目錄
一、哈希表
1.哈希算法
2.哈希碰撞
3.哈希表
4.哈希表相關操作
哈希表插入
哈希表遍歷
元素查找
哈希表銷毀
二、排序算法
1. 排序算法對比
2. 排序算法實現
冒泡排序
選擇排序
插入排序
希爾排序
快速排序
三、查找算法
1. 查找算法對比
2. 查找算法實現
順序查找
折半查找(二分查找)
一、哈希表
1.哈希算法
- 將數據通過哈希算法映射成一個鍵值,存取都在同一個位置實現數據的高效存儲和查找,將時間復雜度盡可能降低至O(1)
- 哈希算法是不固定的,需要選擇一個合適的哈希算法,才能映射成一個鍵值
2.哈希碰撞
多個數據通過哈希算法得到的鍵值相同,稱為產生哈希碰撞
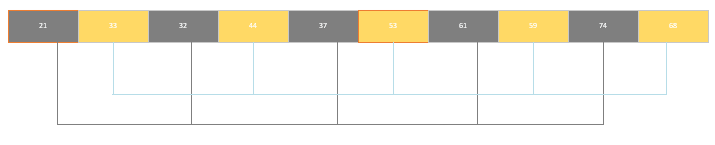
3.哈希表
- 構建一個哈希表,存放0~100之間的數據
- 哈希算法的選擇:
將0~100之間的數據的個位作為鍵值?
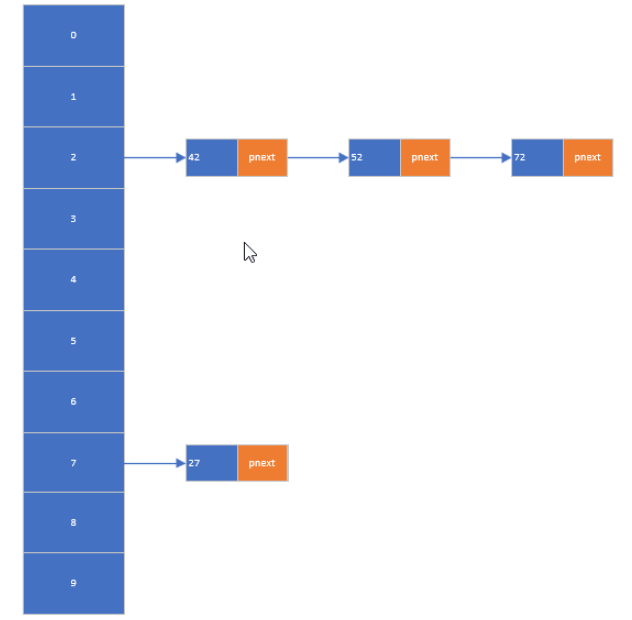
哈希表通過哈希函數實現高效存取,需解決哈希碰撞
4.哈希表相關操作
哈希表插入
#define INDEX 10 // 假設哈希表大小為10(0-9)
linknode *phashtable[INDEX] = {NULL}; // 哈希表數組/* 哈希表插入函數 */
int insert_hashtable(int tmpdata) {int key = 0;linknode **pptmpnode = NULL; // 二級指針用于修改鏈表節點linknode *pnewnode = NULL;// 計算哈希鍵值(取數據的個位)key = tmpdata % INDEX;// 找到插入位置(保持鏈表有序)for (pptmpnode = &phashtable[key]; *pptmpnode != NULL && (*pptmpnode)->data < tmpdata; pptmpnode = &(*pptmpnode)->pnext) {// 循環移動指針至合適位置}// 申請新節點pnewnode = malloc(sizeof(linknode));if (NULL == pnewnode) {perror("fail to malloc");return -1;}// 插入新節點pnewnode->data = tmpdata;pnewnode->pnext = *pptmpnode;*pptmpnode = pnewnode;return 0;
}
哈希表遍歷
/* 遍歷哈希表所有元素 */
int show_hashtable(void) {int i = 0;linknode *ptmpnode = NULL;for (i = 0; i < INDEX; i++) {printf("%d:", i); // 打印鍵值ptmpnode = phashtable[i];while (ptmpnode != NULL) {printf("%2d ", ptmpnode->data); // 打印鏈表元素ptmpnode = ptmpnode->pnext;}printf("\n");}return 0;
}
元素查找
/* 查找哈希表中的元素 */
