一、引言
在數字圖像處理中,插值是一種基本且重要的技術,它廣泛應用于圖像縮放、旋轉、幾何變換等場景。OpenCV作為最流行的計算機視覺庫之一,提供了多種插值方法供開發者選擇。本文將全面介紹OpenCV中的插值技術,包括各種方法的原理、適用場景以及實際代碼示例,幫助讀者深入理解并正確應用這些技術。
二、插值的基本概念
2.1 什么是圖像插值
圖像插值是指根據已知像素點的值,通過某種數學方法估計未知位置像素值的過程。當我們需要改變圖像尺寸(放大或縮小)或者對圖像進行幾何變換(如旋轉、透視變換)時,新圖像中的像素位置在原圖像中可能沒有對應的整數坐標位置,這時就需要使用插值技術來計算這些非整數位置的像素值。
2.2 為什么需要插值
-
圖像縮放:放大圖像時需要增加新的像素點,縮小圖像時需要減少像素點
-
幾何變換:旋轉、扭曲等變換后,像素位置發生變化
-
圖像配準:將不同圖像對齊到同一坐標系
-
視角變換:如透視變換、仿射變換等
三、OpenCV中的主要插值方法
OpenCV中常用的插值方法主要通過cv::InterpolationFlags枚舉定義,主要包括以下幾種:
3.1 最近鄰插值(INTER_NEAREST)
原理:選擇距離目標點最近的已知像素點的值作為插值結果。
數學表達:
![]() ?
?
特點:
-
計算簡單,速度快
-
會產生鋸齒狀的邊緣(階梯效應)
-
不連續,可能導致圖像質量下降
適用場景:
-
對實時性要求高的場景
-
對圖像質量要求不高的場合
-
某些特殊效果需要保留像素感的處理
代碼示例:
import cv2
import numpy as np# 讀取圖像
img = cv2.imread('input.jpg')# 使用最近鄰插值放大圖像
resized_nearest = cv2.resize(img, None, fx=2, fy=2, interpolation=cv2.INTER_NEAREST)cv2.imshow('Nearest Neighbor', resized_nearest)
cv2.waitKey(0)
cv2.destroyAllWindows()3.2 雙線性插值(INTER_LINEAR)
原理:利用目標點周圍4個最近鄰像素點的值,在水平和垂直方向分別進行線性插值。

