?? 引言:低空感知,正重構數字世界的“底層感官接口”
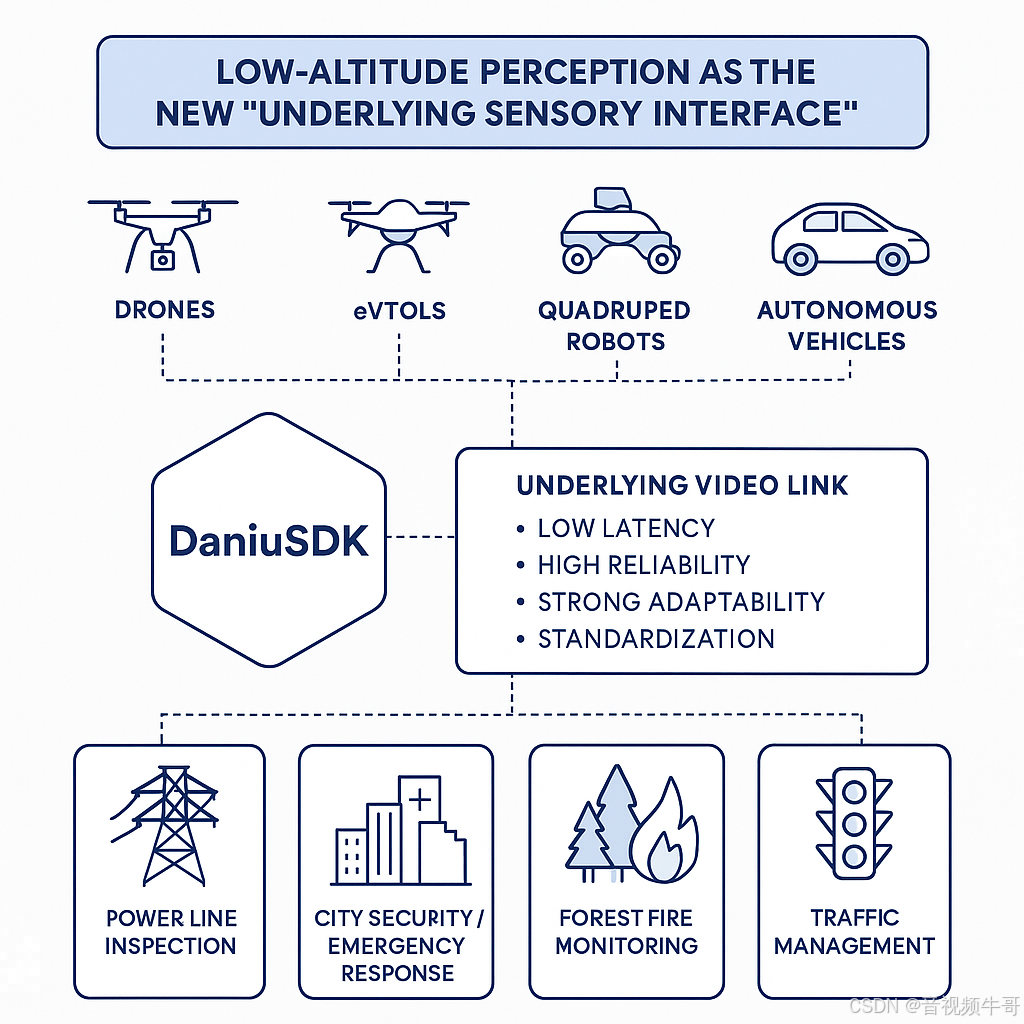
隨著低空經濟進入規模化部署階段,感知系統不再是“任務輔助”,而是演變為支撐智能化運行的基礎設施核心模塊。從電力巡檢的高空細節識別,到城市安防的區域態勢掌控,從林區火情的邊緣監測,到交通治理的實時決策輔助,低空域正在成為新一代“數據采集與認知邊界”的主戰場。
這一轉變的背后,是多類型智能載體的快速普及與聯網協同:無人機、eVTOL、四足機器人、無人車等終端,正從“孤立運行”走向“集群協作”,其視頻感知能力承擔著關鍵的“視覺神經”角色。
而要支撐這種分布式、異構化、任務多樣的感知系統建設,視頻鏈路的標準化與高性能能力成為核心挑戰——鏈路必須具備:
-
📷 高分辨率+高幀率圖像采集
-
🚀 毫秒級低延遲的跨網傳輸
-
🧠 與AI模塊解耦協同的幀數據接口
-
📡 在復雜網絡環境下的自適應韌性
在這條通感鏈路中,大牛直播SDK作為一套覆蓋推流、播放、服務、轉發、錄像等多模塊的跨平臺低延遲視頻基礎能力集,已在多個低空感知場景中完成深度嵌入與工程驗證,成為智能感知系統中不可或缺的“視頻基礎設施構建單元”。
🛰 第二部分:典型低空感知場景分類 —— 多樣任務驅動下的通感需求分層
低空感知并非單一場景的標準化輸出,而是在電力、安防、交通、環保等多個垂直領域中,圍繞“實時可視+智能理解”展開的多樣化任務體系。每一類場景對視頻采集、處理與傳輸的要求存在顯著差異,形成了對視頻通感能力的精細分層需求。
Windows平臺 RTSP vs RTMP播放器延遲大比拼
Android平臺RTSP播放器時延測試
Android平臺RTMP直播播放器延遲測試
以下為當前最具代表性的六大類低空感知場景及其技術特征:
? 六類典型低空感知場景 × 大牛直播SDK模塊能力映射表
| 場景類型 | 視頻通感需求 | 推薦大牛直播SDK模塊組合 | 支持功能 |
|---|---|---|---|
| 1. 電力巡檢場景 | 📷 4K圖像采集 + 秒級AI識別 + RTSP本地預覽 + RTMP遠程上傳 | 🔹 SmartPublisher(推流)🔹 SmartRecorder(錄像)🔹 輕量級 RTSP服務模塊🔹 AI幀接口模塊(YUV輸出) | ? H.264、H.265編碼+碼控 🧠 YUV幀對接YOLO/缺陷檢測 🌐 雙路(本地+遠程)并發推流 |
