這里對當前Lidar中的一些常見問題進行專項論述。首先以禾賽Lidar為例,列出相關參數,以備論述。


1、Lidar的線束是什么,由什么決定?
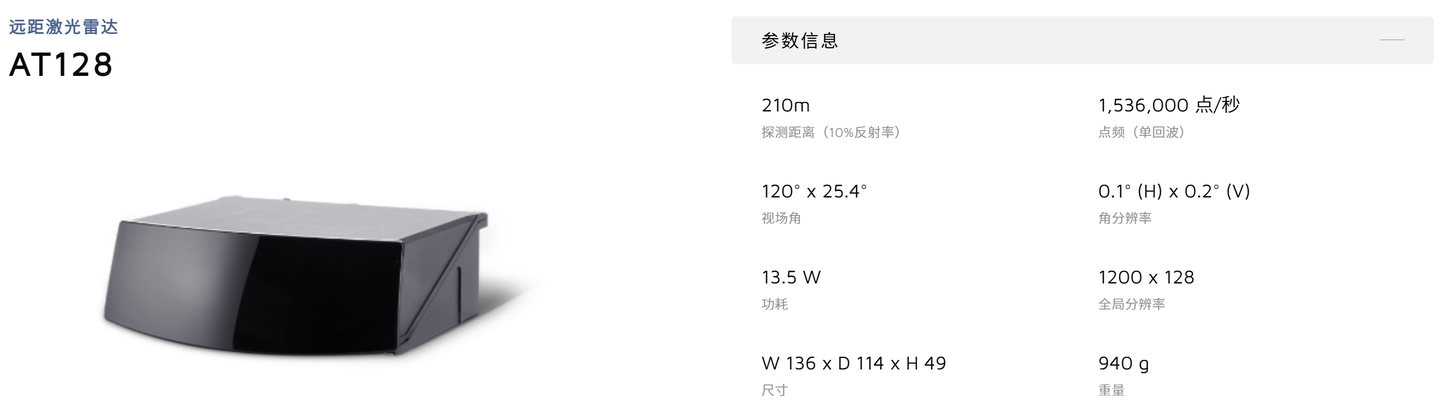
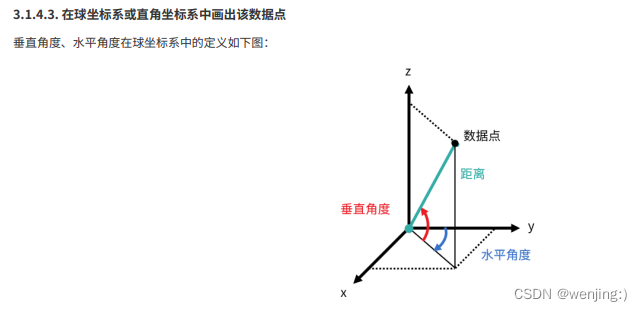
以AT128為例,該型號中的128即指128線,將垂直視場角(VFOV)進行128線劃分,對應于垂直向分辨率:
-
從圖1中的禾賽AT128參數可以看到,其VFOV為25.4°,垂直分辨率為0.2°,25.4/0.2=127,等同于對應128線;
-
從圖1中的禾賽AT360參數可以看到,其VFOV為18°,垂直分辨率為0.05°,18/0.05=360,等同于對應360線;
-
從圖1中的禾賽AT1440參數可以看到,其VFOV為18°,垂直分辨率為0.0125°,25.4/0.2=1440,等同于對應1440線;
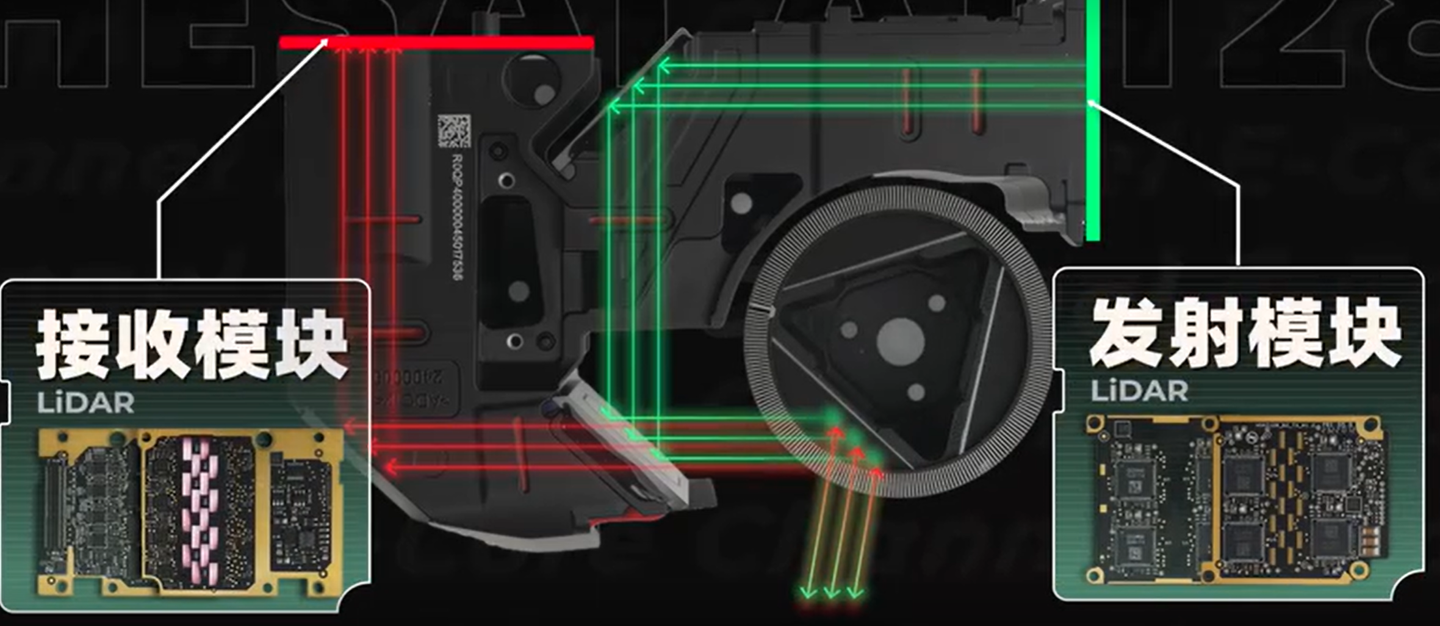
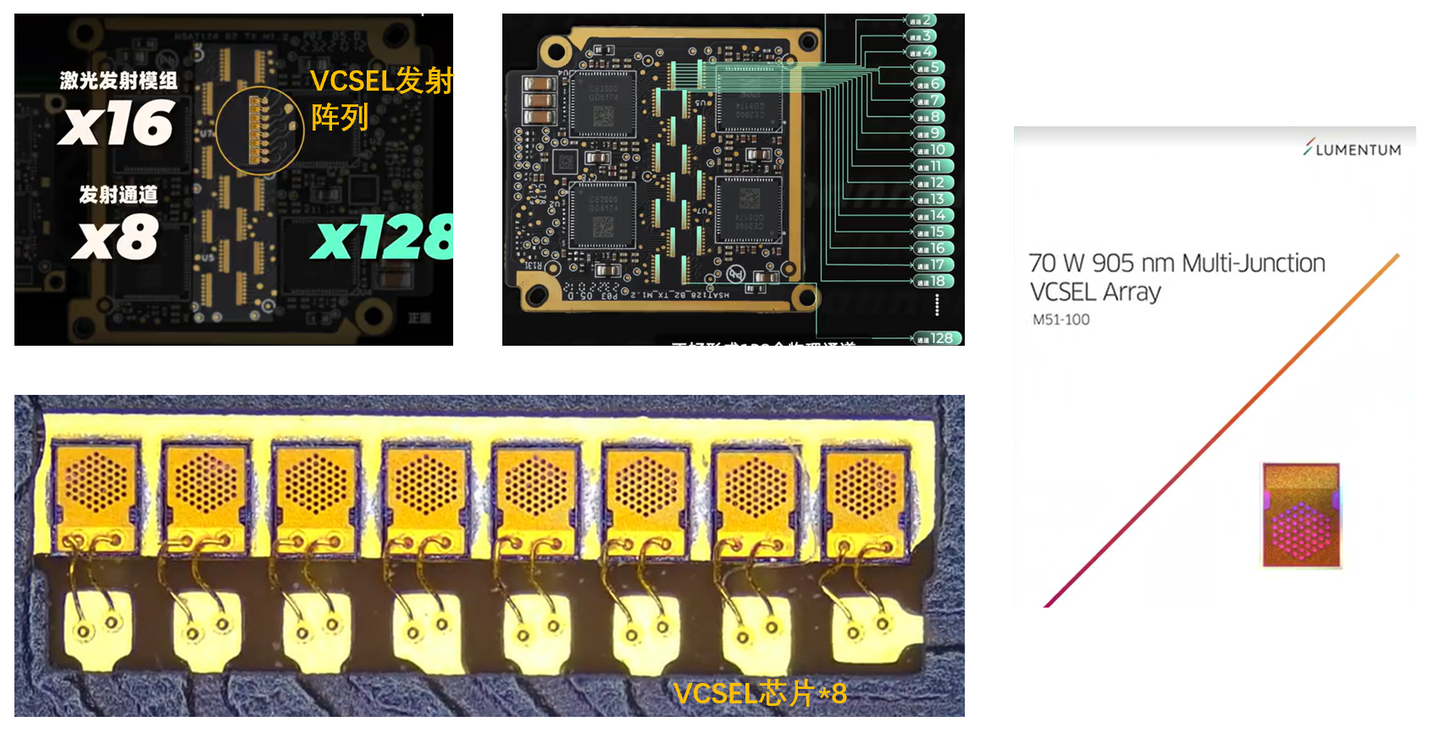
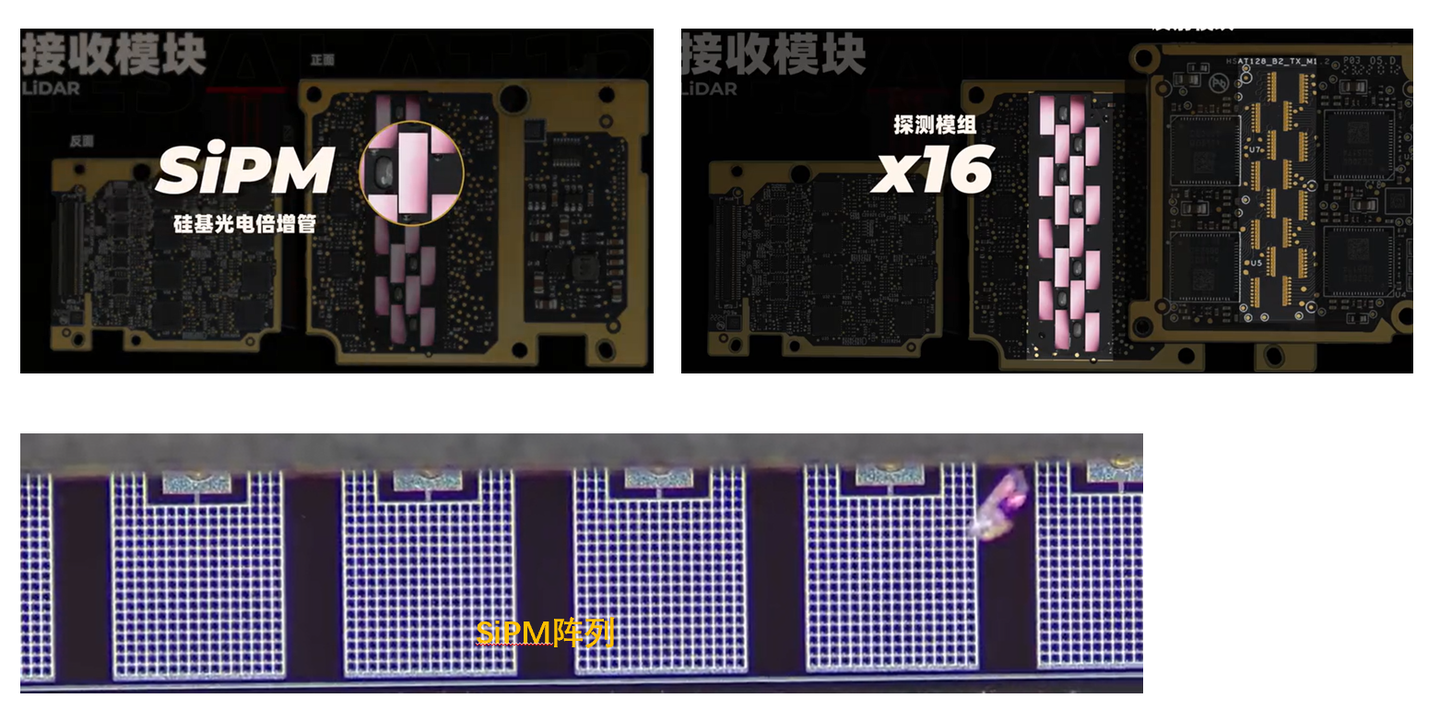
AT128內部設計如下:128個發射通道對應128個接受通道,從而形成了VFOV上的128線分辨率。
速騰M1采樣的是另外一種方式,所以速騰M1是等效128線。通過振鏡垂直向的可控擺動,實現了等效的128個垂直向的分割掃描,從而實現了等效128線。
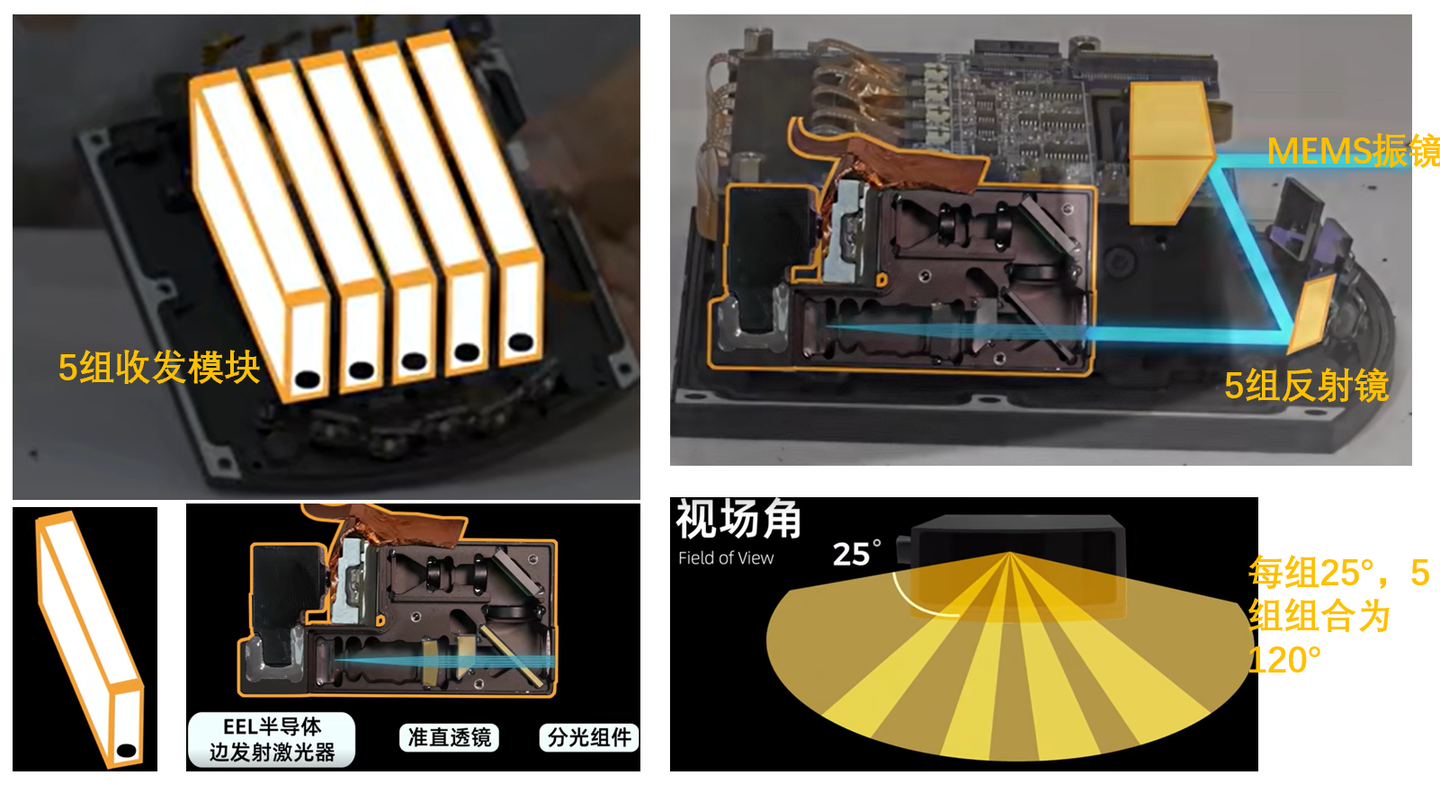

如上圖所示,水平測角通過振鏡水平向的擺動,由于振鏡水平向擺動角度有限,所以用5組反射鏡,進行拼接,實現水平120°的覆蓋,垂直測角通過振鏡垂直向的擺動完成,實現垂直向25°的覆蓋。
M1的水平和垂直角分辨率均為0.2°,點頻為每秒78.7萬。垂直方案差不多等同于128線的AT128。
2、Lidar的量程是什么,由什么決定, 最大量程以及10%反射率量程是什么?
