在本示例中,我們將學習如何:
-
向場景中添加額外的相機并將其安裝在機器人上
-
添加相機發布器(Camera Publishers)
-
通過 rostopics 發送真實的合成感知數據(ground truth synthetic perception data)
前提條件
-
已完成 ROS 的安裝:包括安裝 ROS,啟用 ROS 擴展,構建提供的 Isaac Sim ROS 工作區,并設置必要的環境變量。
-
了解 ROS 主題(rostopic)的基本知識,以及發布器(Publisher)和訂閱器(Subscriber)是如何工作的。
-
已完成 OmniGraph 和 添加相機與傳感器(Add Camera and Sensors)的教程。
-
已完成 URDF 導入(TurtleBot)和通過 ROS 消息控制 TurtleBot 的教程,確保場景中已加載好一個 TurtleBot。
-
roscore正在運行。
1. 相機發布器(Camera Publisher)
設置相機(Setting up Cameras)
????????在視圖中默認顯示的相機是“透視相機”(Perspective Camera)。你可以通過視圖窗口左上角的“Camera”按鈕來確認這一點。點擊“Camera”按鈕后,你會看到其他一些預設的相機視角,例如:頂部視角(Top)、正面視角(Front)和右側視角(Right Side)。
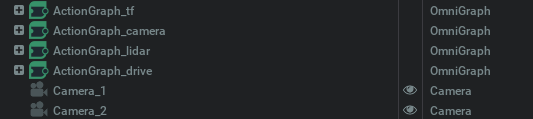
????????為了本教程的目的,我們將添加兩個固定(stationary)相機,命名為 Camera_1 和 Camera_2,它們將從不同的角度觀察房間。添加相機到舞臺的具體方法可以參考“添加相機與傳感器(Add Camera and Sensors)”教程。
????????你可能希望打開多個視圖窗口(Viewports)以同時查看多個相機視角。打開額外視圖窗口的方法如下:
????????依次點擊 Window -> Viewport -> Viewport 2 打開新的視圖窗口,并在該視圖窗口的左上角點擊 “Camera” 按鈕,選擇你想要顯示的相機視角。