linknode *find_hashtable(int tmpdata) {int key = 0;linknode *ptmpnode = NULL;key = tmpdata % INDEX; // 計算鍵值ptmpnode = phashtable[key];// 遍歷對應鏈表查找元素while (ptmpnode != NULL && ptmpnode->data <= tmpdata) {if (ptmpnode->data == tmpdata) {return ptmpnode; // 找到返回節點地址}ptmpnode = ptmpnode->pnext;}return NULL; // 未找到返回NULL
}
哈希表銷毀
/* 銷毀哈希表,釋放所有節點 */
int destroy_hashtable(void) {int i = 0;linknode *ptmpnode = NULL;linknode *pfreenode = NULL;for (i = 0; i < INDEX; i++) {ptmpnode = phashtable[i];pfreenode = phashtable[i];while (ptmpnode != NULL) {ptmpnode = ptmpnode->pnext;free(pfreenode); // 釋放當前節點pfreenode = ptmpnode;}phashtable[i] = NULL; // 置空數組元素}return 0;
}
二、排序算法
排序算法中,冒泡、選擇、插入排序適用于小規模數據;希爾、快速排序適用于大規模數據,其中快速排序性能最優(平均 O (nlogn))
1. 排序算法對比
| 算法 | 時間復雜度 | 穩定性 | 核心思想 |
|---|---|---|---|
| 冒泡排序 | O(n2) | 穩定 | 相鄰元素比較,大元素后移,重復 n-1 次 |
| 選擇排序 | O(n2) | 不穩定 | 每次從剩余元素中找最小值,與當前位置交換 |
| 插入排序 | O(n2) | 穩定 | 將元素插入到已排序序列的合適位置,類似整理撲克牌 |
| 希爾排序 | O(n^1.3) | 不穩定 | 按步長分割數組為子序列,分別插入排序,逐步減小步長至 1 |
| 快速排序 | O(nlogn) | 不穩定 | 選基準值,將數組分為小于和大于基準的兩部分,遞歸排序兩部分 |
2. 排序算法實現
冒泡排序
核心思想是通過相鄰元素的比較和交換,使較大的元素逐步 “浮” 到數組的末尾。具體來說,相鄰的兩個元素比較,大的向后走,小的向前走,循環找出數組中 len-1 個較大的值,最終實現整個數組的有序排列
/* 冒泡排序:相鄰元素比較交換,大元素后移 */
int bubble_sort(int *parray, int len) {int i = 0;int j = 0;int tmp = 0;for (j = 0; j < len - 1; j++) { // 控制輪次for (i = 0; i < len - 1 - j; i++) { // 每輪比較次數遞減if (parray[i] > parray[i + 1]) {// 交換元素tmp = parray[i];parray[i] = parray[i + 1];parray[i + 1] = tmp;}}}return 0;
}
選擇排序
核心思想是從前到后在未排序元素中尋找最小值,然后將找到的最小值與未排序部分的前面元素進行交換。通過找到 len-1 個最小值,最后剩下的一個元素自然就是最大值,從而完成排序
/* 選擇排序:找最小值并交換到當前位置 */
