在復雜天氣和低光照環境下,車牌識別系統的準確率和穩定性顯著下降,嚴重影響交通管理與智能監控的可靠性。本文針對霧霾天氣和夜間環境下車牌圖像特征模糊、對比度低、噪聲干擾嚴重的問題,提出了一種融合圖像增強與模板匹配的車牌識別方法。系統首先采用全局直方圖均衡去霧算法對輸入圖像進行預處理,以提升圖像對比度與邊緣清晰度;隨后利用投影分析與邊緣檢測相結合的方式進行車牌區域定位與矯正;在字符分割階段,通過歸一化模板匹配實現對漢字、字母及數字的逐類識別。為提升人機交互效果,系統還集成了語音播報模塊,實現車牌識別結果的實時語音輸出。實驗部分基于白天、夜間和霧霾條件下的多場景車牌樣本進行驗證,結果表明該系統在復雜環境下能夠保持較高的識別率和魯棒性,具備較強的實用價值與推廣潛力。
作者:張家梁(自研改進)
引言
隨著智能交通與智慧城市的發展,車牌識別技術已成為交通監控、道路收費、違章取證及車輛管理的重要支撐手段。傳統的車牌識別系統在光照充足、天氣良好的條件下能夠取得較高的識別精度,但在霧霾天氣、夜間低照度等復雜環境中,識別率顯著下降。這主要源于車牌圖像在惡劣環境下存在對比度不足、邊緣模糊、噪聲增強等問題,導致后續的車牌定位與字符識別環節難以實現穩定的效果。
近年來,學者們針對復雜環境下的車牌識別提出了多種改進方法,如基于深度學習的端到端識別模型、圖像增強預處理方法以及多模態信息融合技術。然而,深度學習模型通常對訓練樣本規模和計算資源依賴較大,在資源有限或特定環境數據不足的情況下,其泛化能力存在一定局限。因此,探索結合傳統圖像處理與模板匹配的輕量化方法,仍具有實際應用價值。