?
數學表達:
 ?
?
特點:
-
計算量適中
-
結果比最近鄰插值平滑
-
邊緣可能稍微模糊
-
OpenCV中默認的插值方法
適用場景:
-
大多數常規的圖像縮放操作
-
對圖像質量有一定要求但不需要極高精度的場合
代碼示例:
# 使用雙線性插值放大圖像
resized_linear = cv2.resize(img, None, fx=2, fy=2, interpolation=cv2.INTER_LINEAR)cv2.imshow('Bilinear', resized_linear)
cv2.waitKey(0)
cv2.destroyAllWindows()3.3 雙三次插值(INTER_CUBIC)
原理:使用目標點周圍16個最近鄰像素點的值,通過三次多項式進行插值。
與雙線性插值法相同,該方法也是通過映射,在映射點的鄰域內通過加權來得到放大圖像中的像素值。不同的是,雙三次插值法需要原圖像中近鄰的16個點來加權。 ?
?目標像素點與原圖像的像素點的對應公式如下所示:
?
?下面我們舉例說明,假設原圖像A大小為m*n,縮放后的目標圖像B的大小為M*N。其中A的每一個像素點是已知的,B是未知的,我們想要求出目標圖像B中每一個像素點(X,Y)的值,必須先找出像素(X,Y)在原圖像A中對應的像素(x,y),再根據原圖像A距離像素(x,y)最近的16個像素點作為計算目標圖像B(X,Y)處像素值的參數,利用BiCubic基函數求出16個像素點的權重,圖B像素(x,y)的值就等于16個像素點的加權疊加。
?假如下圖中的P點就是目標圖像B在(X,Y)處根據上述公式計算出的對應于原圖像A中的位置,P的坐標位置會出現小數部分,所以我們假設P點的坐標為(x+u,y+v),其中x、y表示整數部分,u、v表示小數部分,那么我們就可以得到其周圍的最近的16個像素的位置,我們用a(i,j)(i,j=0,1,2,3)來表示,如下圖所示。
?
?然后給出BiCubic函數:
?
?我們要做的就是將上面的16個點的坐標帶入函數中,獲取16像素所對應的權重W(x)。然而BiCubic函數是一維的,所以我們需要將像素點的行與列分開計算,比如a00這個點,我們需要將x=0帶入BiCubic函數中,計算a00點對于P點的x方向的權重,然后將y=0帶入BiCubic函數中,計算a00點對于P點的y方向的權重,其他像素點也是這樣的計算過程,最終我們就可以得到P所對應的目標圖像B在(X,Y)處的像素值為:
?
?依此辦法我們就可以得到目標圖像中所有的像素點的像素值。
數學表達:
基于雙三次多項式函數,計算復雜度高于雙線性插值。
特點:
-
計算量較大
-
結果比雙線性插值更平滑
-
邊緣保持較好
-
可能產生過沖現象(overshooting)
適用場景:
-
對圖像質量要求較高的放大操作
-
需要較好保持邊緣細節的場景
代碼示例:
# 使用雙三次插值放大圖像
resized_cubic = cv2.resize(img, None, fx=2, fy=2, interpolation=cv2.INTER_CUBIC)cv2.imshow('Bicubic', resized_cubic)
cv2.waitKey(0)
cv2.destroyAllWindows()3.4 像素區域插值(INTER_AREA)
原理:基于像素區域關系進行重采樣,縮小圖像時效果較好。
?當使用像素區域插值方法進行放大圖像時,如果圖像放大的比例是整數倍,那么其工作原理與最近鄰插值類似;如果放大的比例不是整數倍,那么就會調用雙線性插值進行放大。
?其中目標像素點與原圖像的像素點的對應公式如下所示:
?
?其中,dstX表示目標圖像中某點的x坐標,srcWidth表示原圖的寬度,dstWidth表示目標圖像的寬度;dstY表示目標圖像中某點的y坐標,srcHeight表示原圖的高度,dstHeight表示目標圖像的高度。而srcX和srcY則表示目標圖像中的某點對應的原圖中的點的x和y的坐標。
特點:
-
縮小圖像時能有效避免波紋出現
-
放大圖像時類似于最近鄰插值
-
計算速度較快
適用場景:
-
圖像縮小操作的首選方法
-
需要保持圖像能量(避免波紋)的場景
代碼示例:
# 使用區域插值縮小圖像
resized_area = cv2.resize(img, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_AREA)cv2.imshow('Area', resized_area)
cv2.waitKey(0)
cv2.destroyAllWindows()3.5 Lanczos插值(INTER_LANCZOS4)
原理:使用8x8鄰域和Lanczos窗口函數進行插值。
Lanczos插值方法與雙三次插值的思想是一樣的,不同的就是其需要的原圖像周圍的像素點的范圍變成了8*8,并且不再使用BiCubic函數來計算權重,而是換了一個公式計算權重。 ?
?權重公式:
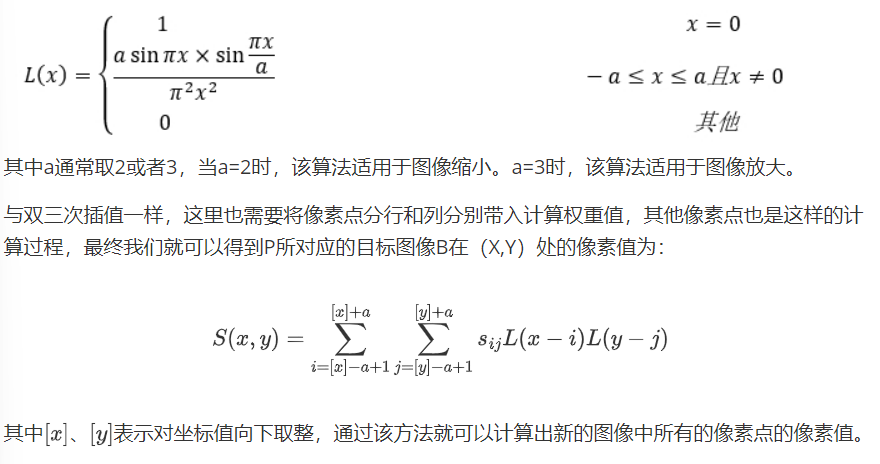
特點:
-
計算量最大
-
結果最精確
-
能很好地保留高頻信息
-
可能產生振鈴效應
適用場景:
-
對圖像質量要求極高的場合
-
科學圖像處理
-
醫學圖像處理
代碼示例:
# 使用Lanczos插值放大圖像
resized_lanczos = cv2.resize(img, None, fx=2, fy=2, interpolation=cv2.INTER_LANCZOS4)cv2.imshow('Lanczos', resized_lanczos)
cv2.waitKey(0)
cv2.destroyAllWindows()四、插值方法性能比較
4.1 視覺質量比較
| 方法 | 平滑度 | 邊緣保持 | 計算復雜度 | 適用場景 |
|---|---|---|---|---|
| 最近鄰 | 低 | 差 | 最低 | 實時系統,像素藝術 |