激光掃描中的“10%反射率”是指激光掃描測距產品在特定條件下能夠測量的最大距離的一個參數。
定義:反射率是指物體表面反射光線的能力,而“10%反射率”則是指物體表面反射的激光能量占入射激光能量的10%。 這是一個標準化的測試條件,用于衡量激光掃描測距產品的性能。
應用場景:在激光掃描測距中,當被測物體的反射率為10%時,該激光掃描測距產品能夠測量的最大距離為30米。 這意味著,如果被測物體的反射率高于10%,那么該產品可能能夠測量更遠的距離;反之,如果反射率低于10%,則測量距離可能會縮短。
重要性:了解激光掃描測距產品的反射率參數對于正確使用和評估產品性能至關重要。

Lidar校準專用漫反射板技術要求:
-
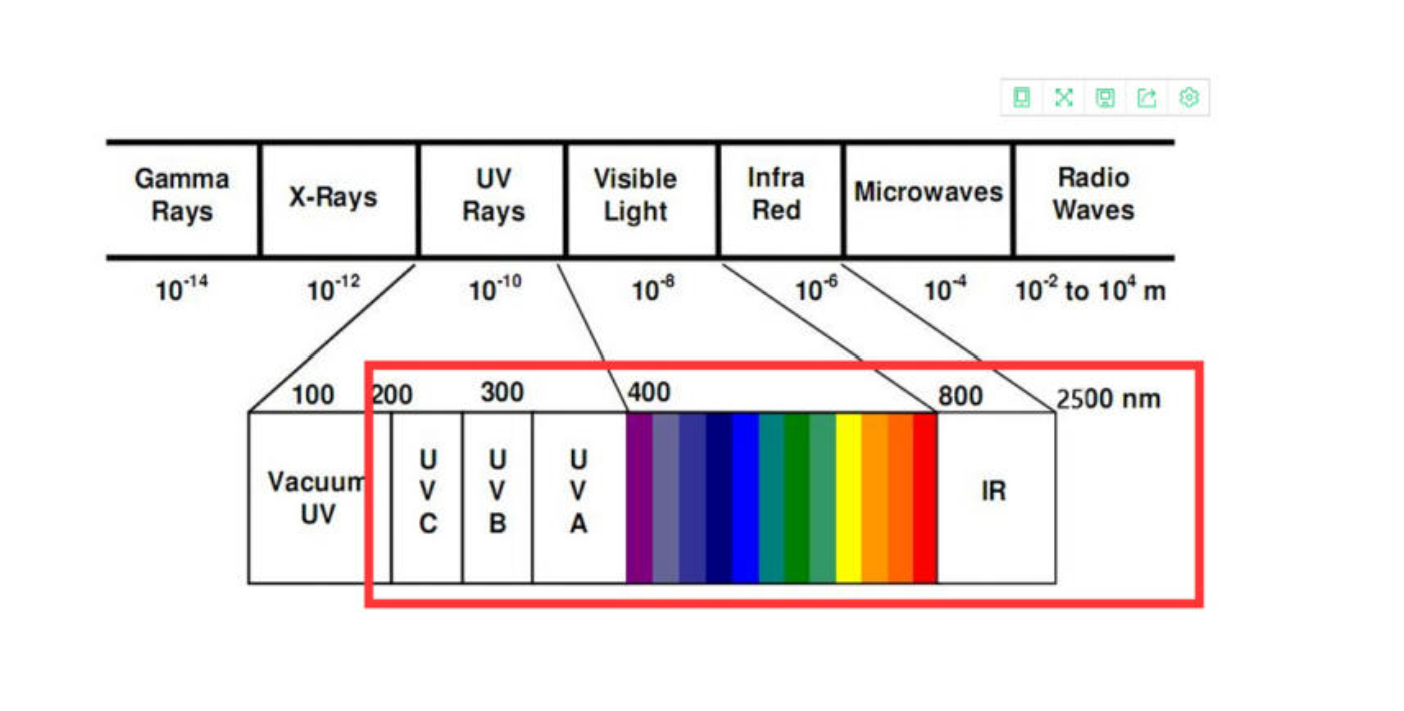
使用寬200-2500nm的波長,可以在850nm、905nm、940nm、1550nm的普通激光器中應用。
-
反射率為2-99%可選,光譜圖平坦。
-
具有接近完美的朗伯特性。
-
具有良好的漫射性測試效果。
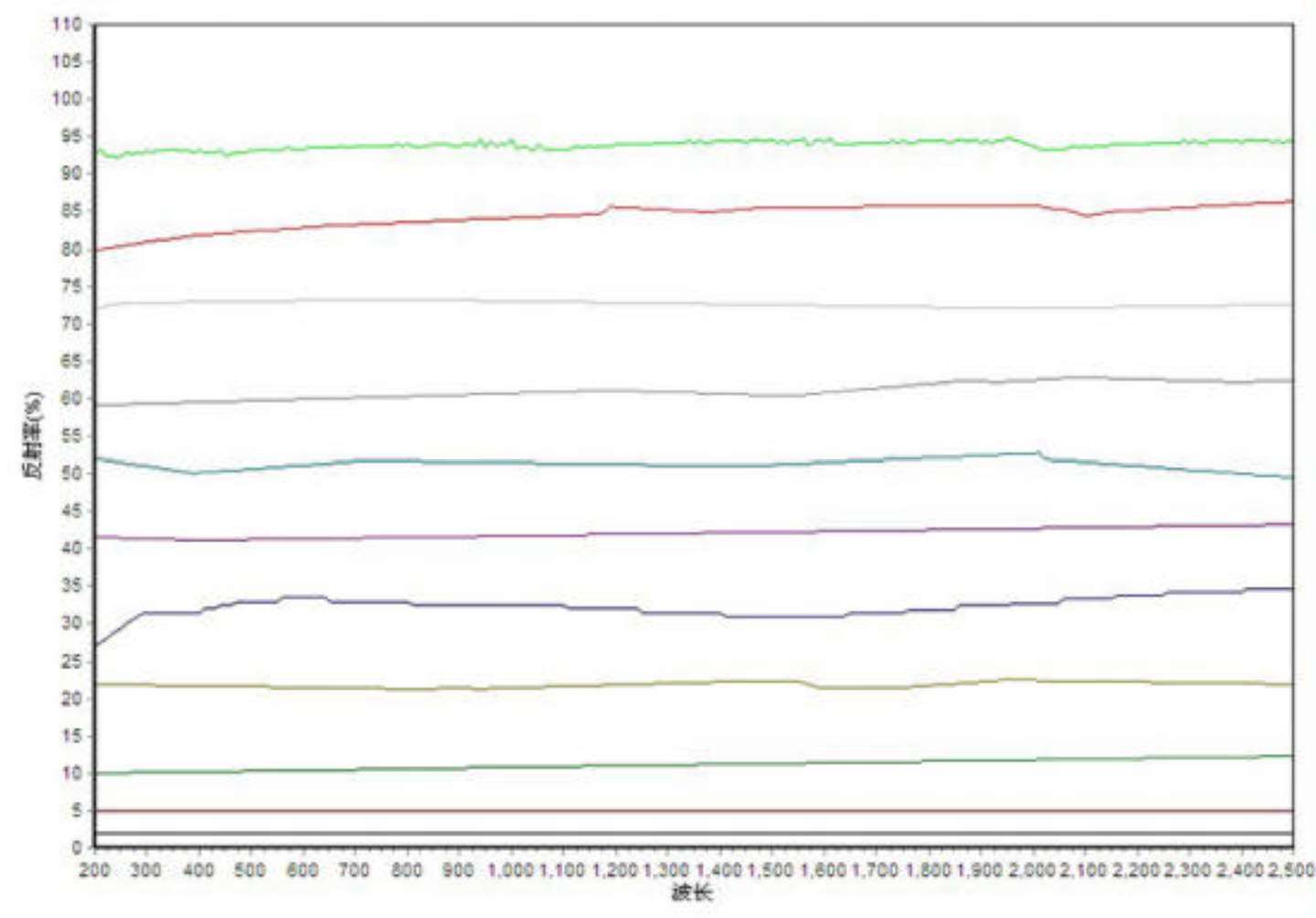
光譜反射率的補充:
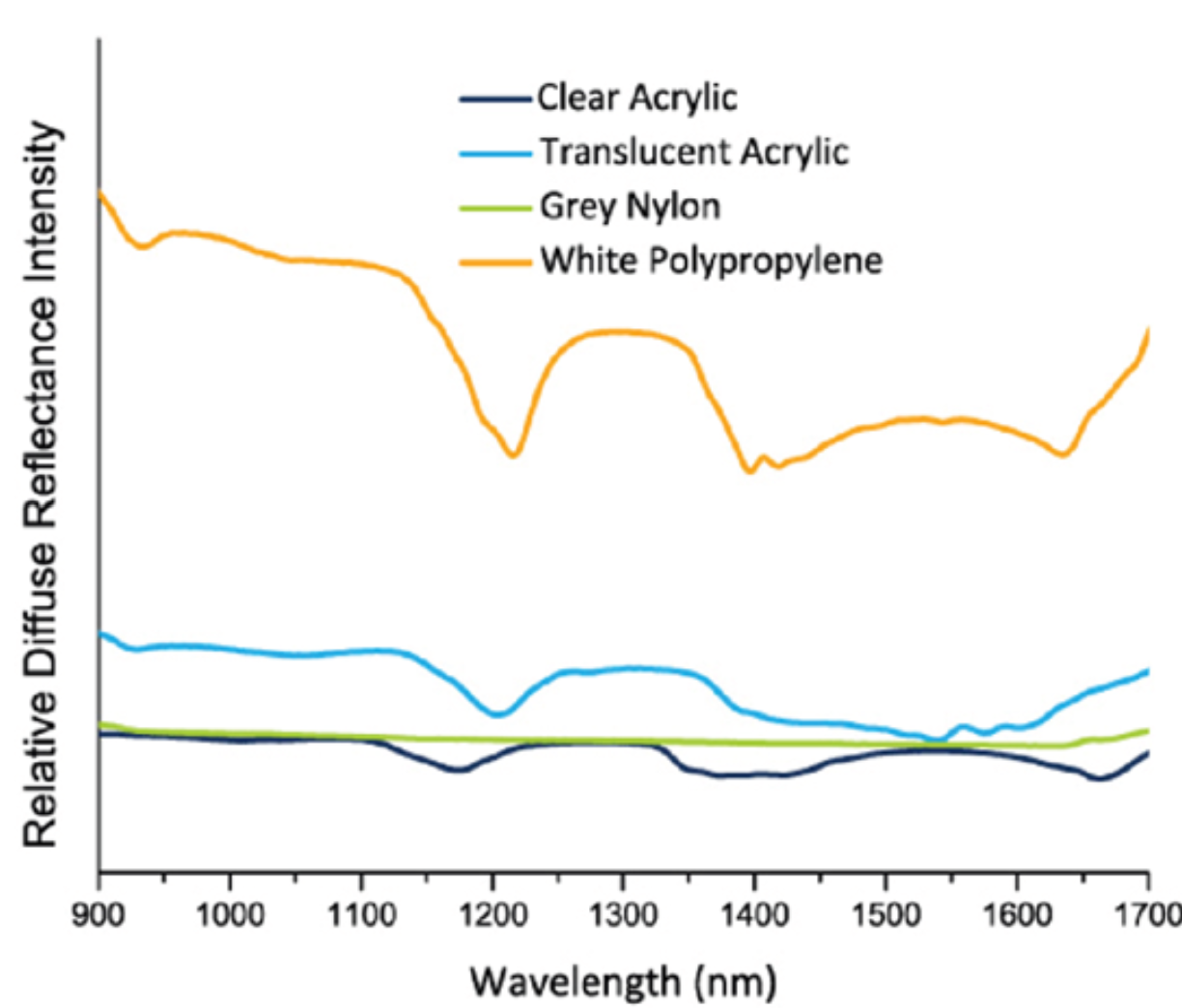
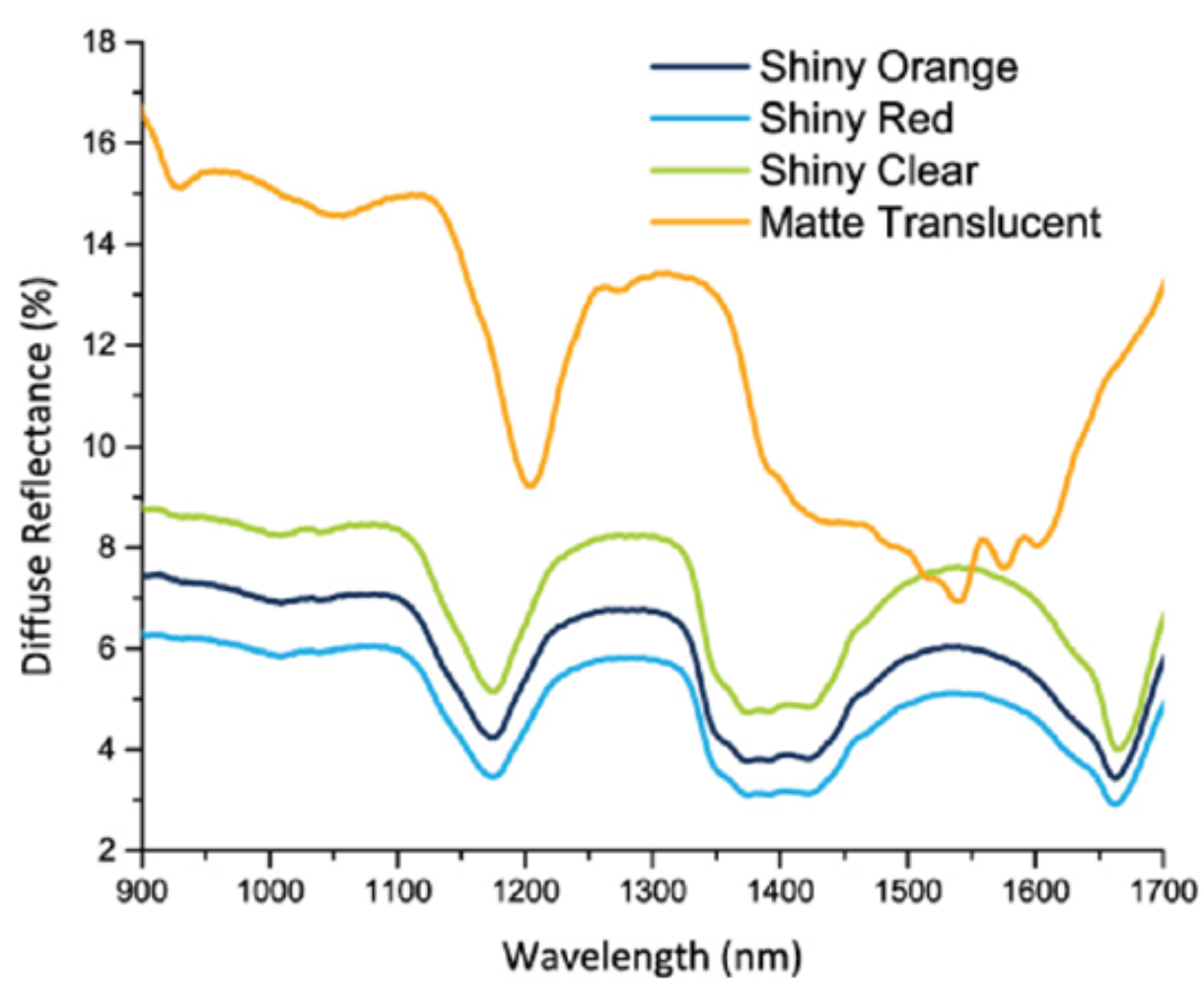
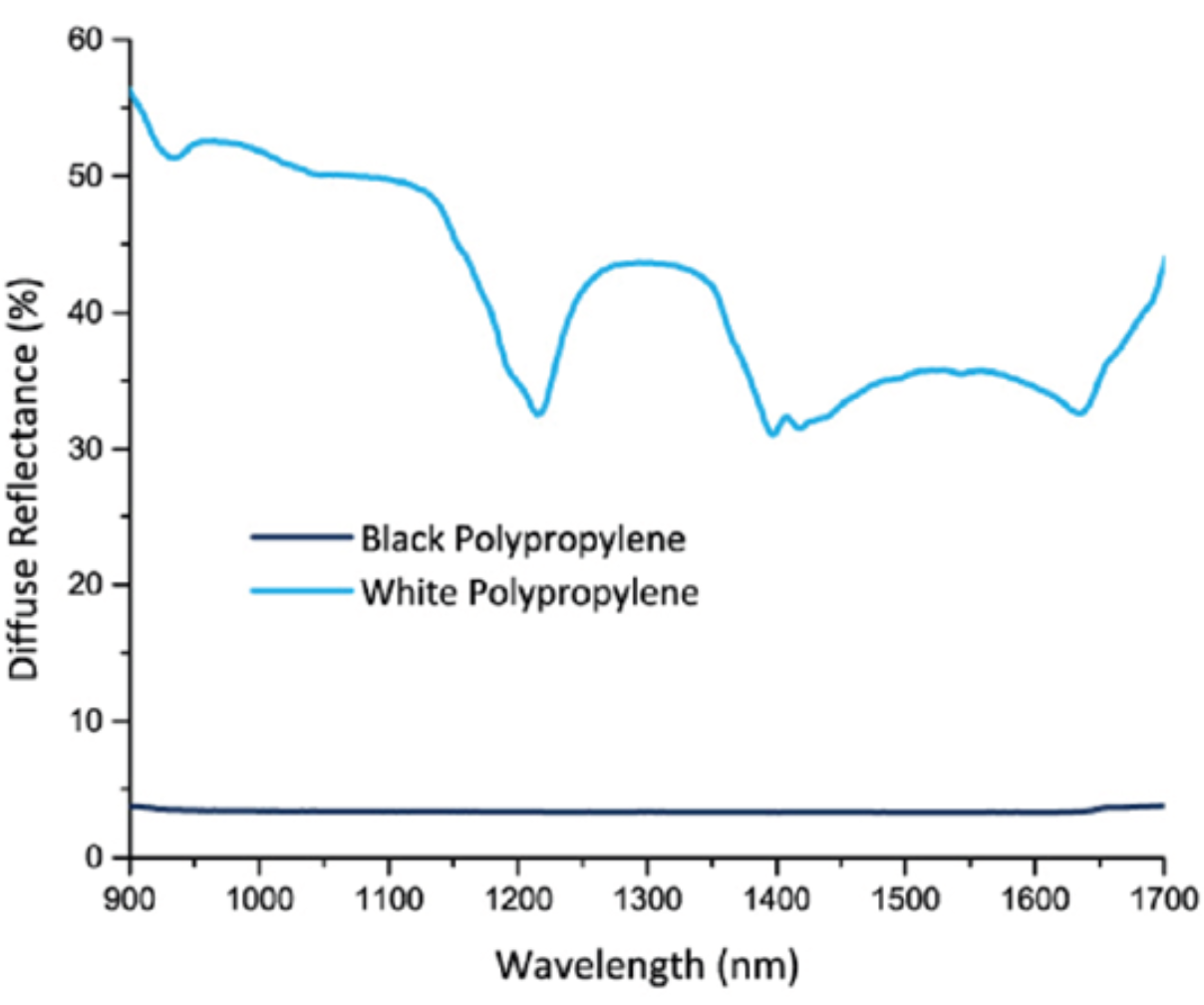
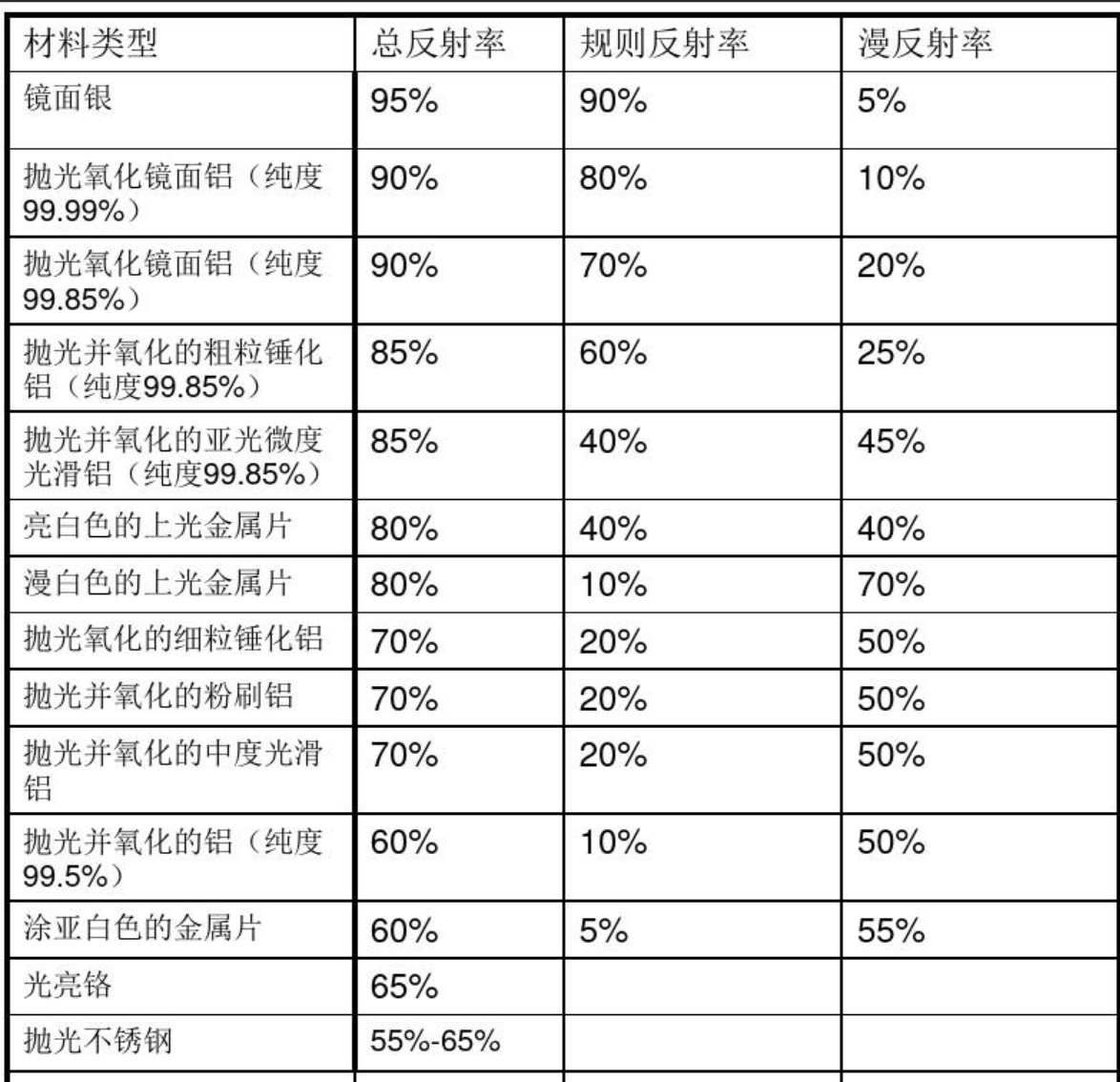
反射率匯總表可以參考下文
Ref:https://www.jstage.jst.go.jp/article/jieij1917/27/10/27_10_449/_pdf/-char/ja
以AT128為例,探測距離210m@10%反射率,即探測10%反射率的標準目標板可以達到210m,
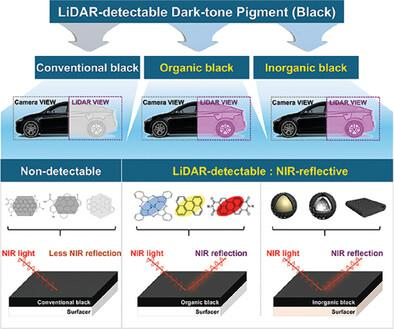
在自動駕駛中還存在以下研究:為自動駕駛設計具有高近紅外反射率的 LiDAR 可檢測暗色調材料