本文設計并實現了一套“霧霾天氣+夜間車牌識別系統”。該系統以圖像增強為核心,通過全局直方圖均衡去霧算法提升圖像清晰度,并結合邊緣檢測與投影分析實現車牌區域定位。字符識別部分采用歸一化模板匹配方法,對漢字、字母及數字進行分類識別。為提升用戶體驗,系統還引入語音播報功能,實現車牌號的實時語音輸出。最后,通過白天、夜間和霧霾三類環境下的數據集對系統進行了驗證,實驗結果表明該方法在復雜環境中依然保持了較高的識別準確率和穩定性。
綜上,本文的研究不僅為惡劣天氣與低光照條件下的車牌識別提供了有效解決方案,也為實際交通管理和智能監控的可靠運行提供了技術支撐。
系統架構
1.系統概述
本系統基于 MATLAB 平臺,面向霧霾天氣與夜間低照度條件下的車牌圖像識別實驗設計,主要實現對車牌圖像的讀取、預處理、車牌定位與矯正、字符分割與模板匹配識別,并通過 GUI 界面與語音播報實現交互式輸出與結果展示。系統由 參數設置模塊、數據讀入模塊、圖像預處理模塊、車牌定位與矯正模塊、字符分割與識別模塊、結果展示與交互模塊 構成。
參數設置模塊:
初始化系統關鍵參數,包括車牌圖像輸入路徑、圖像增強選項(去霧/對比度增強)、字符模板路徑、語音播報開關等,確保后續處理流程統一化、可控化。
數據讀入模塊:
支持用戶通過文件選擇對話框加載白天、夜間及霧霾條件下的車牌圖像,自動校驗文件格式,并在 GUI 界面中顯示原始輸入圖像,方便用戶直觀對比后續處理效果。
圖像預處理模塊:
針對不同場景圖像執行增強與標準化操作:霧霾圖像采用全局直方圖均衡去霧算法提升對比度,夜間圖像通過亮度/對比度調節改善可見性;隨后統一進行灰度化與噪聲抑制處理,增強字符邊緣特征,為后續定位與識別提供高質量輸入。
