自動駕駛決策規劃算法第二章第二節(中) 參考線算法_嗶哩嗶哩_bilibili
動態規劃開辟的凸空間如下,兩條橙色線之間:

黃色的點就意味著L的上下界,物理意義是當軌跡s=s1時,L的范圍應該是(Lmin1,Lmax1)之間,這個范圍就是開辟的凸空間。

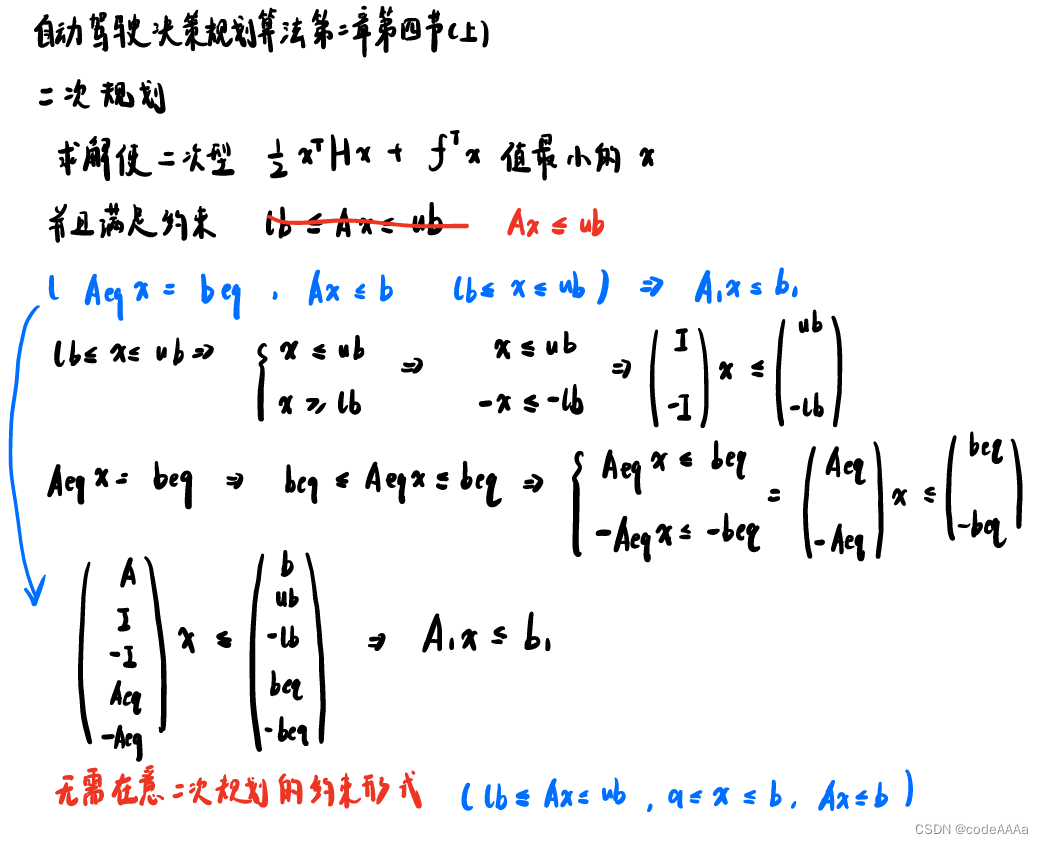
規劃的路徑要滿足:
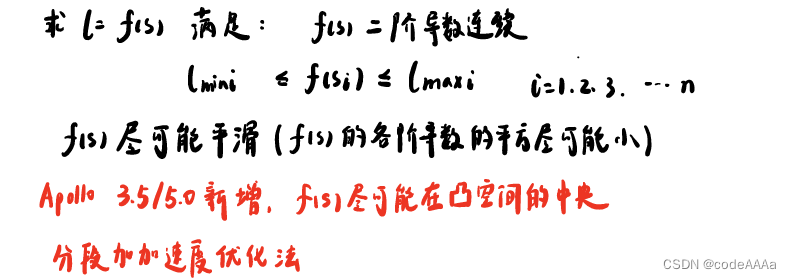
求解L = f(s)使用Apollo3.5中的算法——分段加加速優化算法:
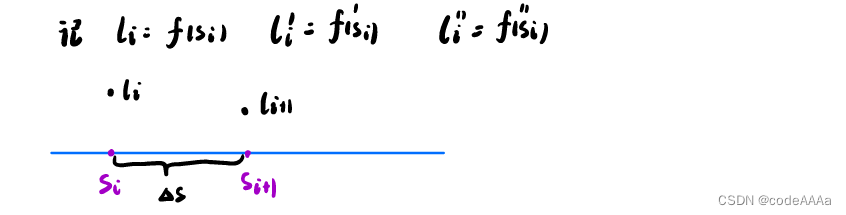