自動駕駛依賴于使用LiDAR技術對物體的精確識別,該技術在 905 nm 的特定波長下運行。黑色物體,例如用于車輛涂層的炭黑,往往會顯著吸收這種特定波長,這限制了 LiDAR 傳感器的性能。為了解決這個問題,研究人員探索了創造可以被 LiDAR 檢測到的暗色調材料,具有高 NIR 反射率,同時保持真正的黑色(基于 CIE 顏色坐標的L* < 20)。這些材料分為兩類:有機顏料和無機顏料。有機顏料可以通過操縱其官能團進行合成調整以實現真正的黑色,但實現高 NIR 反射率仍然具有挑戰性,通常需要具有 NIR 反射白色基底的雙層結構和上層有機黑色顏料。此外,對疏水添加劑的需求和對陽光降解的抵抗性進一步限制了它們的使用。對于無機顏料,可以通過仔細控制其成分、結構和形態來獲得所需的 LiDAR 可檢測特性,從而允許具有適當設計的單層涂層。
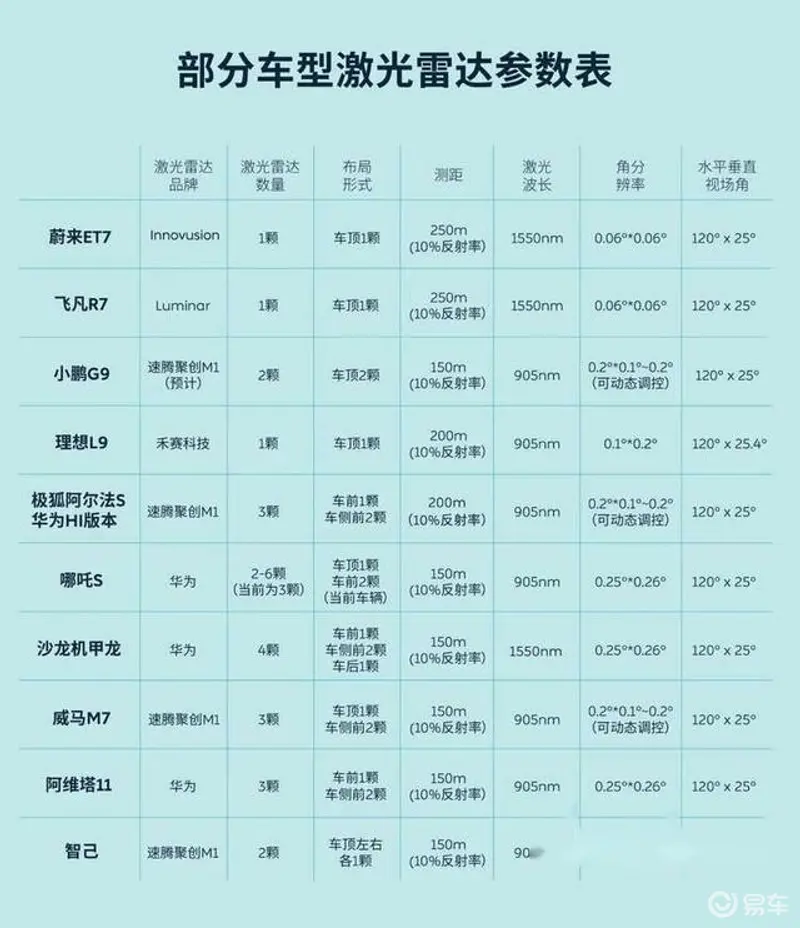
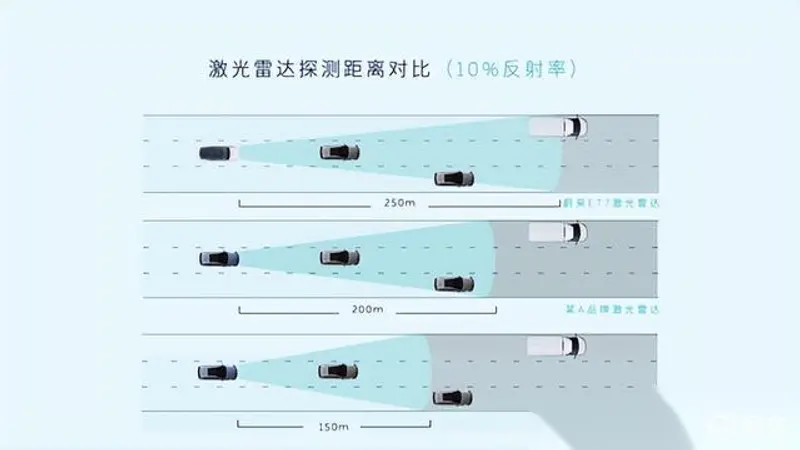
10%的反射率下,以蔚來ET7為例,搭載了來自Innovusion的超遠距高精度激光雷達,最遠探測距離可達500米,10%反射率標準下的探測距離可達250米,留給車輛預判制動的時間非常長。一般的車型在10%的反射率的條件下,只能做到100-200米的探測距離,留給行車電腦的預判時間很緊張。
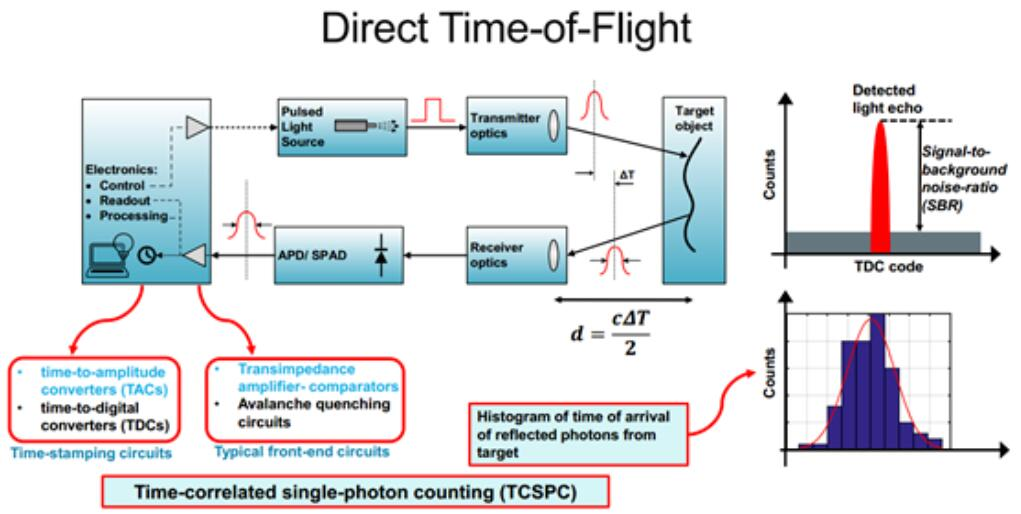
以上就說明了Lidar量程的重要性,工作在dToF模式下的Lidar,其量程和Tx功率以及Rx的接受靈敏度強相關
下面的公式是采用不同的光子檢測器得到的最大探測距離計算公式。
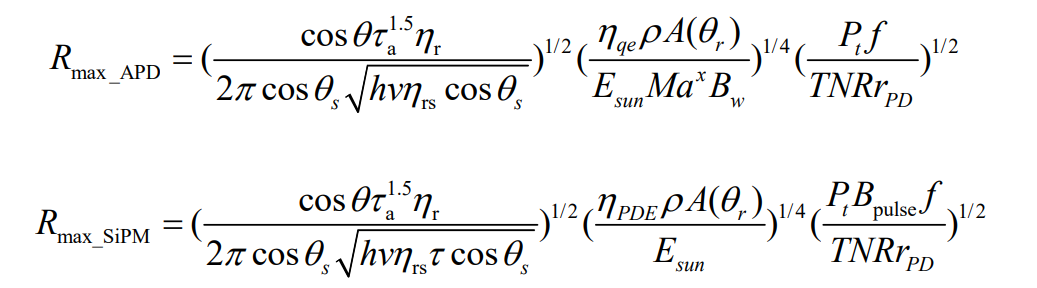
顯然,提高量子效率𝜂(qe)或光子探測效率𝜂(PDE)(當前行業水平下𝜂(qe)約為80%,𝜂(PDE)約為20%)、增加接收孔徑𝐴(𝜃r)、提高目標反射率𝜌、減少太陽輻射𝐸(sun)、降低APD的過量噪聲因子𝑥,都可以增強DToF激光雷達的最大范圍。