./isaac-sim.sh --/rendergraph/mgpu/backend=copyQueue --/app/gatherRenderResults=1 --/app/uiGather=0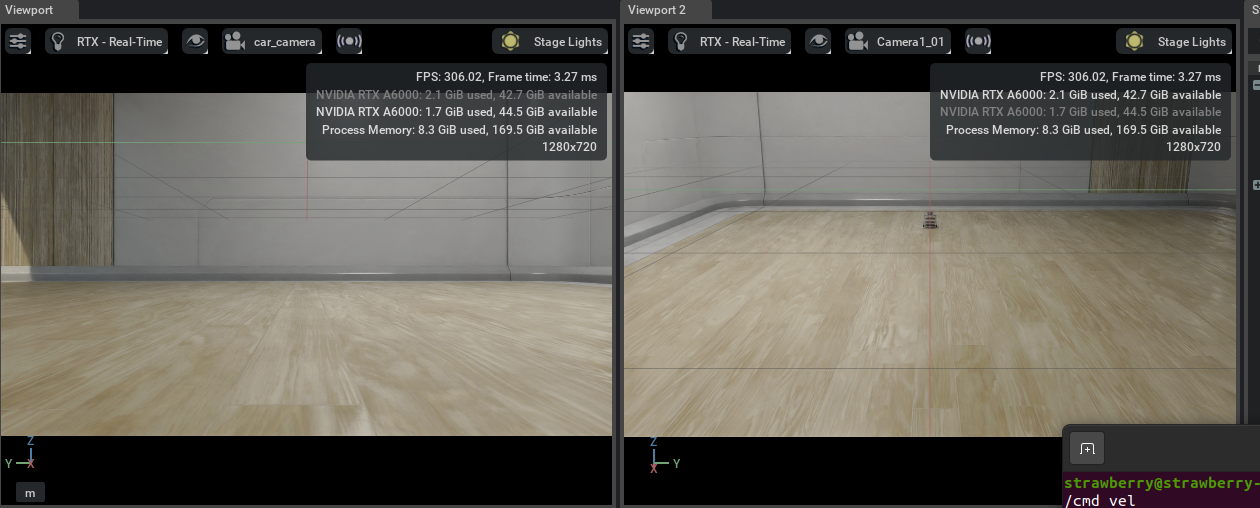
一個相機在墻上,一個相機和小車綁定,運行上節的ros命令就可以控制小車移動
為 RGB 圖像發布器構建圖
-
打開可視化腳本編輯器(Visual Scripting):
點擊菜單欄中的Window > Visual Scripting > Action Graph。 -
新建或編輯 Action Graph:
在 Action Graph 窗口中,點擊中間的“新建 Action Graph(New Action Graph)”圖標,
如果你想將相機發布器添加到已有的圖中,也可以點擊“編輯 Action Graph(Edit Action Graph)”。 -
構建 Action Graph:
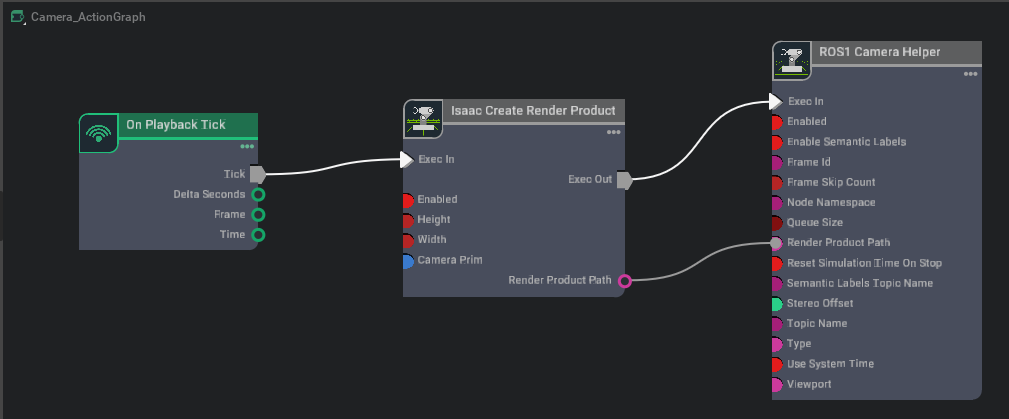
根據下圖所示,創建包含各個節點及其連接關系的圖,
并按照下方表格設置每個節點的參數。
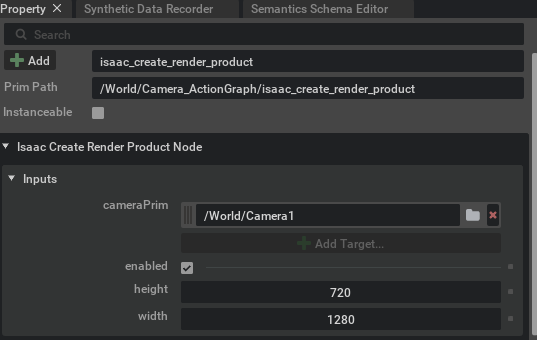
這里要選到相機本體,不能選到相機的xform
圖的說明(Graph Explained)
Isaac Create Render Product
此節點用于創建一個渲染產品(Render Product)對象,從指定的攝像機節點(camera prim)獲取渲染數據,并輸出渲染產品的路徑。你可以通過勾選或取消 enabled 字段來啟用或禁用該渲染。
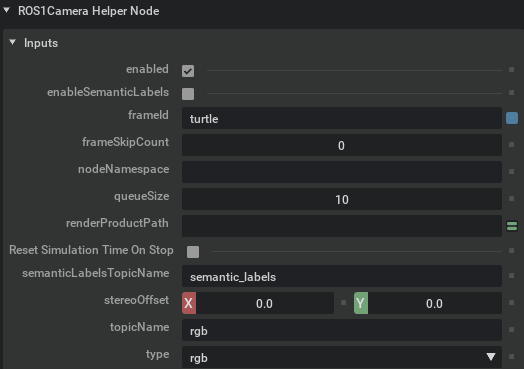
ROS1 Camera Helper
該節點用于指定發布的數據類型(如 RGB 圖像),并定義將其發布到哪個 ROS 話題(rostopic),以及設置該消息所用的坐標系幀(frameId)。