| 2. 城市安防 / 應急指揮 | 🚁 多視角RTMP并發 + 🎥 視頻回看 + 🌐 異構網絡適應 | 🔹 RTMP推流模塊🔹 多路RTSP轉RTMP推送模塊 🔹 SmartPlayer(指揮平臺回顯)🔹 錄像模塊(本地存儲) | 📡 多終端調度 ? 秒級延遲播放 📥 事件錄制/導出 |
| 3. 林區防火與自然保護 | 🌲 超視距圖像 + 📶 弱網緩存 + 🧠 離線AI識別 | 🔹 SmartPublisher推流模塊🔹 SmartRecorder(斷網存儲)🔹 第三方 AI幀接口模塊🔹 快照模塊(圖像提取) | 🛰 離線邊錄 ? 火點識別觸發推送 📤 快照結構化上傳 |
| 4. 智能交通治理 | 🛣 多端同步顯示 + 📡 視頻融合GIS + 📸 快照觸發 | 🔹 SmartPlayer(車端/指揮端播放)🔹 錄像+快照模塊🔹 控制接口層(分辨率/碼率動態調節) | 📊 多平臺兼容:Unity/Android/Windows 🧭 快照打點配合GIS 🧩 可視化聯動系統 |
| 5. 邊防 / 海防巡邏 | 🌊 RTSP低帶寬推流 + 🛰 本地錄像備份 | 🔹 輕量級RTSP服務模塊 🔹 SmartRecorder(本地錄像)🔹 RTSP拉流播放模塊 | 📶 弱網環境適應 📁 本地文件斷點合并 🛰 無人艇回放、補傳 |
| 6. 工業園區 / 化工廠巡檢 | 🏭 本地AI分析 + 🧪 快照上傳 + 異常報警 | 🔹 輕量級RTSP服務🔹 SmartPlayer(本地預覽)🔹 快照模塊 + 第三方AI幀接口 | 🔐 封閉網絡內可控 🧠 離線模型運行(如目標檢測) 📤 事件報警圖上傳云平臺 |
🧩 低空感知任務的三類通感特征分布
我們可以將上述典型任務場景進一步抽象出以下三類視頻鏈路特征:
| 通感維度 | 類型說明 | 典型代表場景 |
|---|---|---|
| 任務延遲敏感型 | 視頻鏈路要求毫秒級響應,支持遠程實時決策與交互 | 空中安防調度、事故應急處置 |
| 視覺清晰度優先型 | 視頻圖像要求高分辨率、高動態范圍,供AI分析使用 | 電力塔缺陷識別、森林火情監控 |
| 穩定性與冗余保障型 | 網絡不穩定或任務不可預期,需支持邊錄邊傳等策略 | 海防巡邏、林區無人站點監控 |
? 大牛直播SDK如何精準匹配?
