法(200分) - 三語言AC題解(Python/Java/Cpp)](http://pic.xiahunao.cn/【2024最新華為OD-C/D卷試題匯總】[支持在線評測] 特殊加密算法(200分) - 三語言AC題解(Python/Java/Cpp))









,無圖形界面問題。)



)