車牌定位與矯正模塊:
結合邊緣檢測與投影分析實現車牌區域的自動定位,并通過形態學處理剔除干擾區域;對傾斜或透視畸變的車牌執行幾何矯正,保證字符排列的水平性與規則性。
字符分割與識別模塊:
采用投影分割與連通域分析對矯正后的車牌區域進行字符切分,并對分割后的字符執行歸一化處理;隨后調用模板匹配方法分別對漢字、字母與數字進行識別,并結合規則校驗機制(車牌長度、類別位約束)提升整體識別準確率。
結果展示與交互模塊:
在 GUI 界面直觀展示輸入車牌圖像、識別結果與處理步驟,并集成語音播報功能,調用相應的省份簡稱、字母和數字語音模板,實現識別結果的實時播報。同時支持輸出日志文件,便于后續性能評估與系統調試。
系統設計目標 是實現一個 完整、可復現、可擴展的車牌識別實驗平臺,既能用于復雜環境下車牌識別方法的研究與性能對比實驗,也可作為 計算機視覺課程教學與智能交通應用開發 的參考工具。
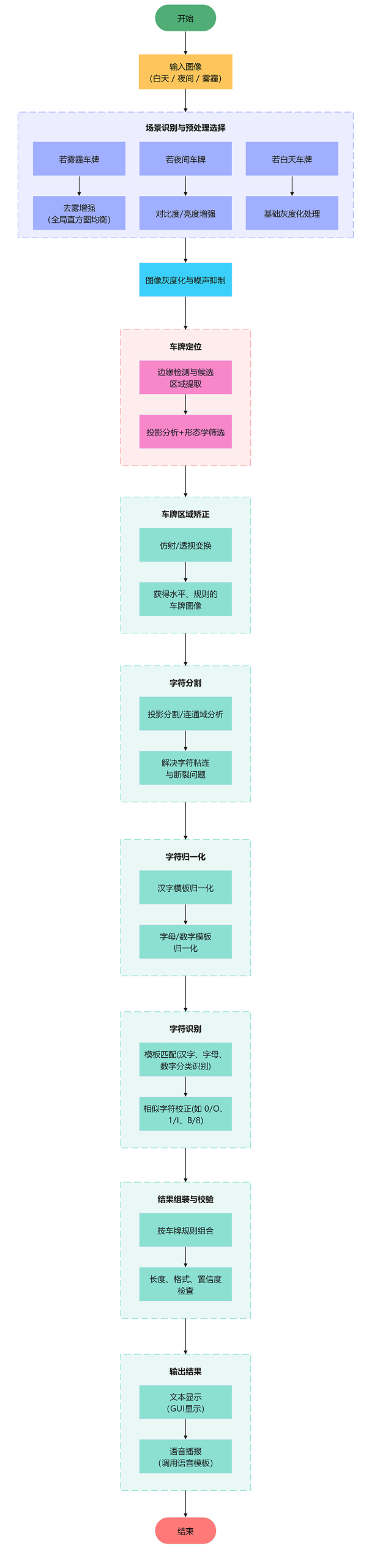
2.系統流程圖
研究方法
本研究采用“圖像增強—車牌定位—幾何矯正—字符分割—模板匹配識別—結果輸出”的處理流程,在霧霾與夜間復雜環境下實現車牌的自動識別與語音播報。
實驗結果
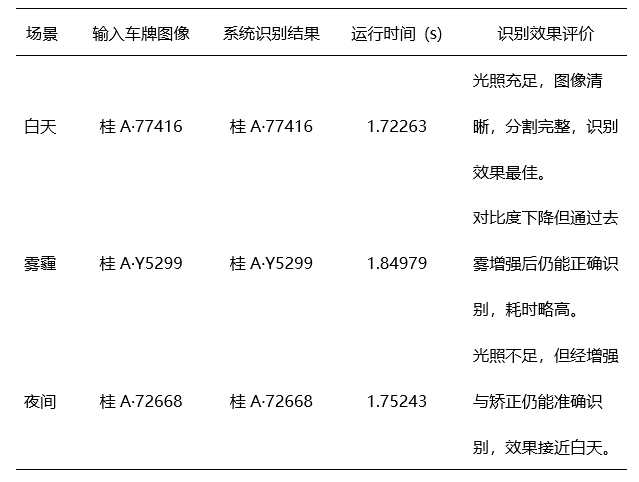
實驗結果表明:本系統在白天、霧霾和夜間三類典型環境下均能實現較高的車牌識別準確率,其中白天場景識別效果最佳,霧霾場景通過去霧增強保持了較高魯棒性但耗時略長,夜間場景在光照不足條件下依然能夠穩定識別,說明所設計的方法具有較強的適應性與實用價值。