Camera Helper 節點說明(Camera Helper Node)
Camera Helper 節點實際上封裝了一個復雜的后處理網絡,使用戶無需手動構建底層圖。
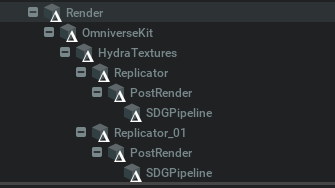
當你點擊 “播放(Play)” 并且圖中包含 Camera Helper 節點時,會自動生成一個新的圖。你可以在 Action Graph 窗口左上角的圖標列表中看到它,路徑為:
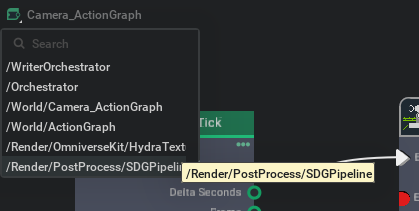
/Render/PostProcess/SDGPipeline
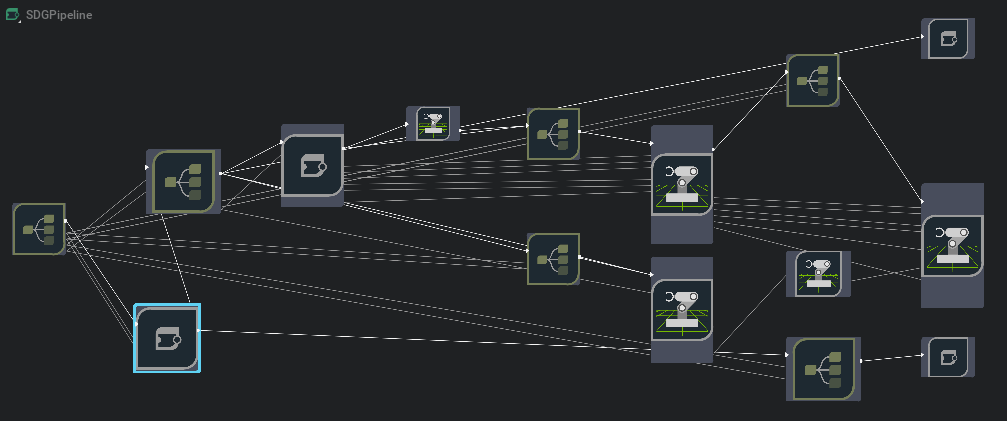
這個圖是由 Camera Helper 節點自動創建的,它的作用是:
-
從你用
Isaac Create Render Product節點創建的 Render Product 中,拉取原始渲染幀(也就是相機拍到的像素數據) -
把渲染幀做一系列加工:格式轉換(比如從 GPU buffer 轉成 CPU 可讀的圖像)、必要的打包或壓縮、以及你在 Helper 節點里指定的深度圖、語義分割、RGB 等模式對應的處理。
-
最后把處理好的數據打包成 ROS 消息(sensor_msgs/Image、sensor_msgs/CameraInfo 等),并發送到你在
ROS1 Camera Helper節點里配置的/rgb話題。
?? 注意:這個圖只在當前會話(session)中有效,不會被保存為你的資產(asset)的一部分,也不會出現在 Stage 樹中。
深度與其他感知真值數據
除了 RGB 圖像外,任何相機還可獲取以下合成傳感器和感知信息:
-
相機信息(Camera Info)
包含相機內參(焦距、光學中心、畸變系數等),便于后續做幾何校正或點云投影。 -
深度(Depth)
以每像素深度圖形式輸出,從相機到場景中各像素點的距離(單位通常是米)。 -
點云(Point Cloud)
將深度信息和相機內參結合,生成三維點集,可以更直觀地做空間感知和障礙物檢測。