大牛直播SDK通過其模塊化架構,在不同場景中靈活調度所需通感能力組合:
-
🧠 在高分辨率AI場景中,提供 YUV/RGB幀回調接口 + 零拷貝解碼渲染;
-
🌐 在高延遲容忍低帶寬環境下,支持 碼率動態控制;
-
🔁 在斷網/弱網場景下,內置 按需錄像、高、低分辨率雙路編碼推流切換機制。
🧠 第三部分:大牛直播SDK能力映射 —— 構建彈性、泛在、智能的低空視頻通感引擎
面對前述各類低空感知任務對視頻鏈路提出的高分辨率采集、高可靠傳輸、高靈活適配、高效率處理的復雜要求,大牛直播SDK通過模塊化能力解耦設計,在視頻“采 → 編 → 傳 → 播 → 存 → 構 → 分”全鏈路上提供了精準、穩定、可擴展的能力支持。
🧩 模塊能力矩陣映射表
| 模塊名稱 | 功能特性 | 應用側定位 | 對應場景 |
|---|---|---|---|
| 🎥 推流模塊(SmartPublisher) | 支持軟/硬編碼(H.264/H.265)、碼率自適應、斷線重連、雙路推流錄像(RTSP+RTMP) | 📦 終端側無人機 / 四足機器人 / 工業網關 | 電力巡檢、林火監測、園區巡邏 |
| 📡 輕量級 RTSP 服務模塊 | 嵌入式設備上啟動內置 RTSP Server,支持多客戶端觀看、內網訪問、權限控制 | 📟 邊緣端 ARM Linux 系統 / 工控機 | 工業廠區本地部署、無人站點 |
| 📺 播放器模塊(SmartPlayer) | 支持 RTSP、RTMP、HTTP-FLV 播放,100~200ms 低延遲,支持 Android/iOS/Windows/Linux/Unity | 📱 指揮終端 / 大屏回顯 / 可穿戴設備 | 安防調度、交通監管 |
| 🧠 AI 數據幀接口模塊 | 支持幀級 YUV / RGB 數據回調,提供原始解碼圖像 | 🧠 AI 模型處理器 / YOLOv8 / OCR 模型接入層 | 火點識別、目標檢測、視頻結構化 |
| 🔄 多路轉發模塊(StreamRouter) | 支持拉取前端設備RTSP轉推RTMP或GB28181 | 🌐 調度平臺 / 中控服務器 | 多終端并發調度、遠程協作 |
| 📦 錄像與快照模塊(SmartRecorder) | 支持手動/定時錄像、JPEG 快照、自動命名與上傳、時間戳嵌入 | 📁 存證記錄 / 異常分析 / 審計鏈路 | 安全巡查、事后溯源、AI回溯分析 |
| 🔐 控制與配置接口層 | 支持動態配置碼率、分辨率、GOP、目標地址,支持熱啟動、遠程控制、配置持久化 | ?? 遠程運維系統 / 自主飛控 / 平臺管理后臺 | 云端任務編排、自動化感知部署 |
🧬 能力覆蓋關鍵技術指標
| 指標類別 | 技術支持能力 |
|---|---|
| 📏 視頻格式兼容 | H.264、H.265、AAC、PCM、JPEG |
| 🖥 系統平臺支持 | Android / iOS / Windows / Linux / Unity3D / ARM |
| 🔁 推送協議支持 | RTSP / RTMP / HTTP-FLV |
| ? 傳輸延遲能力 | RTSP播放器低、RTMP推流播放端到端低至 200ms |
| 🧠 AI對接能力 | 提供幀級圖像數據 + 時間戳同步 + 多通道切換 |
| 📦 部署形態 | 本地SDK集成 / 跨平臺打包 / 云邊混合部署 |
🧱 系統架構圖:DaniuSDK × Low-Altitude Perception
以下是典型低空視頻感知系統架構圖,展示了從終端到平臺、從邊緣到中心的視頻鏈路閉環構建路徑(英文):