int select_sort(int *parray, int len) {int i = 0;int j = 0;int tmp = 0;int min = 0; // 最小值索引for (j = 0; j < len - 1; j++) {min = j; // 假設當前位置為最小值for (i = j + 1; i < len; i++) {if (parray[i] < parray[min]) {min = i; // 更新最小值索引}}// 交換最小值到當前位置if (min != j) {tmp = parray[min];parray[min] = parray[j];parray[j] = tmp;}}return 0;
}
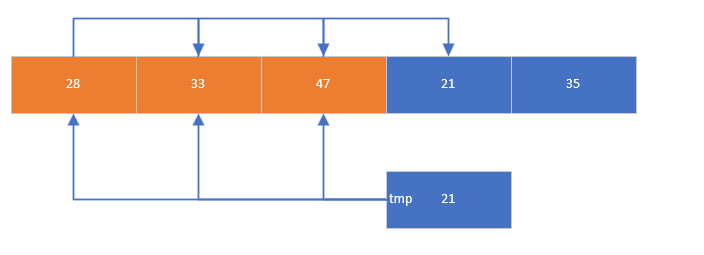
插入排序
核心思想是將數組中的每個元素逐個插入到已排序的數列中。首先取出要插入的元素,然后依次和前面的元素比較,比該元素大的元素向后移動,直到遇到前一個元素比要插入的元素小,或者到達有序數列的開頭時停止,最后將該元素插入到合適位置
/* 插入排序:將元素插入已排序序列的合適位置 */
int insert_sort(int *parray, int len) {int tmp = 0; // 待插入元素int i = 0;int j = 0;for (j = 1; j < len; j++) {tmp = parray[j]; // 取出待插入元素// 找到插入位置for (i = j; i > 0 && tmp < parray[i - 1]; i--) {parray[i] = parray[i - 1]; // 元素后移}parray[i] = tmp; // 插入元素}return 0;
}
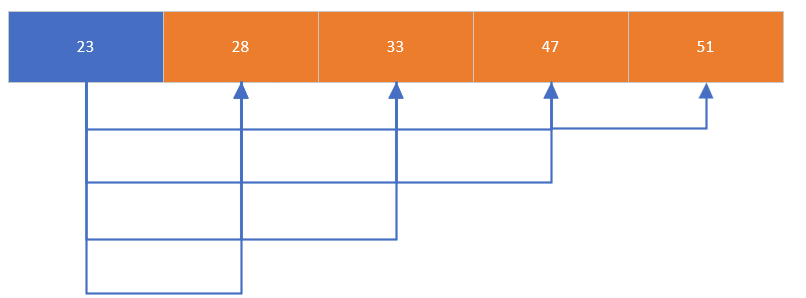
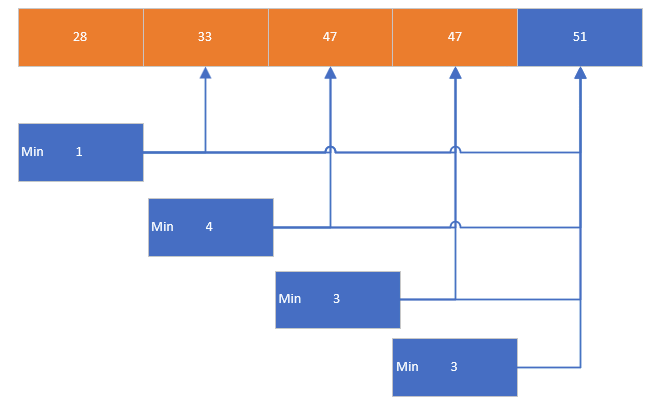
希爾排序
核心思想是通過選擇不同的步長,將數組拆分成若干個小的子數組,對每個子數組進行插入排序。當若干個子數組成為有序數列后,數組中的數據會大致有序,最后再對整體進行一次插入排序,以完成整個數組的排序


/* 希爾排序:按步長分割子序列,逐步縮小步長 */
int shell_sort(int *parray, int len) {int step = 0; // 步長int j = 0;int i = 0;int tmp = 0;// 步長初始為len/2,每次減半至0for (step = len / 2; step > 0; step /= 2) {// 對每個子序列進行插入排序for (j = step; j < len; j++) {tmp = parray[j];for (i = j; i >= step && tmp < parray[i - step]; i -= step) {parray[i] = parray[i - step]; // 元素后移}parray[i] = tmp; // 插入元素}}return 0;
}
快速排序
核心思想是選擇數組左邊的元素作為鍵值,從數組后面找一個比鍵值小的元素放到前面,再從前面找一個比鍵值大的元素放到后面,最后將鍵值放到中間位置。如果左右兩邊還有元素,則遞歸調用快速排序對兩邊元素進行排序
/* 快速排序:分治思想,以基準值分割數組 */