在進行以下“邊界框”和“語義標注”發布前,請先參考Isaac Sim Replicator教程,學習如何給場景添加語義標簽(semantic annotation):
-
2D 緊邊界框(BoundingBox?2D?Tight)
-
2D 松邊界框(BoundingBox?2D?Loose)
-
3D 邊界框(BoundingBox?3D)
-
語義標簽(Semantic labels)
-
實例標簽(Instance labels)
每個 Camera Helper 節點 一次只能檢索一種數據類型。你在節點屬性面板的 type 下拉菜單中選定后:
-
啟動仿真、生成底層
/Render/PostProcessing/SDGPipeline -
該節點就鎖定為所選類型,無法再修改重用
-
如果要改類型,只能新建另一個 Camera Helper,或重新加載 Stage(重建管道)
在 Isaac Sim 自帶的示例場景中,有一個同時為多臺相機發布多個話題的完整案例,路徑為:
Isaac/Samples/ROS/Scenario/turtlebot_tutorial.usd
你可以打開它,看看是如何組織多個 Camera Helper、分別輸出 RGB、Depth、Segmentation、BoundingBox 等話題的。
2.驗證 ROS 連接
-
使用以下命令來查看正在傳輸的原始消息:
rostopic echo /rgb 你會在終端中看到該話題上不斷刷新的原始數據。
你會在終端中看到該話題上不斷刷新的原始數據。 - 查看發布的圖像:在新的終端中(已
source好 ROS 環境),確保roscore正在運行,模擬器也在“Play”狀態。運行下面的命令:rosrun image_view image_view image:=/rgb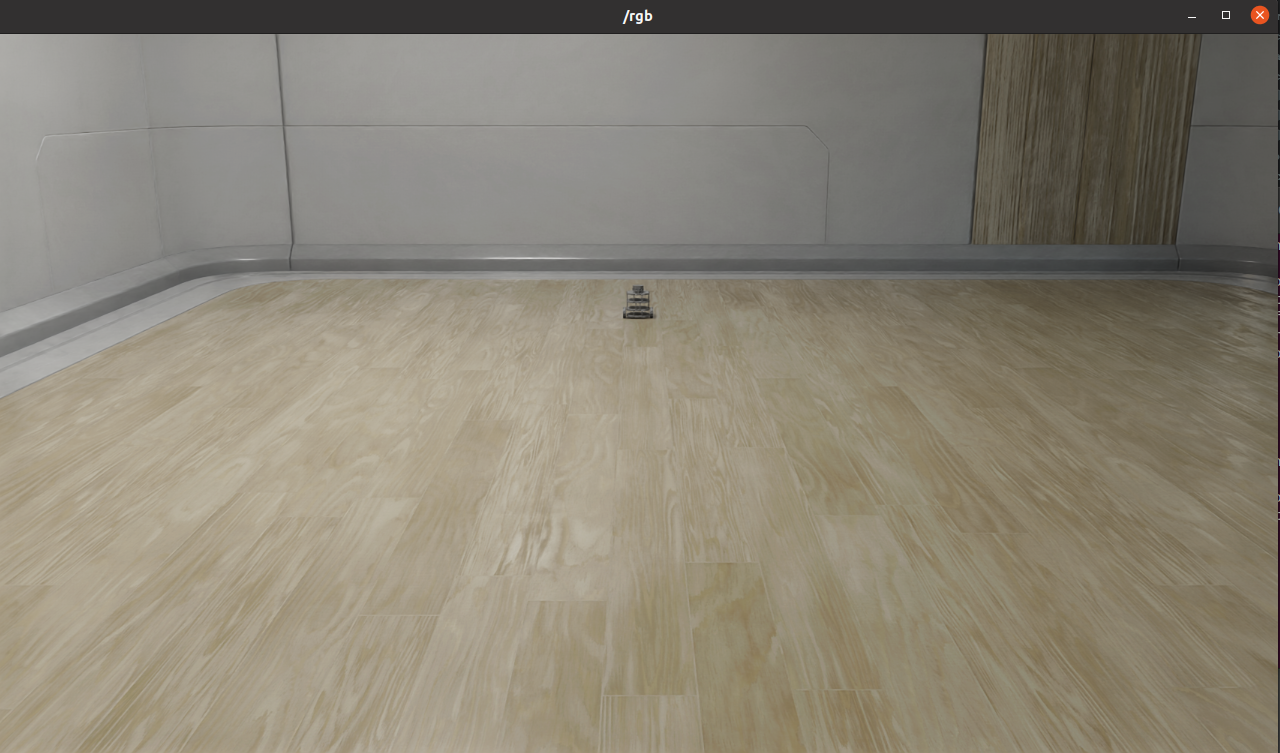 這樣就能打開一個窗口,實時顯示發布到
這樣就能打開一個窗口,實時顯示發布到 /rgb話題的圖像——它應當和你在視口里看到的畫面一模一樣。
如果你在視口中移動攝像機,圖片也會同步“搖擺”,就像為你的仿真環境開了場“直播”!