因此,在調整設計參數時,可以使用上述方程計算𝑅(max)相對于這些設計參數的偏導數,以更好地平衡成本和性能收益,并選擇最佳設計方案。降低閾值-噪聲比(TNR)的設定值也可以增加探測范圍,但代價是增加誤報率和點云中的噪聲點。可以根據場景中實際的點云效果進行具體調整。增加發射光的峰值功率𝑃?并減少接收視場角 𝑟(pd)/𝑓 也可以改善最大范圍,前提是遵守激光安全法規(人眼安全)。然而,重要的是要注意到,增加峰值功率將由于激光安全法規而減少脈沖寬度。這就需要增加接收電路的帶寬 𝐵w,進而導致噪聲和成本的增加。因此,激光峰值功率、發散角、接收視場角和電路帶寬的設計需要基于最大范圍公式、安全法規、設備特性和成本進行全面考慮。
下文是對Ranging Performance Analysis in Automotive DToF Lidars進行論述的,有興趣可以參考:
Ref:https://arxiv.org/pdf/2501.17884
下圖是禾賽的ETX Lidar的自研芯片提出探測距離。

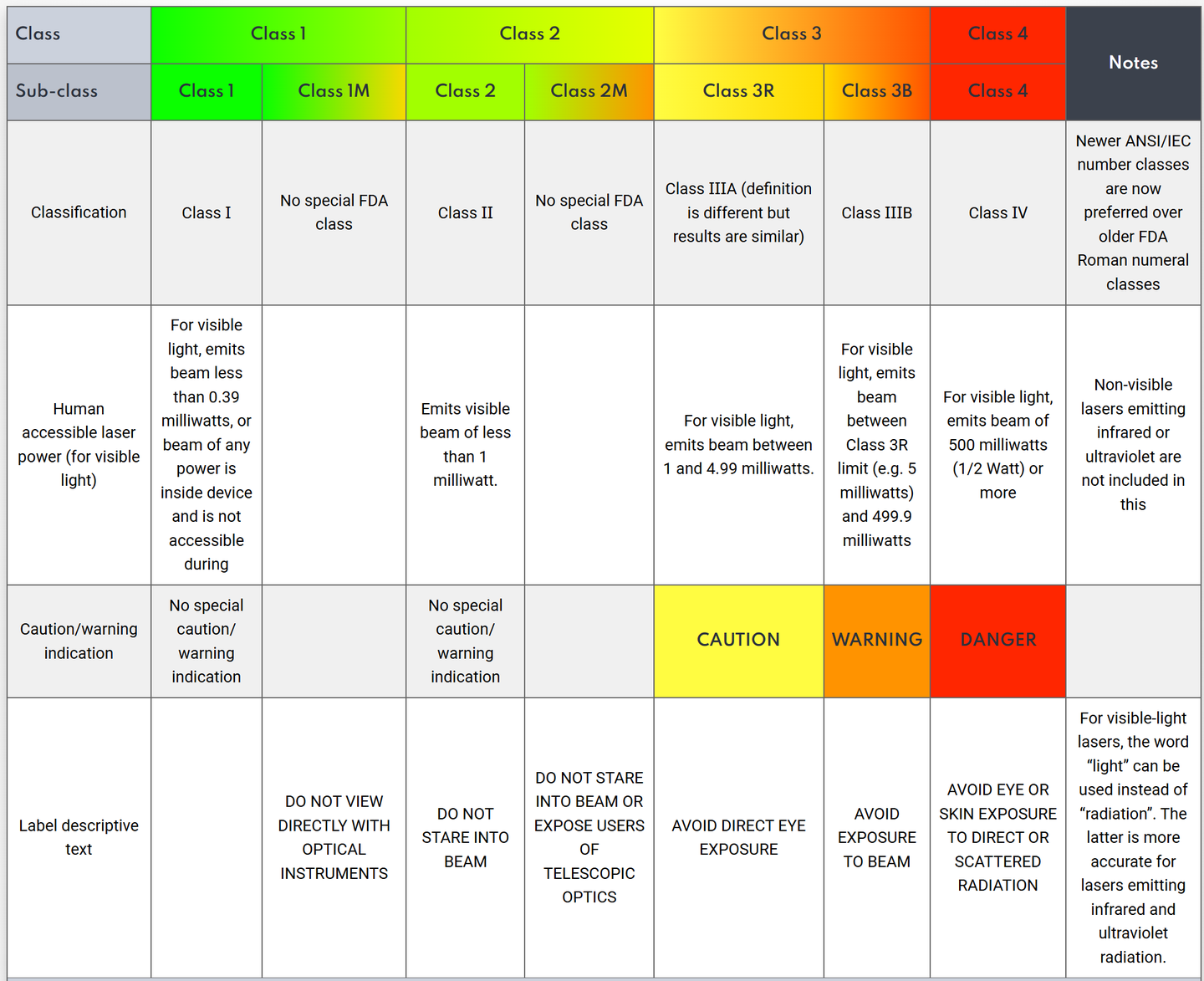
3、Lidar的人眼安全等級說明
人眼安全的要求如下
中國要求:目前激光人眼安全在國內沒有強制性認證要求,但有強制性標準GB 7247.1,國內上市激光產品需滿足激光人眼安全要求。需要注意的是GB 7247.1采標IEC 60825-1。
美國要求:激光產品進入美國需要滿足FDA輻射放射的要求。除了限值激光產品的設計和結構上滿足人眼激光安全要求。制造商還要能保證良好生產規范使得批量產品持續滿足要求。FDA通過產品型式試驗+企業質量控制系統要求的方式,要求制造商進行首次報告和年度報告。測試標準可以為21 CFR 1040.10,也可以為IEC 60825-1+Notice 56差異。
其他國家:國際上包括歐洲和其他主要地區均可采用IEC 60825-1(但須注意歐盟EN 60825-1有A11增補,以及需要考慮消費類激光要求EN 50689)。
共同要求:由于激光雷達大多采用905nm和1550nm,均為不可見紅外激光,發射過程中不易被用戶察覺,并工作場景均為需向外界發射激光輻射,所以均需滿足一類激光(Class 1)激光人眼安全要求。