假設在f(s)的三階導數![]() 恒為一個常數,那么f(s)四階以上的導數都是0;
恒為一個常數,那么f(s)四階以上的導數都是0;
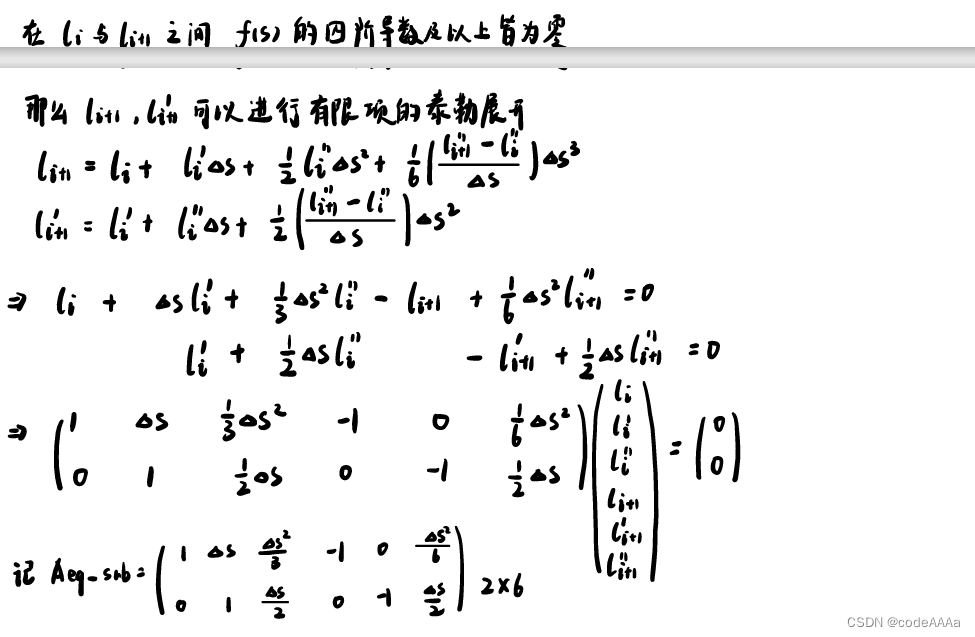

?上面的方程組就是二規劃的等式約束;除了對Li有等式約束,還有不等式約束,不等式約束主要就是L不能超過凸空間的范圍,如下:


![]()
這樣近似是安全的,大角度時只會把車估計大,而不是估計小,是一個比較安全的。
約束時:
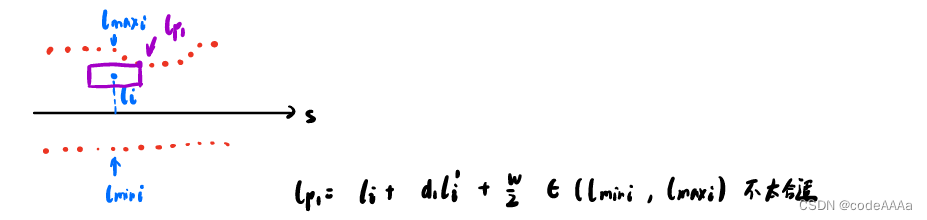
使用上面的約束方法不合適,因為上圖的Lp1已經碰到凸空間的邊界。需要做的保守一些,如下:
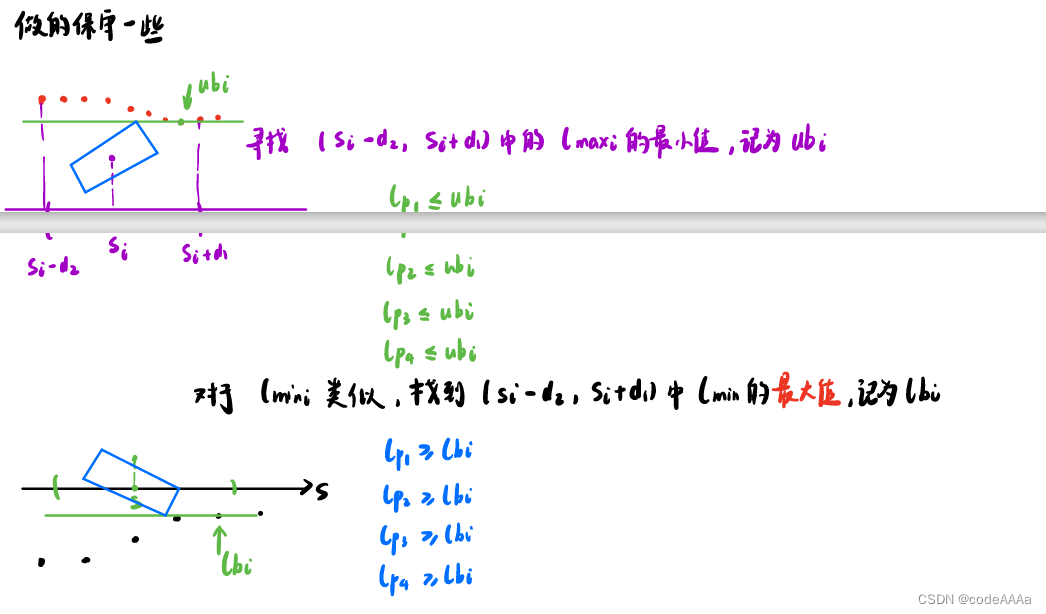
具體就是尋找車輛在凸空間上附近(si-d2,si+d1)所有lmaxi都囊括進來進行比較,選擇最小值,記未ubi,使得四個腳點都要小于它,對于lmini也進行近似的處理,找到(si-d2,si+d1)所有lmini中的最小值,是四個角點都小于它。
不等式約束可以寫成如下形式:

由上面可以推出總的不等式約束:

?二次規劃的等式約束和不等式約束都已經寫出來了,接下來就寫其cost function:









)




(非常詳細版))
)