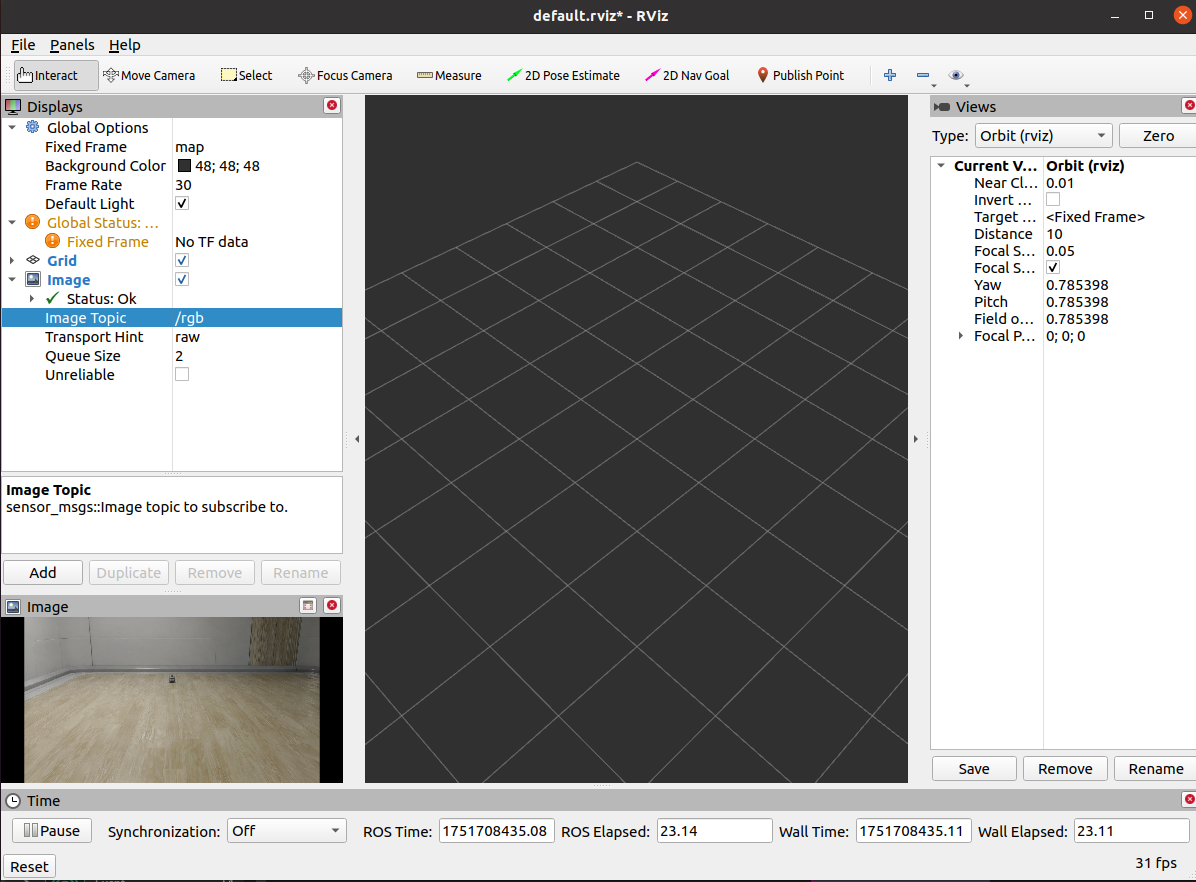
我們也可以在?RViz?中查看圖像:
-
打開一個新的終端,并?source?好你的?ROS?環境;
-
輸入命令:rviz
-
在左側?Displays?面板中,點擊 “Add” → 選擇 “Image”
-
在新加入的?Image?Display 項里,將其?Topic?字段設置為與你在?Camera Helper?節點中配置的?topicName?一致——在本例中即:/rgb
這樣你就能在 RViz 中實時看到從仿真相機發布出來的圖像流啦!