+---------------------------+| AI Perception Platform || (Cloud / Edge) |+------------+--------------+↑[YUV/RGB Frame Callback]↑+----------------+----------------+| SmartPlayer SDK (Viewer) || Android / iOS / Windows |+----------------+----------------+↑[RTSP / RTMP / HTTP-FLV]↑+----------------+----------------+| SmartPublisher SDK (Streamer) || + Light RTSP Server (optional) |+----------------+----------------+↑+-----------------------------------+| UAV / Robot / Smart Terminal || - 4K Camera Sensor || - ARM Linux / Android / RTOS |+-----------------------------------+
🎯 架構亮點:
-
靈活部署:模塊支持混合加載,輕量 RTSP 服務可嵌入低內存占用場景;
-
極簡接入:提供統一 API 封裝,適配 JNI / C++ / C# / Unity / Python;
-
高穩定性:已在森林防火、無人巡檢、電力系統等場景穩定運行多年;
-
AI Ready:支持與 YOLO、DeepStream、OpenVINO 等 AI 框架對接,開箱即用。
🚁 第四部分:典型場景落地案例 —— 從技術能力到實戰閉環
大牛直播SDK 已在全國多個行業應用中完成部署落地,涵蓋能源、電力、應急、環保、安防等領域,成功支撐了從前端感知到后端分析的完整視頻鏈路閉環。
以下為幾個具代表性的典型案例:
? 案例 1:國家電網 × 無人機電力線路巡檢系統
| 內容 | 說明 |
|---|---|
| 📌 項目背景 | 高壓輸電線路需定期巡檢,傳統人工作業效率低、風險高,亟需部署無人化、智能化巡檢系統。 |
| 🛠 部署方案 | 每架無人機搭載高清相機 + ARM嵌入模塊,運行大牛直播SDK推流模塊與輕量級RTSP服務,圖像實時傳回地面控制站;地面站使用播放器SDK低延遲預覽,支持AI識別異常點。 |
| 🔍 關鍵模塊 | SmartPublisher + SmartPlayer + AI圖像幀接口 + 錄像模塊 |
? 案例 2:應急管理局 × 空地一體應急調度平臺
| 內容 | 說明 |
|---|---|
| 📌 項目背景 | 應對突發災害(如山體滑坡/爆炸事故)需快速部署空中可視化系統,實現遠程指揮。 |
| 🛠 部署方案 | 多架無人機同步起飛,通過 4G/5G 網絡推流至調度中心,使用大牛直播SDK的 RTMP 推流 + 多路轉發模塊,實現多視角同步顯示。 |
| 🔍 關鍵模塊 | RTMP推流模塊 + RTSP轉RTMP推送模塊+ HTTP-FLV播放模塊 + 錄像模塊 |
? 案例 3:林區 × 智能林火預警系統
| 內容 | 說明 |
|---|---|
| 📌 項目背景 | 林區通信基礎設施薄弱,火點識別難、傳輸慢,急需部署具備本地識別與遠程回傳能力的視頻鏈路。 |
| 🛠 部署方案 | 通過四足機器人和定點無人機結合,部署大牛直播SDK在本地完成視頻采集、編碼與緩存,火點識別后通過離線觸發推流。 |
| 🔍 關鍵模塊 | 本地RTSP Server + 預錄緩存 + YOLO圖像識別對接 + 快照上傳 |
? 案例 4:濱海防控 × 無人艇海岸線巡航系統
| 內容 | 說明 |
|---|---|
| 📌 項目背景 | 無人艇在海岸線遠距離巡邏中,面臨帶寬不穩定與視距遠的問題,需視頻系統具備強抗抖、斷點續傳能力。 |