int quick_sort(int *parray, int low, int high) {int key = 0; // 基準值int i = low; // 左指針int j = high; // 右指針if (low >= high) {return 0; // 遞歸終止條件}key = parray[low]; // 選最左元素為基準值while (i < j) {// 從右向左找小于基準值的元素while (i < j && parray[j] >= key) {j--;}if (i < j) {parray[i] = parray[j]; // 移至左指針位置}// 從左向右找大于基準值的元素while (i < j && parray[i] <= key) {i++;}if (i < j) {parray[j] = parray[i]; // 移至右指針位置}}parray[i] = key; // 基準值歸位// 遞歸排序左半部分if (i - 1 > low) {quick_sort(parray, low, i - 1);}// 遞歸排序右半部分if (i + 1 < high) {quick_sort(parray, i + 1, high);}return 0;
}
三、查找算法
查找算法中,折半查找效率遠高于順序查找,但依賴有序數據
1. 查找算法對比
| 算法 | 時間復雜度 | 適用場景 | 核心思想 |
|---|---|---|---|
| 順序查找 | O(n) | 無序或小規模數據 | 從前往后依次遍歷,逐個比較 |
| 折半查找 (二分查找) | O(logn) | 有序數組 | 每次取中間元素比較,縮小查找范圍至左半或右半部分 |
2. 查找算法實現
順序查找
從數組的起始位置開始,逐個將元素與要查找的目標值進行比較,若找到與目標值相等的元素,則查找成功;若遍歷完整個數組都沒有找到,則查找失敗
/* 順序查找:遍歷數組逐個比較 */
int seq_search(int *parray, int len, int target) {int i = 0;for (i = 0; i < len; i++) {if (parray[i] == target) {return i; // 找到返回索引}}return -1; // 未找到返回-1
}
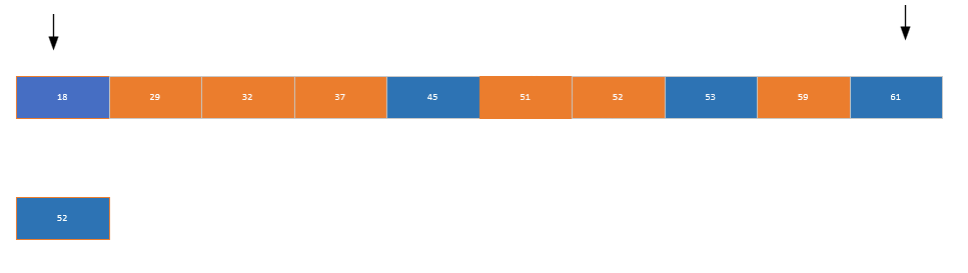
折半查找(二分查找)
針對有序數組,先計算中間位置,將中間位置的元素與目標值比較。如果目標值等于中間元素,則查找成功;如果目標值大于中間元素,則在數組的右半部分繼續查找;如果目標值小于中間元素,則在數組的左半部分繼續查找,重復此過程直至找到目標值或確定查找范圍為空
/* 折半查找:僅適用于有序數組 */
int binary_search(int *parray, int low, int high, int target) {int mid = 0;if (low > high) {return -1; // 查找失敗}mid = (low + high) / 2; // 計算中間索引if (parray[mid] == target) {return mid; // 找到返回索引} else if (target > parray[mid]) {// 目標在右半部分,遞歸查找return binary_search(parray, mid + 1, high, target);} else {// 目標在左半部分,遞歸查找return binary_search(parray, low, mid - 1, target);}
}









:Vue3響應式編程中this綁定機制與解決方案)

的使用——以NDVI去水體為例)




flutter命令行工具)