如果遇到了問題,可以刪除render,重建圖,然后play,每次都會創建新的replicator,有些報錯可以這樣解決,甚至重啟一個isaacsim。
我第一次rviz也沒有出現rgb的圖像,然后一查發現
rosrun image_view image_view image:=/rgb 這個圖像也不會出現了,rostopic echo /rgb也沒內容了,不知道什么原因,重啟之后重新play就都解決了
3.?ROS時鐘
在本例中,我們將:
-
簡要討論ROS時鐘的發布者和訂閱者
-
發布仿真時間作為Clock消息到ROS
-
訂閱ROS Clock消息
仿真時間與時鐘
????????為了使外部ROS節點與仿真時間同步,通常會使用一個時鐘話題。許多ROS節點(例如RViz)使用參數use_sim_time,當設置為True時,它將指示節點開始訂閱/clock話題,并與發布的仿真時間同步。這個參數可以通過ROS啟動文件或命令行界面進行設置。稍后我們將看到如何在終端中設置該參數,并觀察它對某些ROS節點的影響。
運行ROS時鐘發布者
操作步驟
-
創建Action圖:
-
轉到 Create -> Visual Scripting -> Action Graph 來創建一個Action圖。
-
-
將以下OmniGraph節點添加到Action圖中:
-
On Playback Tick節點:每個仿真幀執行其他圖節點。
-
Isaac Read Simulation Time節點:用于獲取當前仿真時間。注意:默認情況下,仿真時間是單調遞增的,這意味著無論仿真是否暫停并重新播放,時間都會繼續增加。這主要是為了防止仿真重置時時間倒退的問題。如果希望仿真重置時從0開始,可以將
resetOnStop設置為True。 -
ROS1 Publish Clock節點:用于將仿真時間發布到
/clock話題。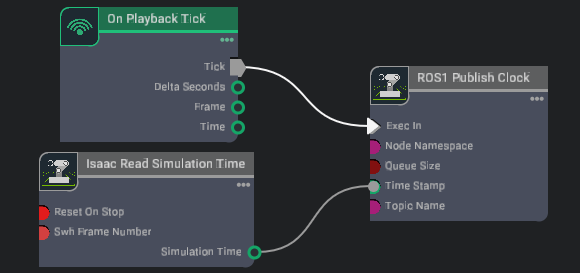
-
-
ROS Clock發布器:
-
以上配置后,ROS1發布時鐘信息,其他ROS節點可以通過訂閱
/clock話題來獲取仿真時間并同步。 -
輸入以下命令來啟動RViz:
rosrun rviz rviz注意RViz窗口底部顯示的 ROS Time 和 ROS Elapsed Time,這些值目前顯示的是Wall 時間,應與 Wall Time 和 Wall Elapsed 字段相匹配。

- 在一個新的ROS終端中,使用以下命令將 use_sim_time 參數設置為
true,以確保RViz使用仿真時間。rosparam set /use_sim_time true
確保在設置之前Isaac Sim的仿真是停止的。 - ?關閉RViz并重新啟動,這時你會注意到 ROS Time 和 ROS Elapsed Time 都會顯示為0。

- 點擊 Play 啟動Isaac Sim仿真。在RViz中,ROS Time 會與從Isaac Sim通過
/clock話題發布的仿真時間相匹配。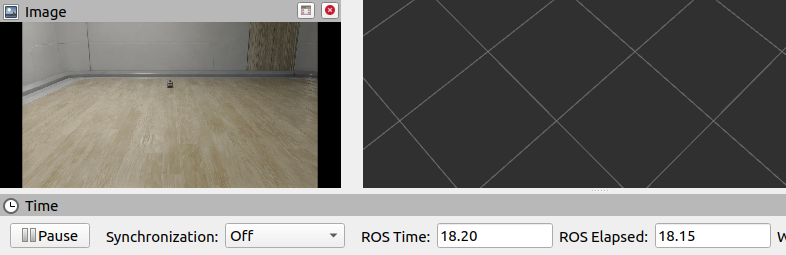
-
發布系統時間
盡管發布仿真時間是最常見的工作流程,但某些工作流可能需要消息包含系統時間。要通過時鐘話題發布系統時間,請按照以下步驟操作:
-
創建Action圖:
-