Ref:激光雷達人眼安全認證
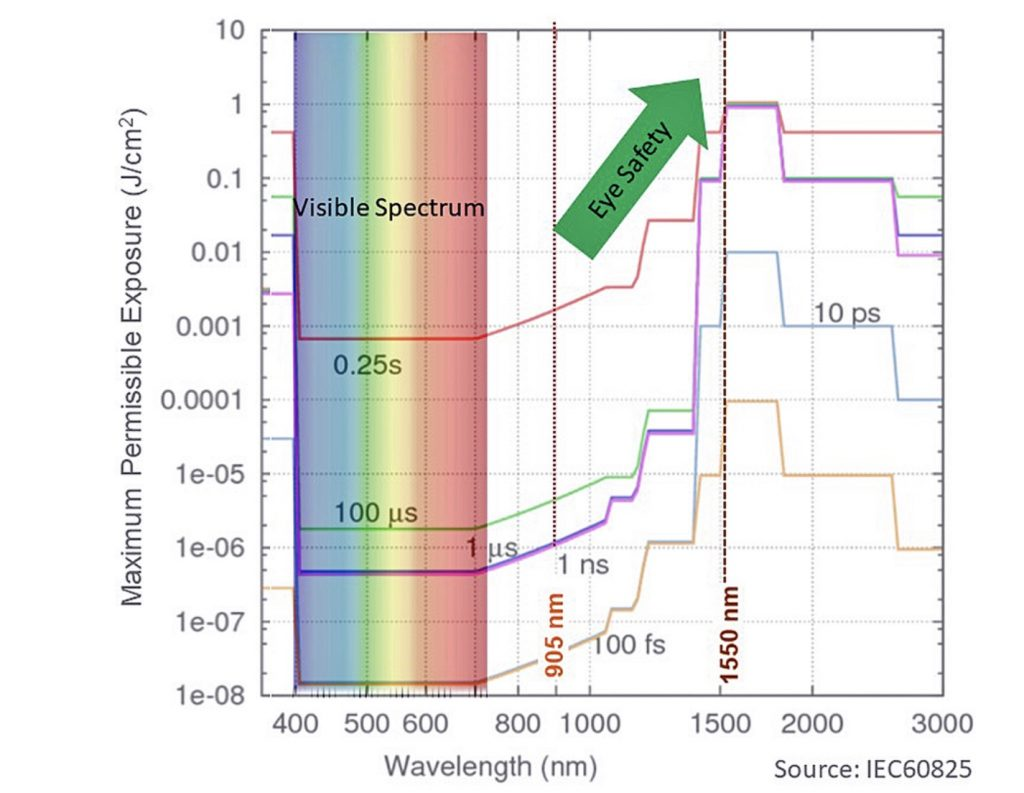
由于905nm 更接近可見光,視網膜對其更敏感,同時液態水對其吸收也更少,因此這種光線更容易直達視網膜。相比而言,1550nm 容易被水吸收,因此在抵達視網膜之前已經被玻璃體等前部結構進行一輪吸收,抵達視網膜的較少。同時1550nm 光折射率更大,即便是抵達視網膜,也不容易聚焦成很小的光點,能量相對分散,進一步減小了損傷。
基于以上原因,在連續波情況下,1550nm 激光的人眼安全功率達到905nm 的10 倍,如果是瞬間發光則倍數更多,如果發光控制在納秒級別(激光雷達通常一個脈沖只有幾個納秒),那么1550nm 激光人眼允許的強度可以更高。
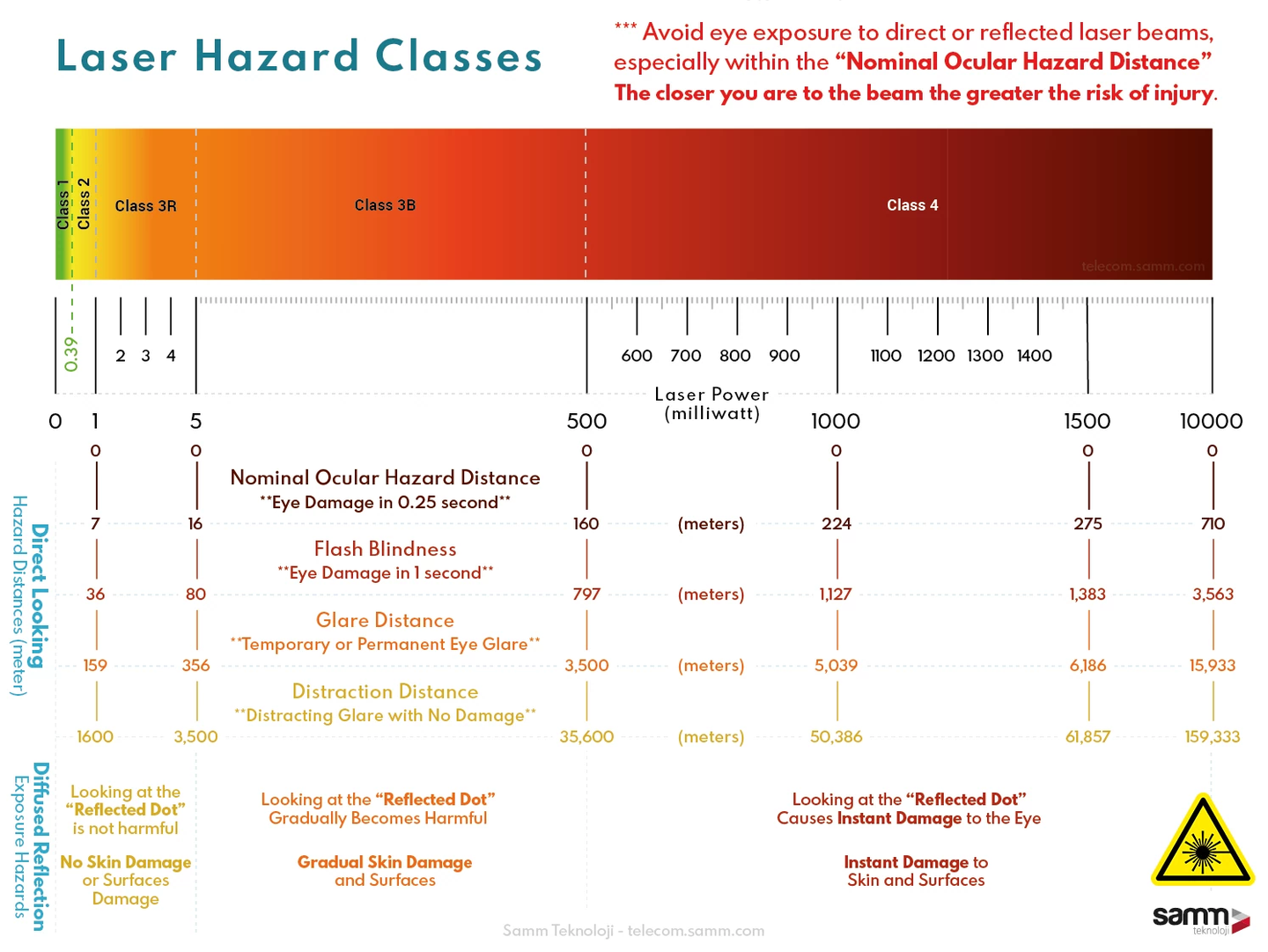
下文對激光危害等級進行了詳細的羅列
Ref:Laser Hazard Classes and Eye Safety
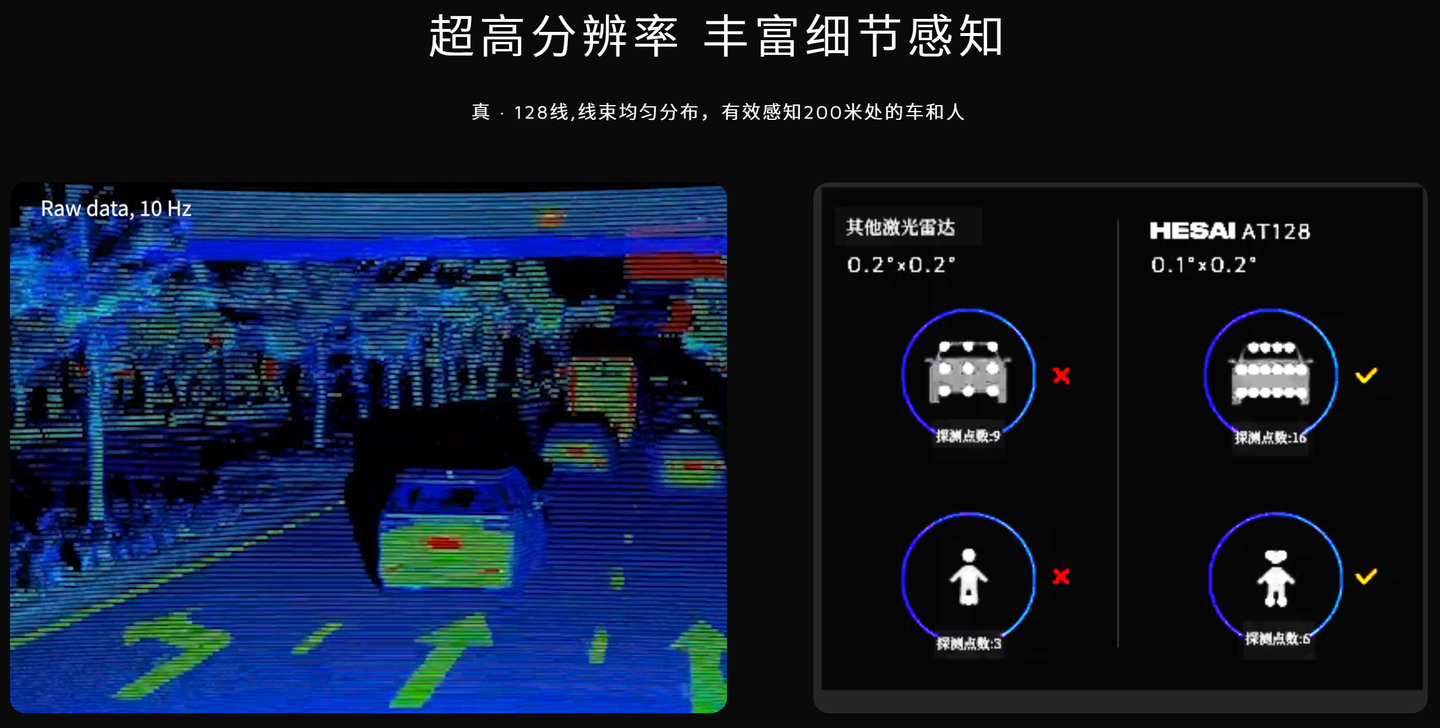
4、Lidar的點頻是什么,和什么相關?

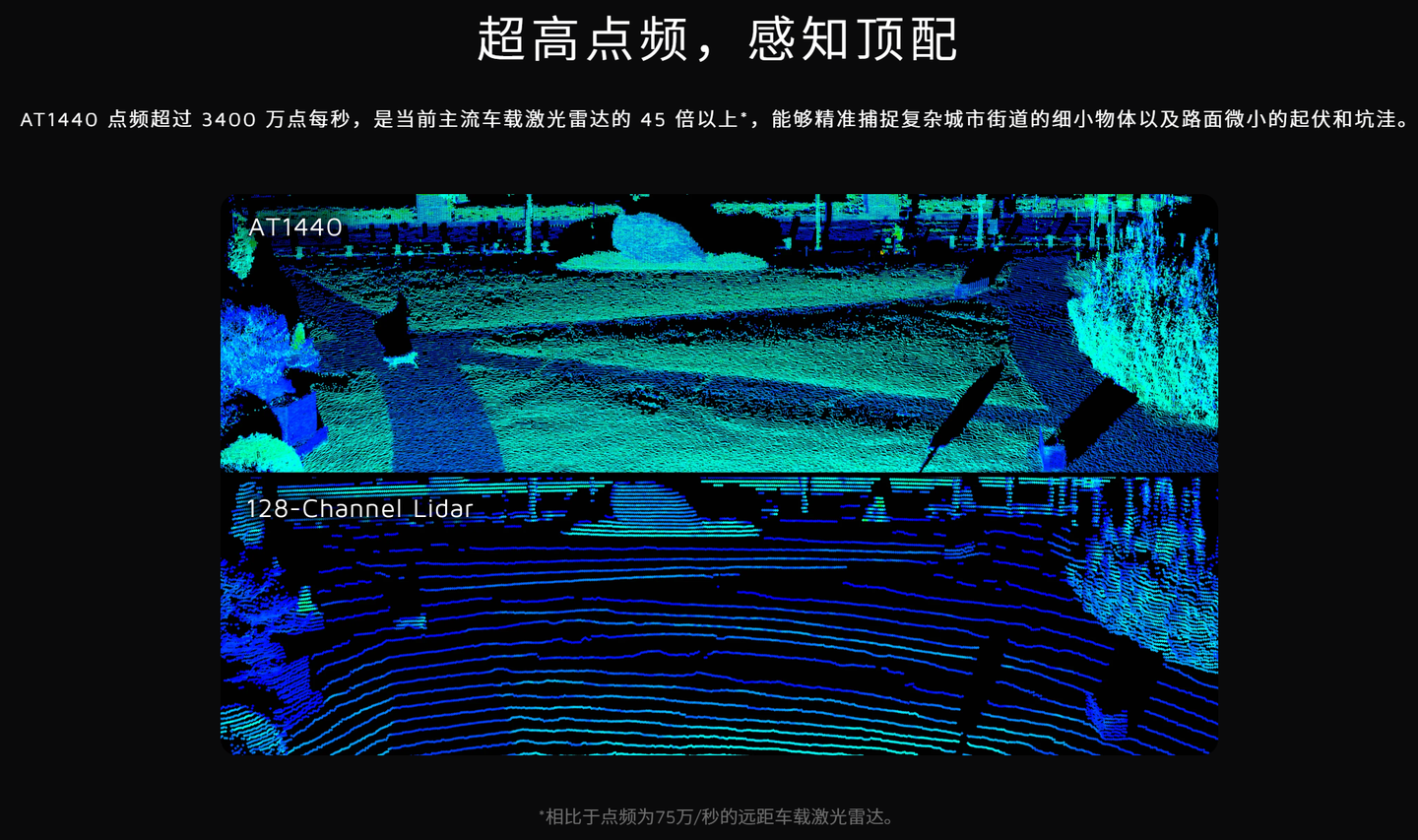
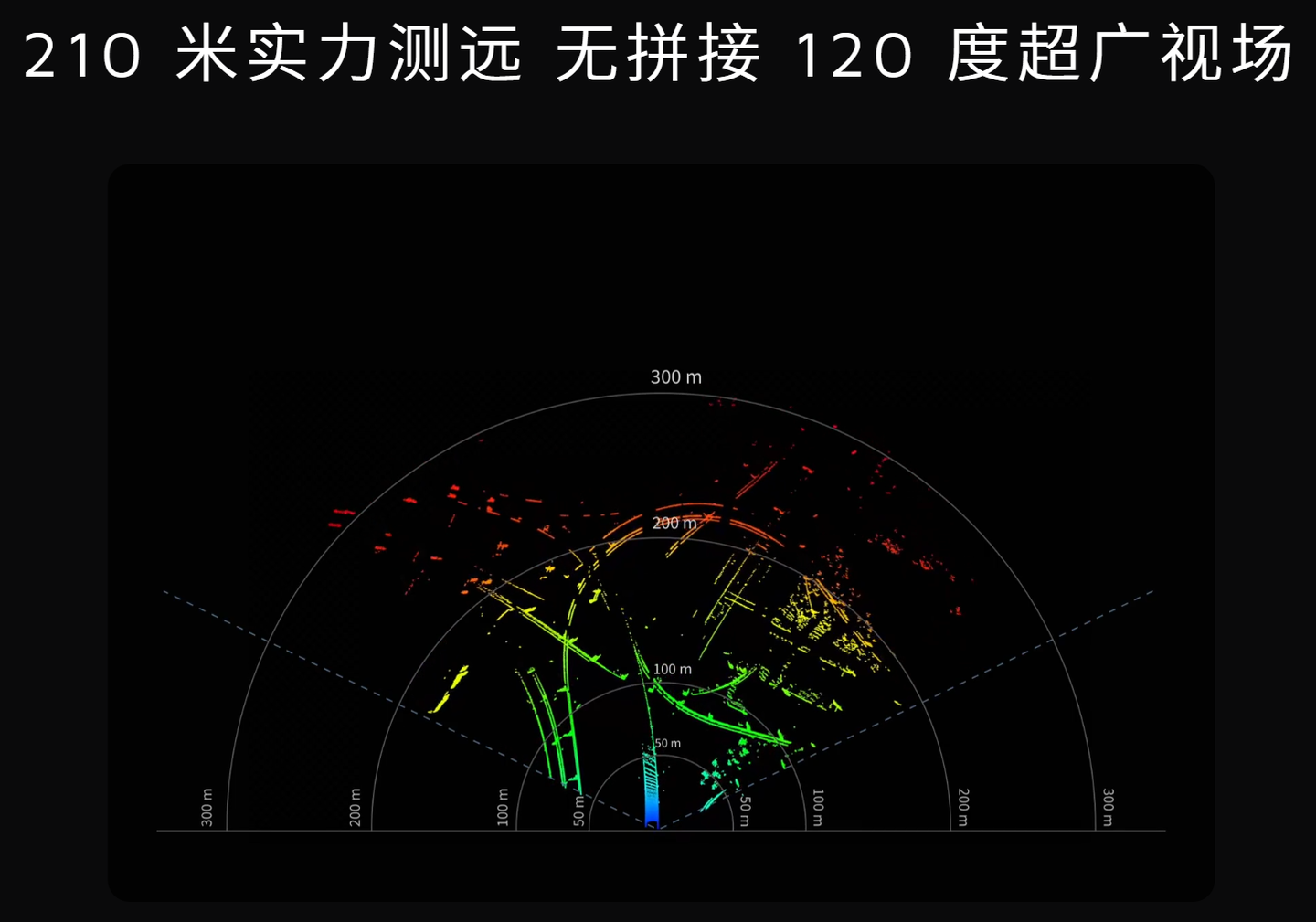
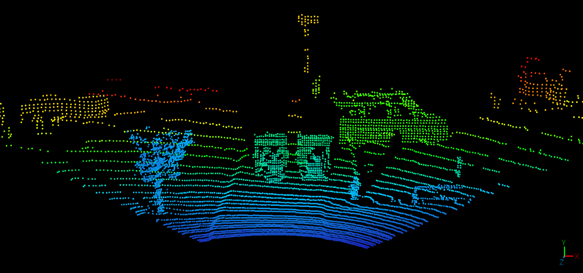
上圖給出了禾賽Lidar的點頻效果,可以看到點頻越高,點云對外部場景的還原度越高,越有利于后端對Lidar點云進行處理的算法。
點頻是按照秒計的,計1秒內輸出的點云數量,以AT128架構為例,其每秒產生的點云數據點數(即回波數)為1536000點/秒(單回波),計算如下:
-
HFOV=120°,水平角分辨率=0.1°,通道數128(即線數),掃描幀率=10Hz
-
10Hz下,單線每幀產生120/0.1=1200數據點,全通道每幀產生1200*128=153600個數據點;每秒10幀,即1536000個數據點;