運行main_rec.m
圖1 基于MATLAB的白天車牌識別系統

分析:白天條件下光照充足、圖像清晰,系統能夠快速準確地識別車牌字符(桂A·77416),識別效果最佳。
圖2 基于MATLAB的霧霾車牌識別系統
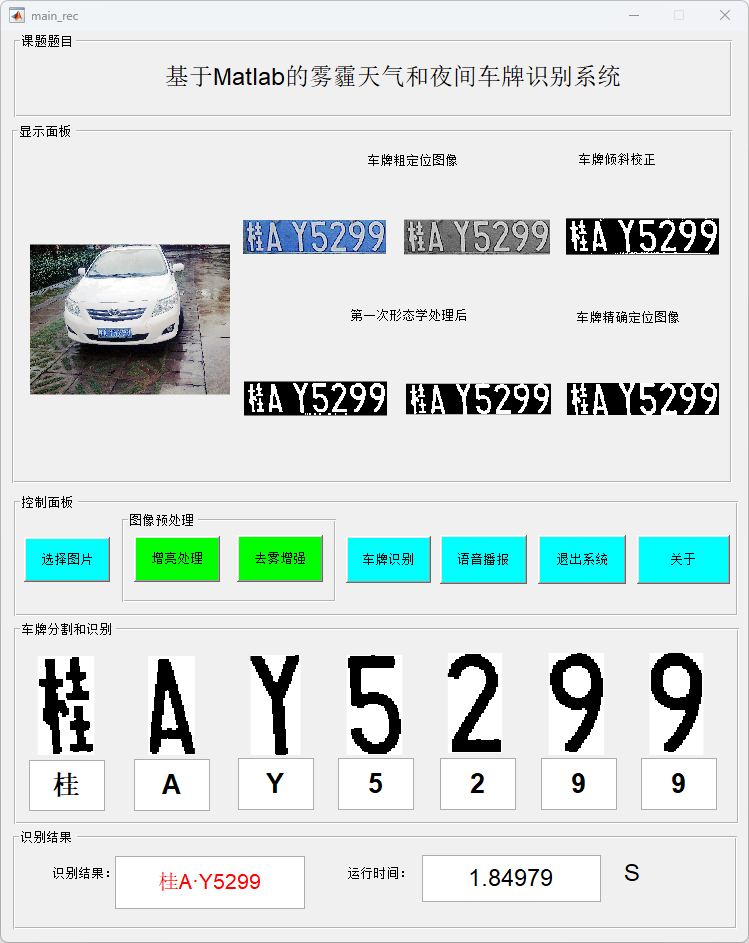
分析:在霧霾環境下,系統通過去霧與形態學增強仍能準確識別車牌 桂A·Y5299,但處理耗時略高于白天場景。
圖3 基于MATLAB的夜間車牌識別系統

分析:在夜間低光照環境下,系統通過增強與矯正依然能夠準確識別車牌 桂A·72668,識別精度較高,運行時間適中。
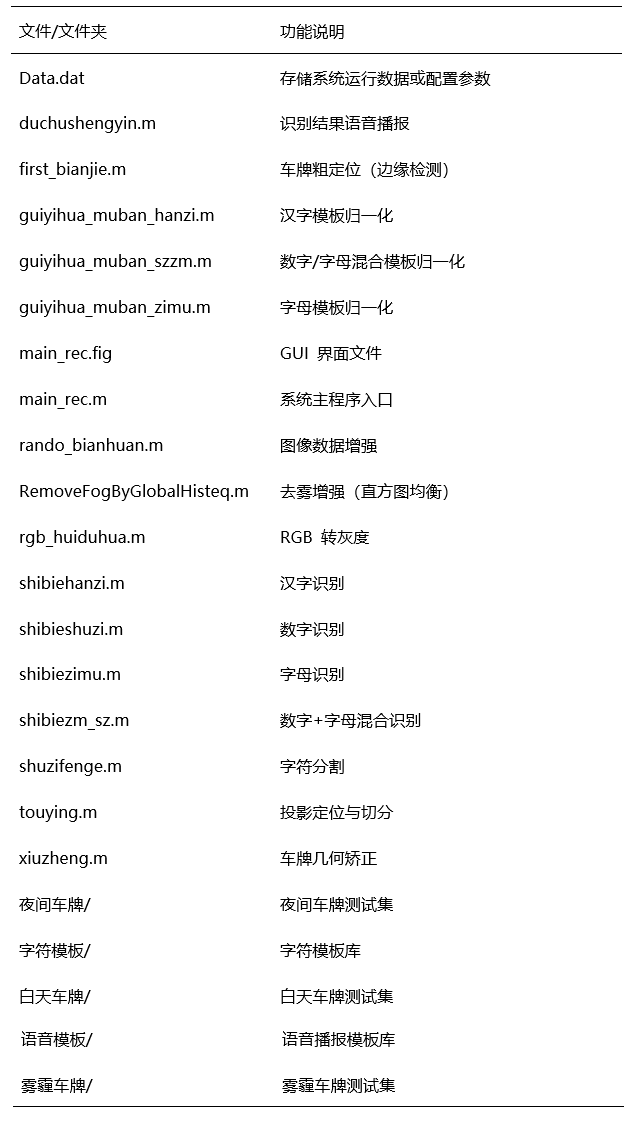
系統實現
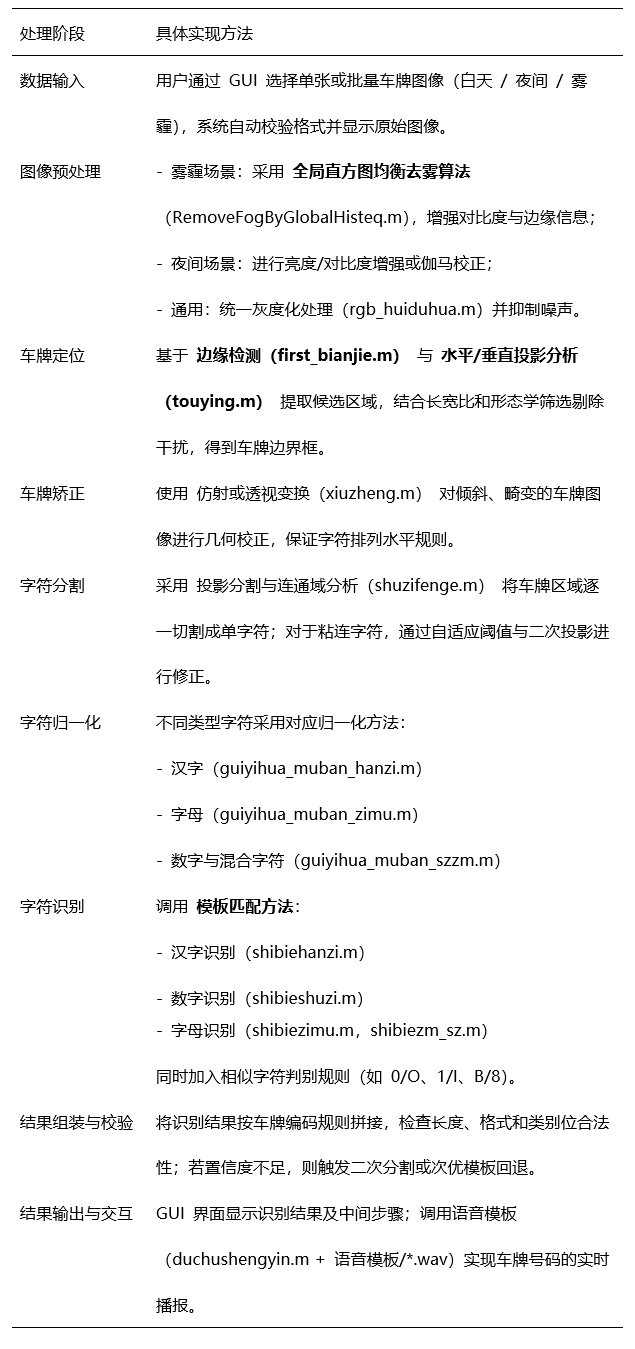
本系統完全基于MATLAB平臺開發,主要集成以下腳本與模塊:
研究結論
本研究設計并實現了一套基于 MATLAB 的車牌識別系統,針對白天、霧霾和夜間等復雜環境下圖像質量差異,提出了結合圖像增強、車牌定位與矯正、字符分割及模板匹配的處理流程。實驗結果表明,系統在三類場景下均能夠準確識別車牌號碼,其中白天條件下識別效果最佳,霧霾和夜間場景通過增強與形態學處理也保持了較高的準確率和魯棒性。總體而言,該系統具有較好的可復現性與擴展性,不僅為智能交通中復雜環境下的車牌識別提供了有效技術途徑,也可為后續研究和應用推廣奠定基礎。