轉到 Create -> Visual Scripting -> Action Graph 來創建一個Action圖。
-
-
將以下OmniGraph節點添加到Action圖中:
-
On Playback Tick節點:每個仿真幀執行其他圖節點。
-
Isaac Read System Time節點:用于獲取當前系統時間。
-
ROS1 Publish Clock節點:將系統時間發布到
/clock話題。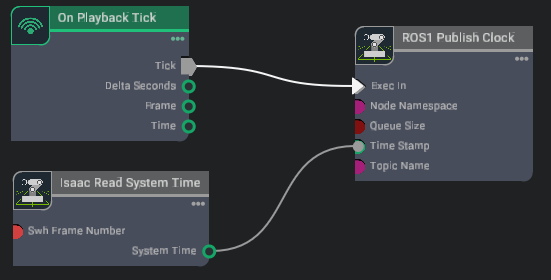
-
-
ROS時鐘發布器(帶系統時間):
-
配置上述節點后,系統時間將通過
/clock話題發布。
-
-
在Isaac Sim中點擊Play:
-
啟動Isaac Sim仿真后,可以在ROS終端中使用以下命令查看從Isaac Sim發布的系統時間:
rostopic echo /clock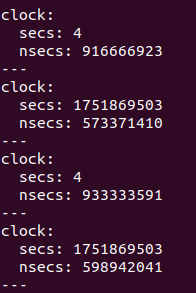
-
相機助手和RTX激光雷達節點
-
在之前的教程中你已經見過 ROS Camera Helper 節點,而在后續教程中你將見到 ROS RTX Lidar Helper 節點。
-
這兩個節點都會自動生成一個傳感器發布管道。為了確保它們的發布器使用系統時間,請確保將它們的
useSystemTime輸入設置為True。
運行ROS時鐘訂閱者
-
創建Action圖:
-
打開一個新的場景,轉到 Create -> Visual Scripting -> Action Graph 來創建一個新的Action圖。
-
-
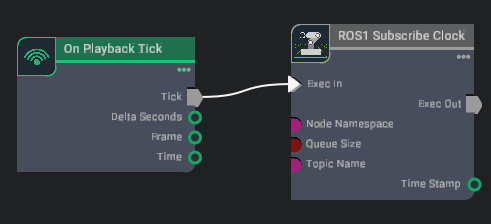
將以下OmniGraph節點添加到Action圖中:
-
On Playback Tick節點:每個仿真幀執行其他圖節點。
-
ROS1 Subscribe Clock節點:訂閱外部時間戳數據。
-
-
啟動仿真:
-
點擊 Play 啟動仿真后,選擇Action圖中的 ROS1 Subscribe Clock節點,在屬性窗口中查看它的
timeStamp輸出。此時,時間戳應為0。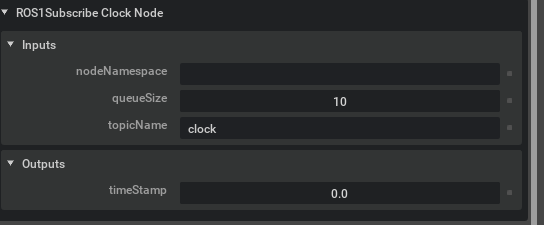
-
-
手動發布時鐘消息:
-
在一個新的ROS終端中運行以下命令手動發布時鐘消息一次:
rostopic pub -1 /clock rosgraph_msgs/Clock "clock: { secs: 1, nsecs: 200000000 }"執行后,ROS1 Subscribe Clock OmniGraph節點中的
timeStamp值應更改為1.2。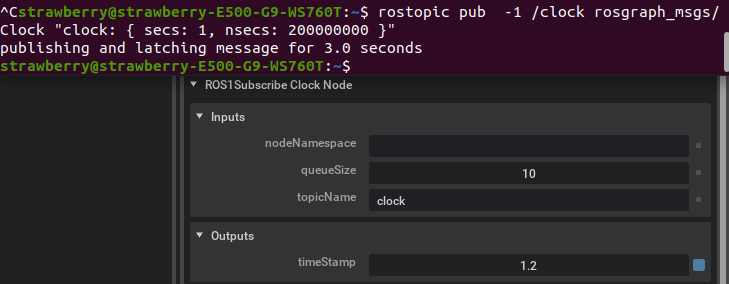
-
你可以更改發布命令中的
secs和nsecs值,觀察這些值如何反映在 ROS1 Subscribe Clock OmniGraph節點的timeStamp字段中。例如:rostopic pub -1 /clock rosgraph_msgs/Clock "clock: { secs: 3, nsecs: 500000000 }"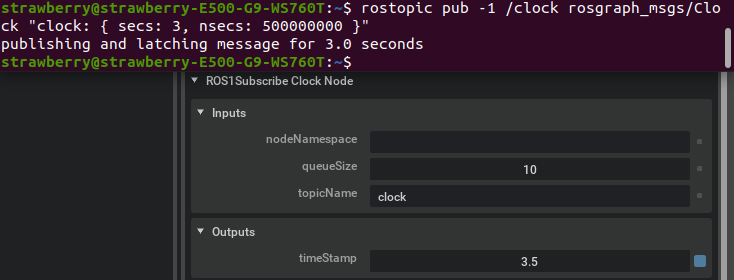
-

)
介紹及實現原理)








之使用教程(2)創建事件)