-
雙回波模式下,有效點頻是單回波的兩倍。
-
點云傳輸的工作周期約為50%,因此,峰值傳輸率約為平均值的兩倍左右。
其和Lidar的掃描頻率(10Hz幀率)相關的是其中的轉鏡轉速,即每秒轉10圈,每圈保障激光束在水平120°范圍內完成一次掃描,掃描的步長為0.1°。


對應速騰M1參考圖12,水平測角通過振鏡水平向的擺動,由于振鏡水平向擺動角度有限,所以用5組反射鏡,進行拼接,實現水平120°的覆蓋,垂直測角通過振鏡垂直向的擺動完成,實現垂直向25°的覆蓋。
M1的水平和垂直角分辨率均為0.2°,點頻為每秒78.7萬。
5、Lidar的測量精度問題
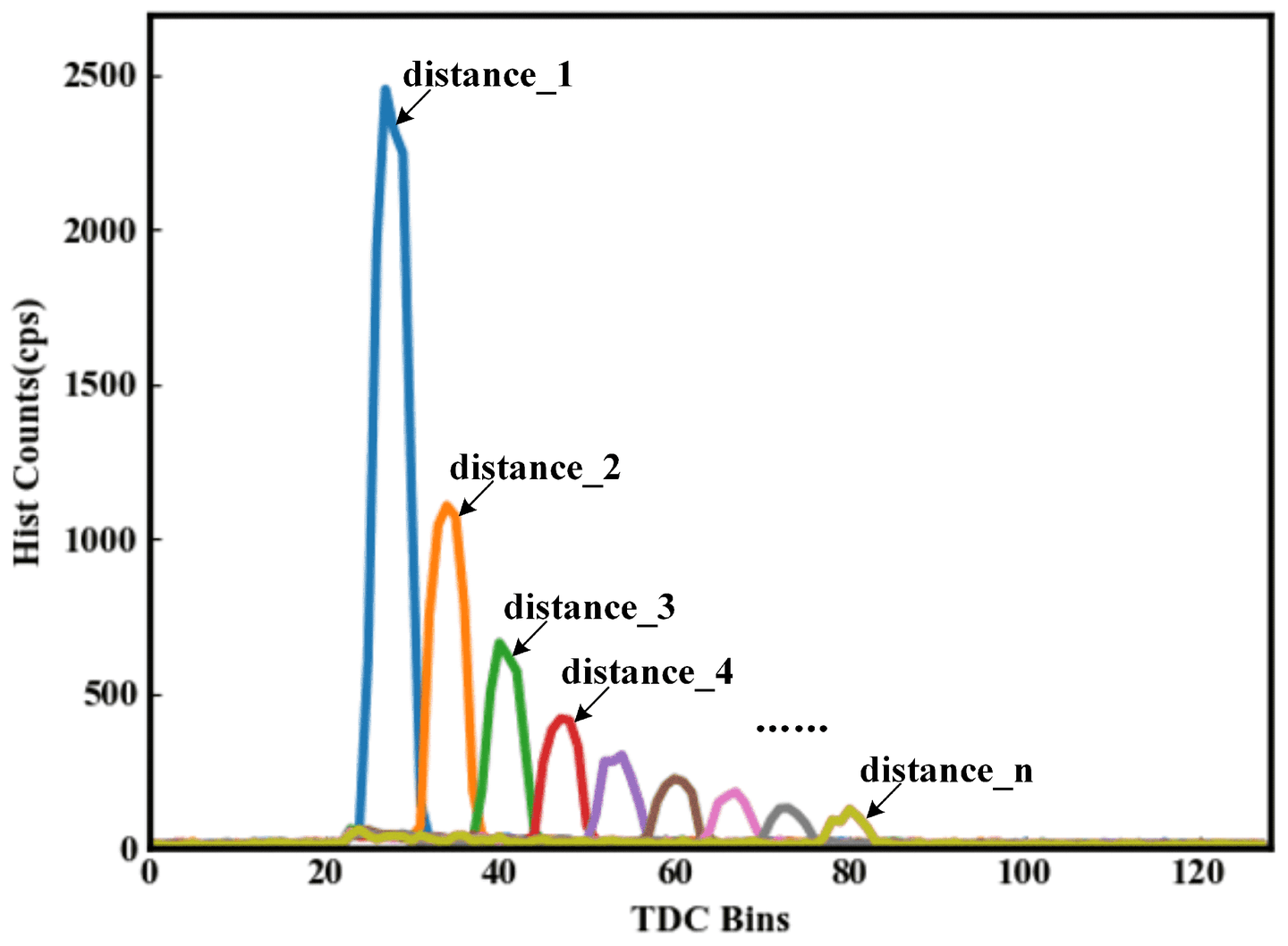
dToF測距技術的核心為生成光子計數的直方圖,而直方圖的粗細程度則直接決定了測距的精度。當激光脈沖功率較大的時候,產生的直方圖需要少量的激光脈沖即可,但是直方圖與原始的光強度包絡相差較大。而當激光脈沖功率較小的時候,雖然產生一張直方圖所需要的激光脈沖數量較多,但是直方圖描繪的包絡與光強本身的包絡曲線符合度較好。
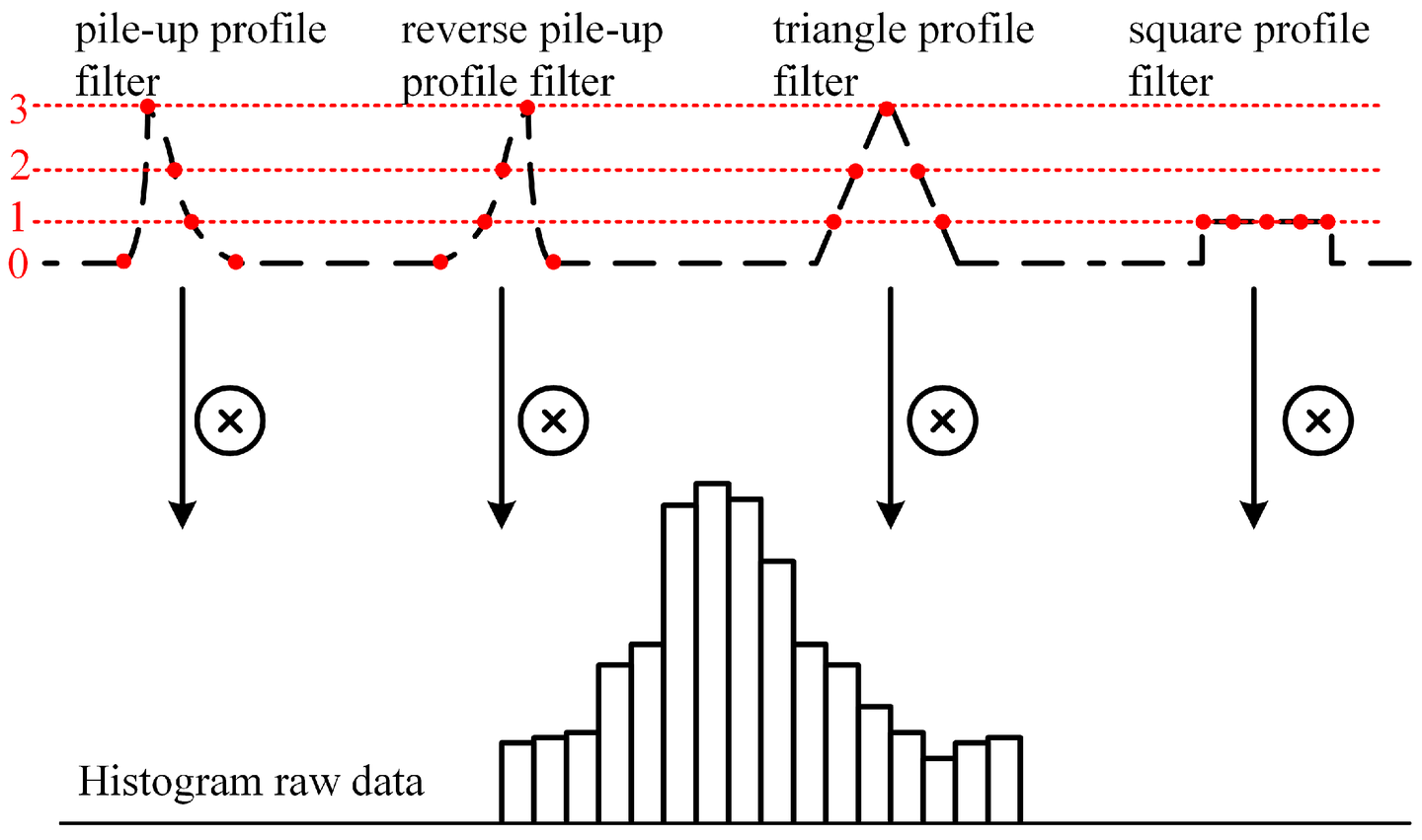
采用不同的脈沖寬度以及不同的Profile Matched Filter可以得到不同的測距精度效果。
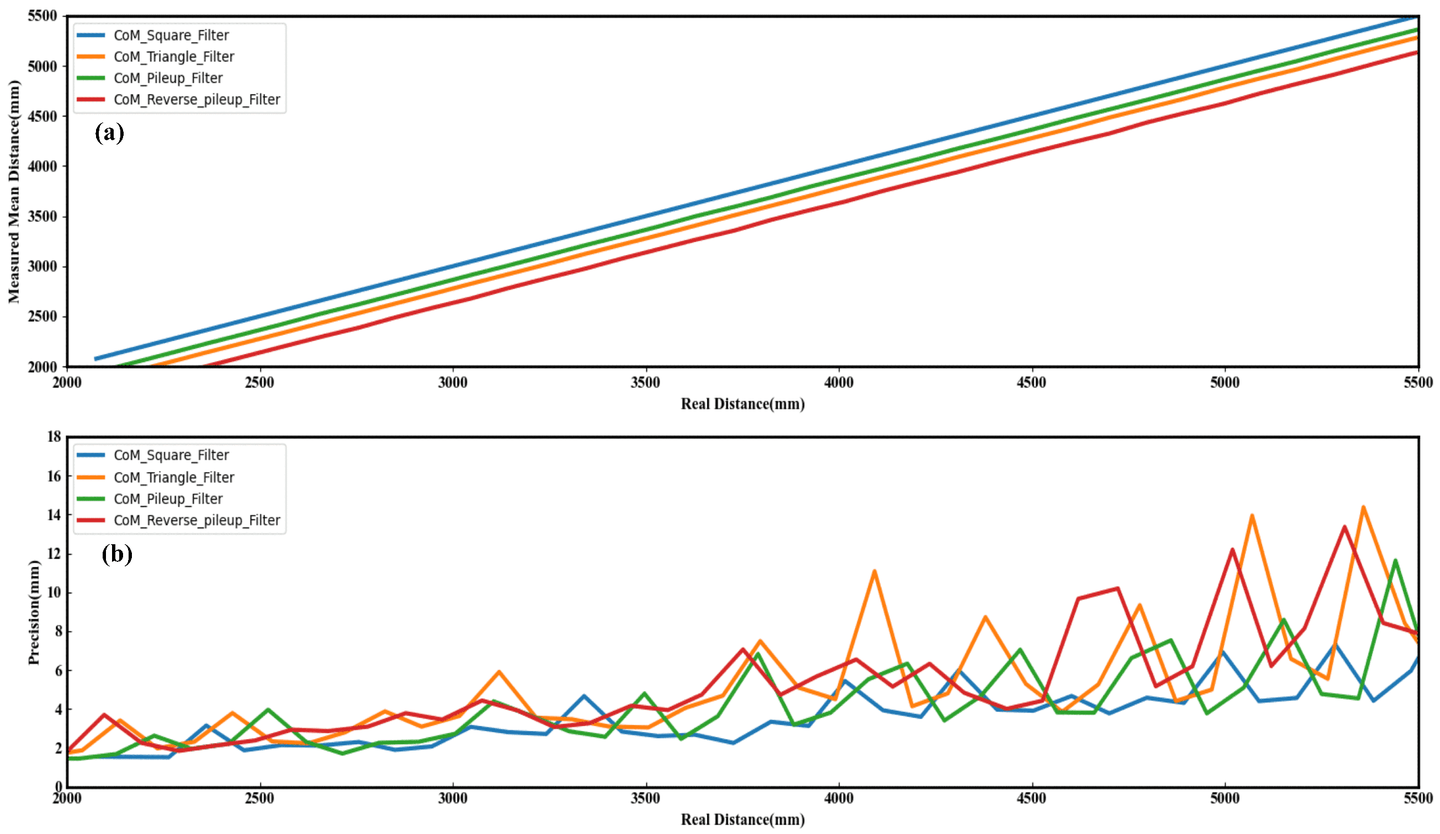

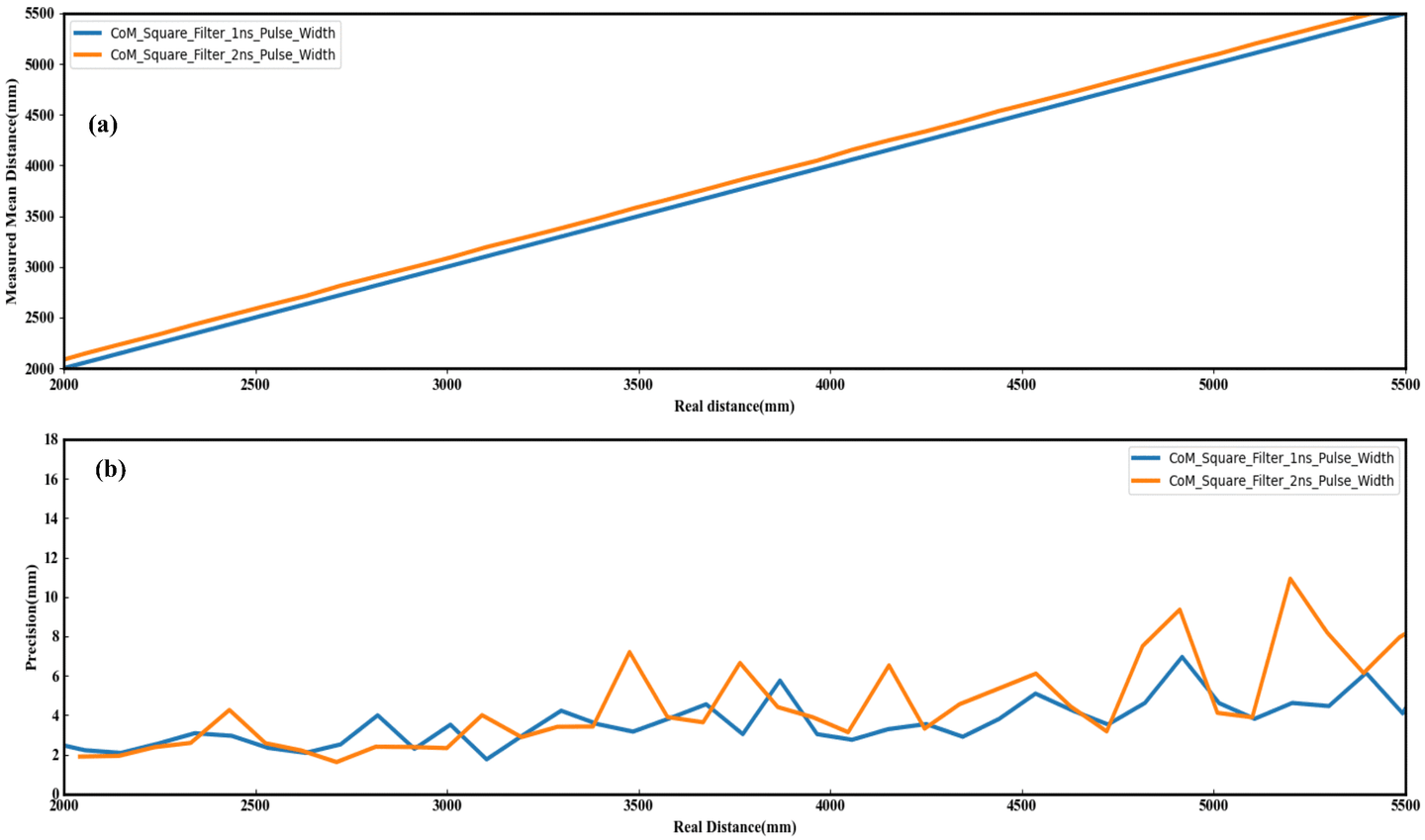
Ref:https://www.mdpi.com/1424-8220/23/6/3011
除了脈沖寬度和匹配濾波器,測量精度還受到目標物的反射率以及外部光強度影響。
6、對以上幾點的小結
dTOF激光雷達關鍵指標
1、量程:所能測量的距離遠近。
2、采樣率:每秒所能收集的點數據數量。
3、精度:測量準確程度。
4、角度分辨率:由采樣率和掃描頻率決定的,在2D識別中,角度分辨率的大小決定了所能掃描物體的范圍大小。
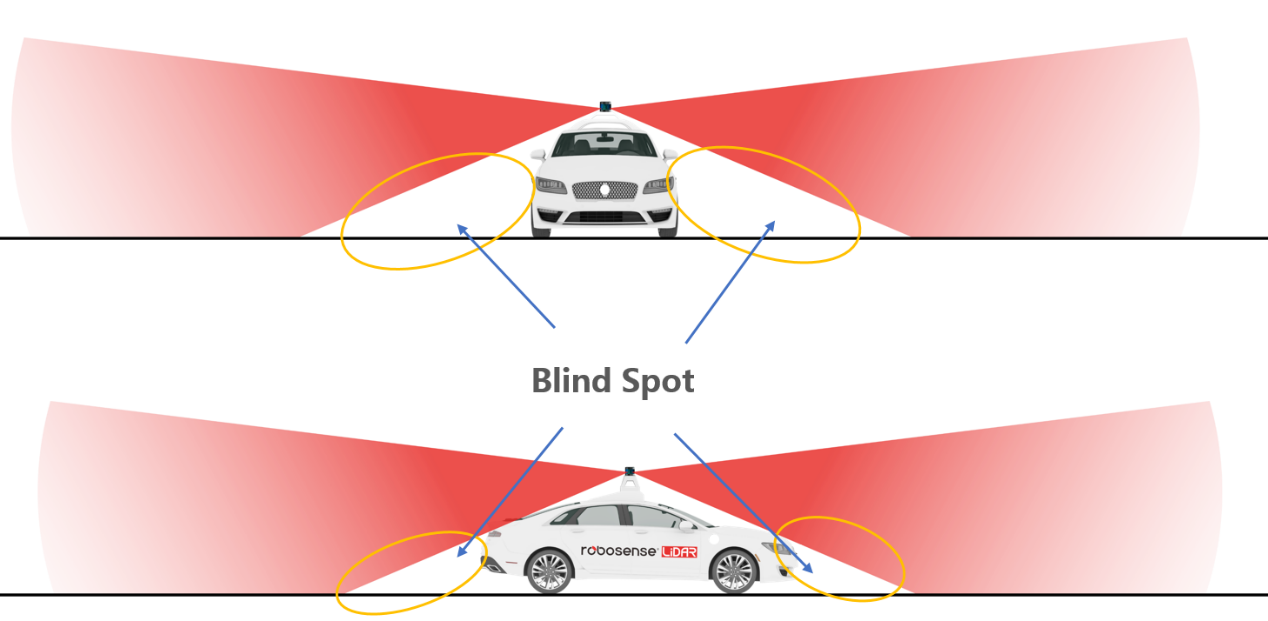