| 🛠 部署方案 | 大牛直播SDK推流模塊啟用 輕量級RTSP服務模式,在船體嵌入平臺運行,并部署本地錄像 |
| 🔍 關鍵模塊 | 輕量RTSP服務 + RTSP播放模塊 + 錄像模塊 |
? 案例 5:化工園區 × 四足機器人智能巡檢系統
| 內容 | 說明 |
|---|---|
| 📌 項目背景 | 危險化工廠區存在高溫、有毒等風險,需部署高頻次、無人值守的自主巡檢機器人。 |
| 🛠 部署方案 | 機器人內置攝像頭采集視頻,運行大牛直播SDK實現輕量級RTSP服務 + 快照本地存儲,并通過圖像識別模型自動標注異常點。 |
| 🔍 關鍵模塊 | 輕量級RTSP服務 + RTSP播放模塊 +?快照模塊 + 錄像存儲 + AI對接接口 |
🧾 小結:從落地到普及,SDK模塊化成就“視頻神經中樞”
通過這些典型案例可以看出,大牛直播SDK的模塊能力具備:
-
? 平臺可移植:兼容嵌入式Linux、Android、Windows;
-
? 鏈路可組合:根據場景自由選配推流/轉發/播放器/AI幀輸出;
-
? 部署可擴展:支持從單點部署到集群并發、多邊協同;
-
? 通信可自適應:在低帶寬、斷網環境下,盡量保持數據完整性與可用性。
它不再只是“一個視頻工具”,而是面向低空智能系統構建的標準通感能力單元,正加速成為未來低空平臺的“視覺神經基建”。
🔚 第五部分:總結與展望 —— 讓“視頻感知能力”成為低空系統的默認基礎設施
在低空經濟從試點驗證走向體系化布局的轉型過程中,視頻感知能力的標準化構建正成為行業普遍共識。從單點巡檢到全域布控,從離線回傳到實時互動,未來的空中平臺、機器人系統、邊緣節點,都需要具備一個共同的能力底座——“視頻+AI”感知通路的穩定輸出能力。
大牛直播SDK,作為一套面向工業級視頻系統構建而設計的底層能力組件,正在以其 模塊化、低延遲、高適配性 的特點,成為各類低空感知系統中不可替代的“視頻基礎設施單元”。
🎯 我們看到了這些變化正在發生:
-
? 每一架無人機、每一臺機器人,都在變成移動的視覺神經元
-
? 實時視頻流,已成為 AI 系統理解世界的第一輸入信號
-
? 低延遲、跨平臺的視頻鏈路,是遠程協同與智能決策的起點
🚀 展望未來:視頻通感能力將在以下方向持續演進
| 方向 | 趨勢 | SDK布局 |
|---|---|---|
| 空天地一體協同鏈路 | 無人機 + 移動網絡 + 地面終端構成閉環 | SDK支持多協議推送和播放 |
| 邊云協同 AI 識別鏈路 | 視頻邊緣識別+云端大模型理解 | 提供幀級 YUV/RGB 輸出 + 快照推送 |
| 視頻感知與控制閉環融合 | 從視頻觀察到視頻驅動決策執行 | 播放端支持AI融合反饋、標注回傳 |
| SDK 與新硬件平臺融合 | 國產芯片、Jetson等異構芯片興起 | SDK提供靜態庫/NDK/JNI等多種適配形態 |
| 視頻鏈路即服務(VaaS) | 視頻能力通過接口服務化提供 | SDK支持私有云部署 |
🧩 視頻不是附屬功能,而是智能感知系統的“輸入層”
大牛直播SDK的設計理念,從一開始就不是“播放器”或“推流工具”,而是為了解決:
如何讓一幀視頻數據,從攝像頭采集開始,就具備被AI理解、被人實時感知、被系統調度控制的能力。
這也意味著,大牛直播SDK不僅僅是某個“視頻模塊”的集合,而是面向未來低空智能體系的視頻感知標準棧,具備在更大范圍、更深層系統中持續演化與嵌入的能力。
? 寫在最后:讓“每一幀看見”,成為“每一次決策”的起點
📡 從城市上空到邊境海岸,從管道廊道到林區深處,大牛直播SDK 正在幫助越來越多的無人化平臺,完成從“能拍”到“看懂”再到“實時響應”的閉環構建。
未來已來,感知在前。
讓視頻成為系統的“眼睛”,讓每一幀數據都成為智能的可能。?
📎 CSDN官方博客:音視頻牛哥-CSDN博客







和ref()的用法)




)






