角速度傳感器和加速度傳感器是常見的慣性傳感器,常用于測量物體的旋轉和線性運動。
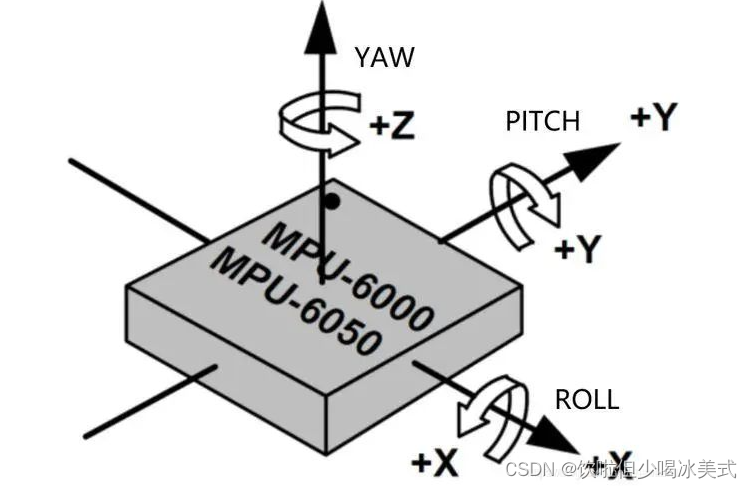
角速度傳感器(Gyroscope)用于測量物體繞三個軸(X、Y、Z)的旋轉速度或角速度。它可以提供關于物體在空間中的旋轉方向和角度變化的信息。
加速度傳感器(Accelerometer)用于測量物體在直線運動時的加速度。它可以提供關于物體在三個軸(X、Y、Z)上的線性加速度變化的信息。通過積分加速度數據,還可以估計物體的速度和位移變化。
這兩種傳感器廣泛應用于許多領域,包括無人機導航、運動追蹤、姿態控制、虛擬現實等。在使用這些傳感器時,通常需要了解其技術規格、工作原理以及數據解算方法,以便正確獲取并利用傳感器提供的數據。
MPU6050是一種常用的慣性測量單元(IMU),集成了三軸加速度計和三軸陀螺儀。它可以通過I2C總線與微控制器(如樹莓派)進行通信,并提供關于物體的加速度和角速度信息。
以下是MPU6050傳感器的一些特點和功能:
三軸加速度計:MPU6050具有內置的三軸加速度計,可提供物體在X、Y和Z軸上的加速度變化數據。這對于測量物體的線性運動和姿態控制非常有用。
三軸陀螺儀:MPU6050還具有內置的三軸陀螺儀,可提供物體繞X、Y和Z軸旋轉的角速度變化數據。這對于測量物體的旋轉和姿態控制同樣非常有用。
數字溫度傳感器:MPU6050還包含一個內置的數字溫度傳感器,可測量環境溫度。該傳感器可提供與芯片溫度相關的數據。
高精度測量:MPU6050提供16位的ADC分辨率,能夠實現高精度的加速度和角速度測量。
數字濾波器:MPU6050內置數字濾波器,可用于減小傳感器數據中的噪聲和干擾,提高數據質量。
樹莓派與MPU6050傳感器的使用相對簡單。下面是一些基本步驟:
-
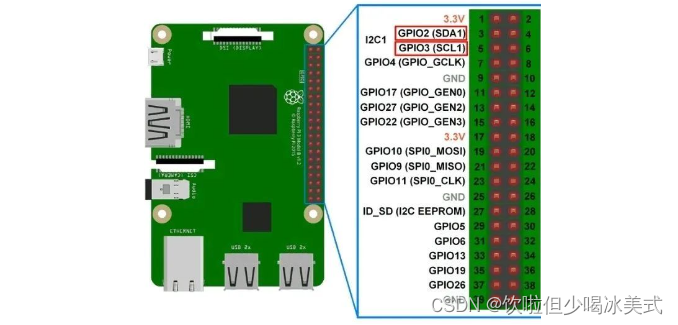
連接硬件:將MPU6050傳感器與樹莓派連接。MPU6050通常通過I2C總線進行通信,因此您需要將其SCL引腳連接到樹莓派的GPIO SCL引腳(通常是BCM 3)上,將其SDA引腳連接到樹莓派的GPIO SDA引腳(通常是BCM 2)上,并共享地線連接。
-
配置樹莓派:確保已啟用I2C功能。您可以使用
raspi-config命令來進行配置。選擇 "Interfacing Options",然后選擇 "I2C" 并啟用它。 -
安裝必要的軟件包:在樹莓派上安裝必要的軟件包來支持I2C通信和讀取MPU6050數據。執行以下命令來安裝相關軟件包:
sudo apt-get update
sudo apt-get install python-smbus
sudo apt-get install i2c-tools????????4.運行示例代碼:使用Python編寫代碼以讀取MPU6050傳感器的數據。可以使用Python的smbus庫來實現I2C通信。下面是一個簡單的示例代碼:
import smbus# 初始化I2C總線
bus = smbus.SMBus(1)# MPU6050的I2C地址
address = 0x68# 配置MPU6050
bus.write_byte_data(address, 0x6B, 0)# 讀取加速度計和陀螺儀數據
def read_sensor_data(reg):high_byte = bus.read_byte_data(address, reg)low_byte = bus.read_byte_data(address, reg + 1)value = (high_byte << 8) + low_byteif value > 32767:value -= 65536return valuewhile True:accel_x = read_sensor_data(0x3B)accel_y = read_sensor_data(0x3D)accel_z = read_sensor_data(0x3F)gyro_x = read_sensor_data(0x43)gyro_y = read_sensor_data(0x45)gyro_z = read_sensor_data(0x47)print("加速度計數據:X={0}, Y={1}, Z={2}".format(accel_x, accel_y, accel_z))print("陀螺儀數據:X={0}, Y={1}, Z={2}".format(gyro_x, gyro_y, gyro_z))






)








)
)