5、盲區:當距離近到一定程度時雷達會識別不到光,這塊無法識別的區域被稱為盲區。
6、抗光強度:雷達受光線影響的程度,程度越小抗光強度越大。
7、掃描頻率:旋轉結構的轉速。
以上基本將Lidar的關鍵指標問題都以及說清楚了。盲區的說明如下:
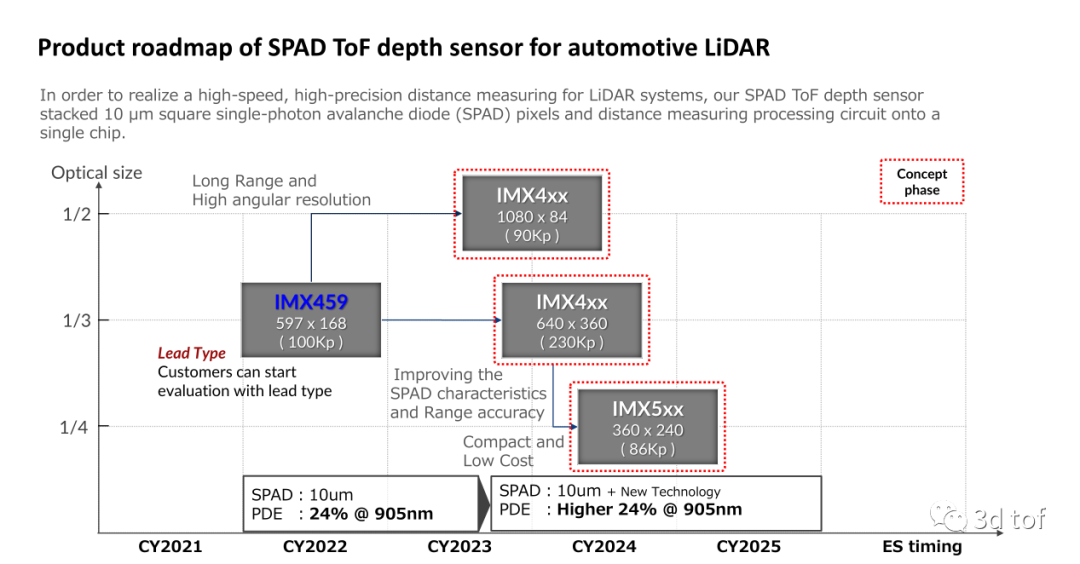
7、對SPAD的補充說明(為什么長距高分辨Lidar采用SPAD)
以下參考了SONY官網的幾篇文章:
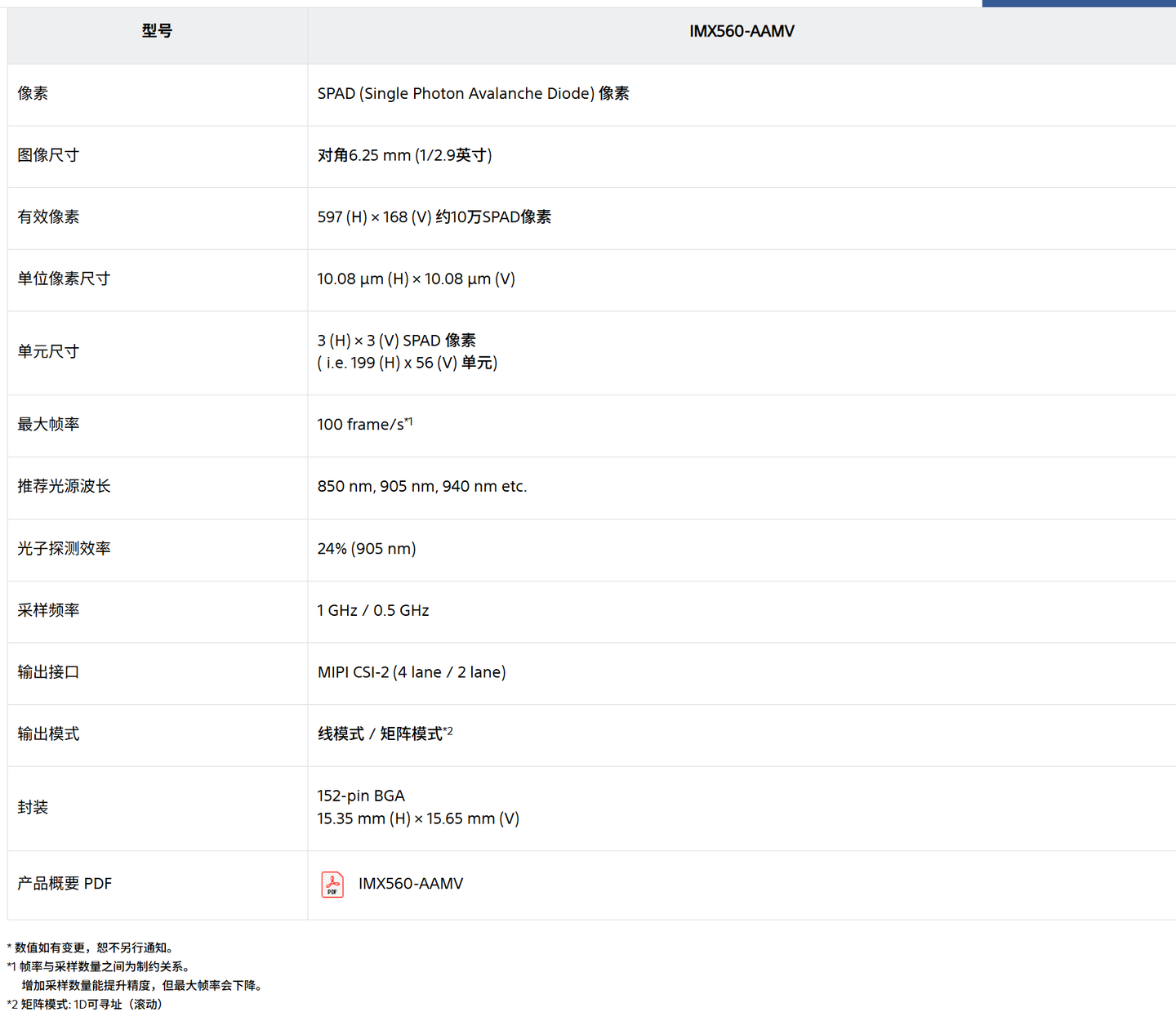
Ref:SPAD ToF式距離傳感器 1/2.9英寸 約10萬像素 IMX560 | 產業用圖像傳感器 [概述] | 圖像傳感器 | 產品?解決方案 | Sony Semiconductor Solutions Group
Ref:索尼發布堆疊式SPAD深度傳感器IMX479,助力車載激光雷達實現高精度高速測距
Ref:以領先的光子探測率實現高精度、低功耗測距 索尼發布用于智能手機的SPAD距離傳感器
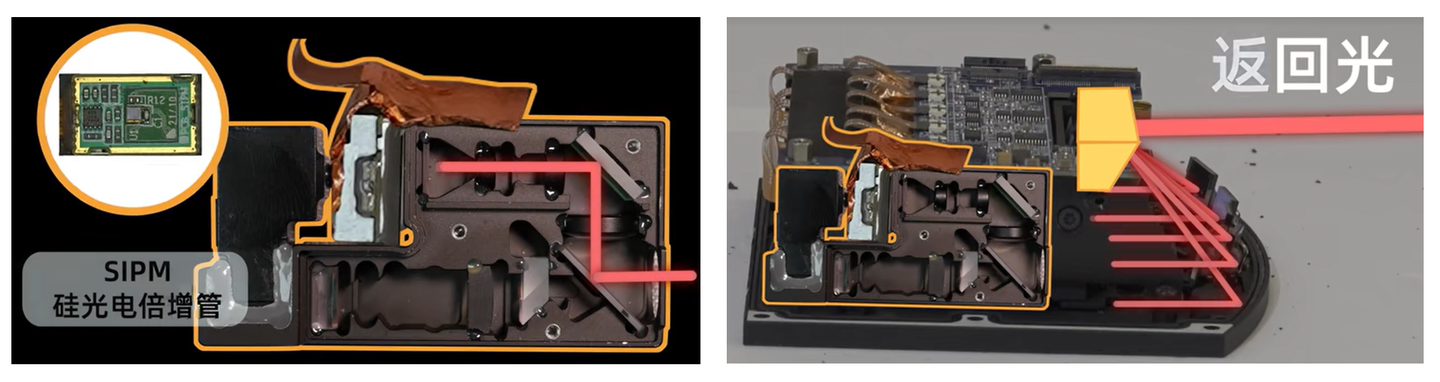
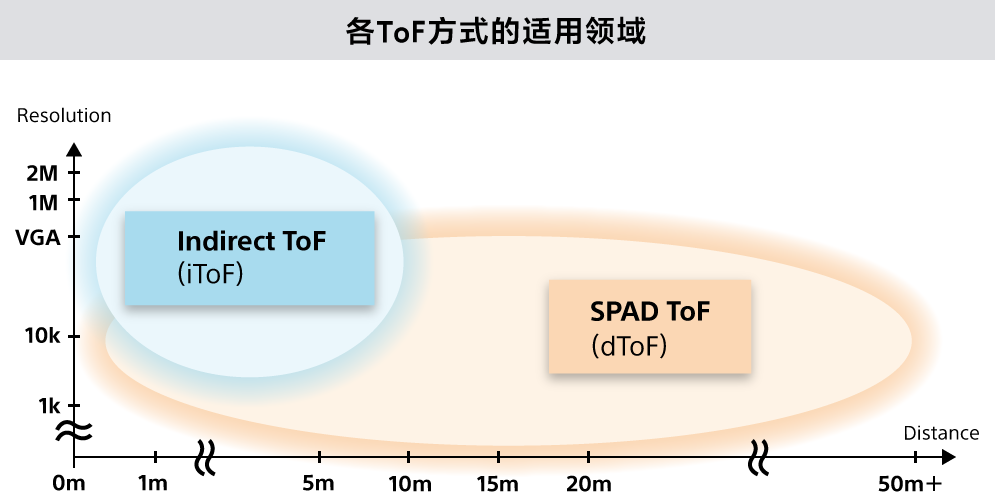
SPAD(Single Photon Avalanche Diode)像素的特點是利用具有“雪崩倍增效應”的像素結構,將單個入射光子的電子放大,從而形成雪崩式疊加,因此能檢測到微弱的光。SPAD ToF式距離傳感器(以下簡稱SPAD距離傳感器)利用SPAD方式的受光元件檢測光的飛行時間,從而實現了長距離、高精度的距離測量。
SPAD距離傳感器會在捕獲到光子時,以雪崩倍增效應增強電子,從而放大檢測到的光子并將其轉換為強信號,因此能高精度地檢測到從遠處返回的微弱光信號。它可以測量數十米以上的距離,相比indirect ToF方式(iToF),能夠捕捉大范圍的3D信息。
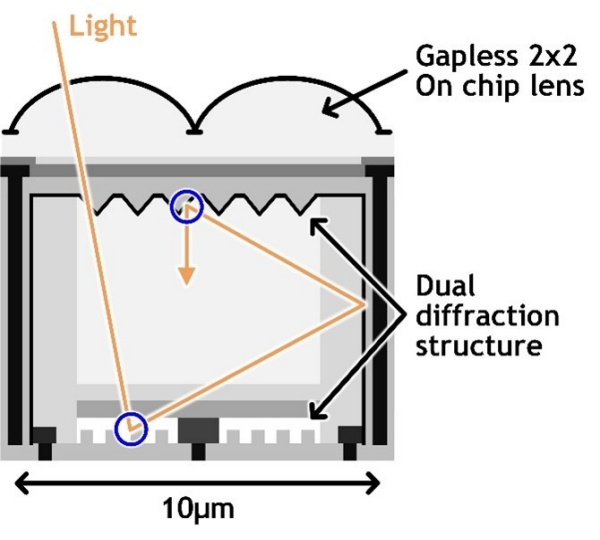
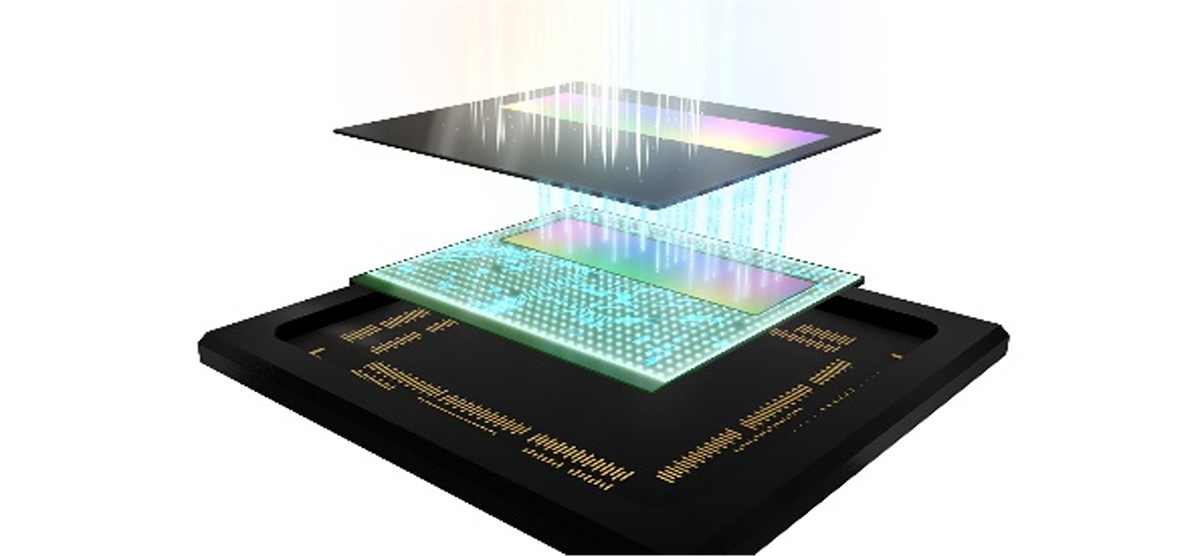