| 雙線性 | 中 | 一般 | 低 | 常規縮放,默認選擇 |
| 雙三次 | 高 | 好 | 中 | 高質量放大 |
| 區域 | 縮小好 | 縮小好 | 低 | 圖像縮小首選 |
| Lanczos | 最高 | 最好 | 高 | 極高精度需求 |
4.2 計算效率比較
一般來說,計算效率從高到低排序為:
最近鄰 > 區域 > 雙線性 > 雙三次 > Lanczos
4.3 實際應用建議
-
圖像放大:
-
一般情況:雙線性插值(平衡質量和速度)
-
高質量需求:雙三次或Lanczos插值
-
實時系統:最近鄰插值
-
-
圖像縮小:
-
首選區域插值(避免鋸齒和波紋)
-
次選雙線性插值
-
五、OpenCV中插值的應用場景
5.1 圖像縮放
# 指定輸出尺寸
resized = cv2.resize(img, (width, height), interpolation=cv2.INTER_LINEAR)# 按比例縮放
resized = cv2.resize(img, None, fx=scale_x, fy=scale_y, interpolation=cv2.INTER_AREA)5.2 圖像旋轉?
# 獲取旋轉矩陣
M = cv2.getRotationMatrix2D(center, angle, scale)
# 應用旋轉
rotated = cv2.warpAffine(img, M, (w, h), flags=cv2.INTER_CUBIC)5.3 透視變換?
M = cv2.getPerspectiveTransform(src_pts, dst_pts)
warped = cv2.warpPerspective(img, M, (width, height), flags=cv2.INTER_LINEAR)5.4 重映射(remap)?
map_x, map_y = ... # 創建映射矩陣
remapped = cv2.remap(img, map_x, map_y, interpolation=cv2.INTER_LANCZOS4)六、高級話題與優化技巧
6.1 插值方法的組合使用
在某些場景下,可以組合使用不同的插值方法。例如,可以先使用區域插值縮小圖像,再使用雙三次插值進行放大,以獲得更好的效果。
# 先縮小再放大
small = cv2.resize(img, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_AREA)
enlarged = cv2.resize(small, None, fx=2, fy=2, interpolation=cv2.INTER_CUBIC)6.2 自定義插值核
OpenCV允許開發者自定義插值核函數,實現特定的插值效果:
def custom_interpolation(src, dst_size):# 實現自定義插值邏輯pass6.3 多通道圖像處理
對于彩色圖像,OpenCV會自動對每個通道分別應用插值方法,無需特別處理:
# 彩色圖像插值與灰度圖像處理方式相同
resized_color = cv2.resize(color_img, (new_w, new_h), interpolation=cv2.INTER_LINEAR)6.4 性能優化建議
-
對于視頻處理,考慮使用最近鄰或雙線性插值以保證實時性
-
批量處理時,可以預先計算變換矩陣
-
對于固定參數的幾何變換,可以查找表(LUT)優化
七、實驗對比
為了更好地理解不同插值方法的效果差異,我們進行以下實驗:
import cv2
import numpy as np
import matplotlib.pyplot as plt# 讀取圖像
img = cv2.imread('lena.jpg')
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)# 準備不同插值結果
methods = [('INTER_NEAREST', cv2.INTER_NEAREST),('INTER_LINEAR', cv2.INTER_LINEAR),('INTER_CUBIC', cv2.INTER_CUBIC),('INTER_AREA', cv2.INTER_AREA),('INTER_LANCZOS4', cv2.INTER_LANCZOS4)
]plt.figure(figsize=(15, 10))
for i, (name, method) in enumerate(methods):# 放大圖像resized = cv2.resize(img, None, fx=3, fy=3, interpolation=method)# 顯示結果plt.subplot(2, 3, i+1)plt.imshow(resized)plt.title(name)plt.axis('off')plt.tight_layout()
plt.show()八、總結
OpenCV提供了豐富的插值方法以滿足不同場景的需求。選擇合適的插值方法需要權衡圖像質量、計算效率和具體應用場景。作為開發者,理解各種插值方法的原理和特點是進行高質量圖像處理的基礎。
選擇指南總結:
-
默認選擇:雙線性插值(INTER_LINEAR)在大多數情況下表現良好
-
縮小圖像:優先使用區域插值(INTER_AREA)
-
高質量放大:考慮雙三次插值(INTER_CUBIC)或Lanczos插值(INTER_LANCZOS4)
-
實時處理:最近鄰插值(INTER_NEAREST)速度最快
通過本文的介紹和實驗,希望讀者能夠根據實際需求選擇合適的插值方法,并在OpenCV項目中靈活應用這些技術。
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?






)




)


)



)