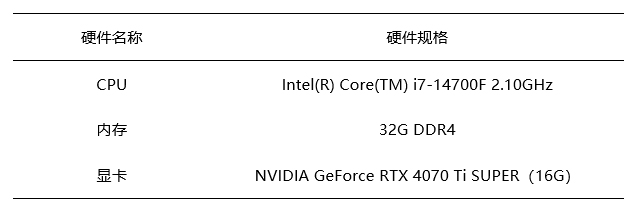
實驗環境
硬件配置如表:實驗所用硬件平臺為惠普(HP)暗影精靈10臺式機整機,運行 Windows 11 64 位操作系統,作為模型訓練與測試的主要計算平臺,能夠良好支持Matlab的開發需求。
官方聲明
實驗環境真實性與合規性聲明:
本研究所使用的硬件與軟件環境均為真實可復現的配置,未采用虛構實驗平臺或虛擬模擬環境。實驗平臺為作者自主購買的惠普(HP)暗影精靈 10 臺式整機,具體硬件參數詳見表。軟件環境涵蓋操作系統、開發工具、深度學習框架、MATLAB工具等,具體配置詳見表,所有軟件組件均來源于官方渠道或開源社區,并按照其許可協議合法安裝與使用。
研究過程中嚴格遵循學術誠信和實驗可復現性要求,確保所有實驗數據、訓練過程與結果均可在相同環境下被重復驗證,符合科研規范與工程實踐標準。
版權聲明:
本算法改進中涉及的文字、圖片、表格、程序代碼及實驗數據,除特別注明外,均由7zcode.張家梁獨立完成。未經7zcode官方書面許可,任何單位或個人不得擅自復制、傳播、修改、轉發或用于商業用途。如需引用本研究內容,請遵循學術規范,注明出處,并不得歪曲或誤用相關結論。
本研究所使用的第三方開源工具、框架及數據資源均已在文中明確標注,并嚴格遵守其相應的開源許可協議。使用過程中無違反知識產權相關法規,且全部用于非商業性學術研究用途。








Linux Journalctl命令、Journalctl日志持久化存儲)


實戰二十二——指紋圖像中提取特征點,計算兩兩指紋之間的相似度)