下圖中IMX479對像素的光入射面和底面進行了不規則設計,并優化了透鏡形狀。通過折射入射光來提高吸收率,使車載激光雷達光源常用的940納米波長達到了37%的光子探測效率。因此,即使在100,000lux以上的強光背景光環境下,也可以高精度地探測和識別最遠300米外的目標物體。
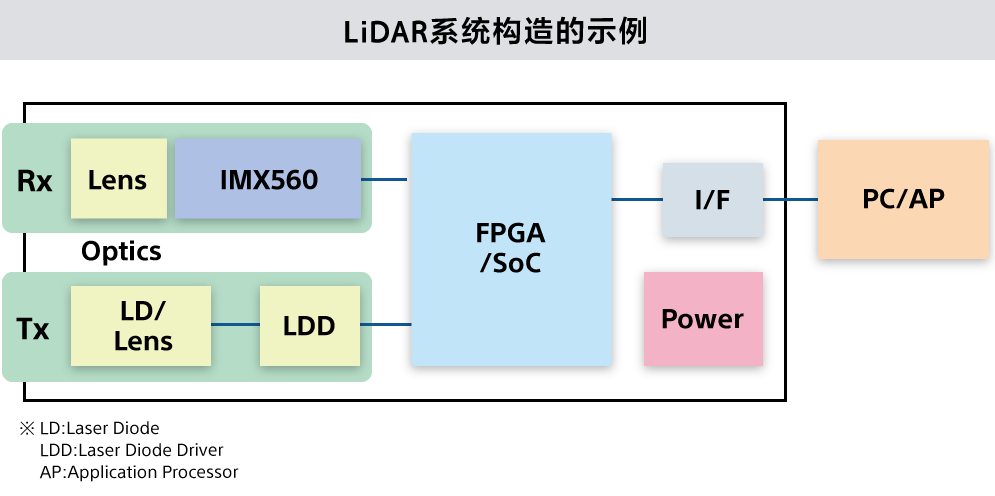
SPAD距離傳感器在芯片上搭載了Time-to-Digital轉換器,因此可輸出數字信號。它采用堆棧結構,并列配置多個Time-to-Digital轉換器,從而能夠同時對多個點進行測距,實現高分辨率,并以此提升物體的識別精度。
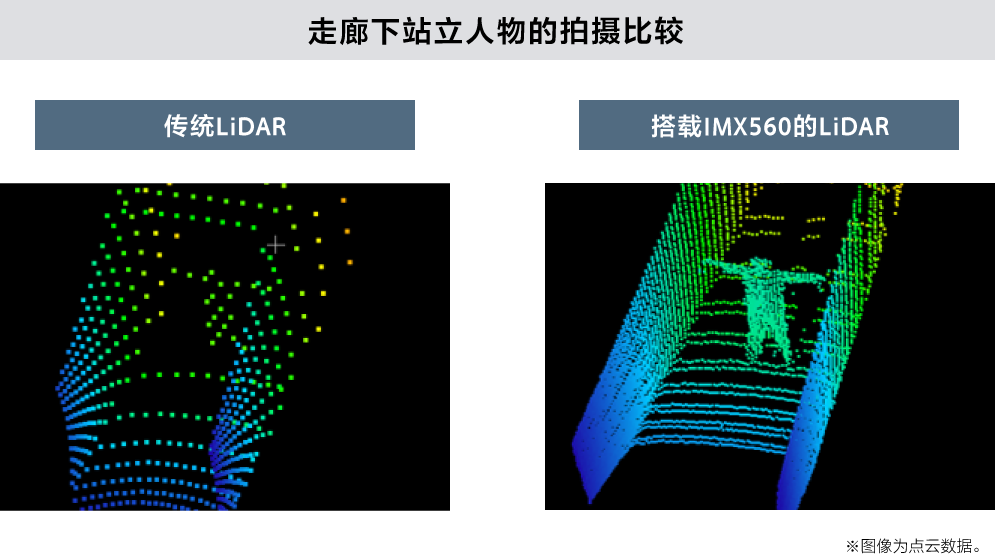
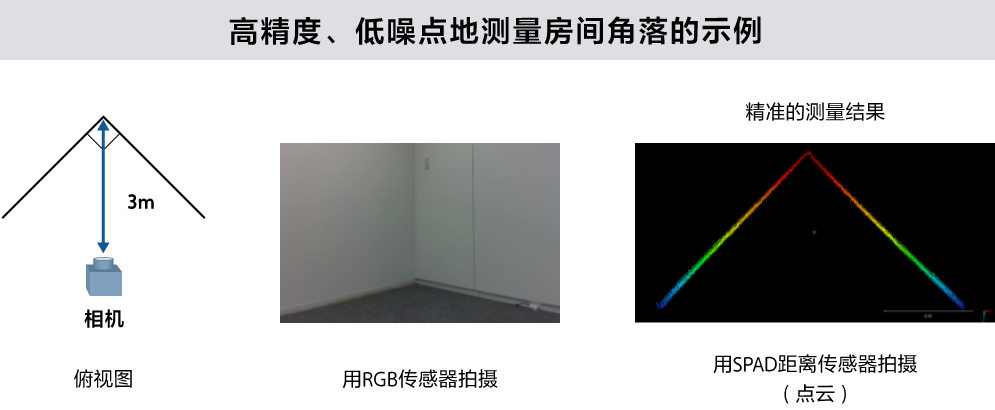
為了準確測量距離,相對于從相機光源發出后、被被攝體反射一次就到達傳感器的信號,那些在非預期路徑上反射回來的信號需要盡可能被排除。特別是像房間角落這類凹陷的形狀,很可能在非預期路徑上產生信號光,導致測量值出現偏差。而SPAD ToF的測距方式會多次測量與對象物之間的距離,對獲取的各點的測量結果進行統計處理。因此能夠穩定獲取高精度、低噪點的數據,對角落也能精準測量。由此,可提升測量的可靠性,有望在各種用途上確保精度。

Ref:https://www.mdpi.com/1424-8220/23/15/6927
Ref:https://www.mdpi.com/1424-8220/21/11/3839
Ref:https://imagesensors.org/wp-content/uploads/2018/05/Salvatore_Gnecchi.pdf







)







)
——業務需求文檔(BRD))

![[Sync_ai_vid] 唇形同步評判器 | 圖像與視頻處理器 | GPU測試](http://pic.xiahunao.cn/[Sync_ai_vid] 唇形同步評判器 | 圖像與視頻處理器 | GPU測試)
