
基于深度學習YOLOv11的盲人障礙物目標檢測:開啟盲人出行新紀元
在全球范圍內,盲人及視覺障礙者的出行問題一直是社會關注的重點。盡管技術不斷進步,許多城市的無障礙設施依然未能滿足盲人出行的實際需求。尤其是在復雜的城市環境中,盲人面臨的障礙物檢測問題更加嚴峻。傳統的障礙物識別方法存在準確率低、實時性差等問題,亟待一種智能化的解決方案。
痛點:盲人出行面臨的障礙
對于盲人來說,外部環境中的障礙物(如路障、行人、車輛等)直接影響他們的出行安全和效率。傳統的障礙物識別技術往往無法滿足以下需求:
- 低精度檢測:許多障礙物識別系統在動態環境下無法實時準確地檢測出障礙物,導致盲人依賴的智能設備存在較大誤差。
- 實時性差:在復雜的城市環境中,障礙物的位置和類型變化快速,傳統方法難以做到實時反應,影響盲人出行的流暢度。
- 適應性差:盲人行走過程中,障礙物的類型繁多,包括靜態障礙和動態障礙,傳統檢測方法往往不能靈活應對。
這些痛點使得盲人出行的安全性和便捷性大打折扣。
解決方案:YOLOv11深度學習障礙物檢測
隨著深度學習技術的發展,基于YOLO(You Only Look Once)系列算法的目標檢測技術,已經成為解決視覺障礙者出行問題的關鍵技術之一。YOLOv11作為YOLO系列的最新版本,通過其強大的目標檢測能力,能夠在實時環境中準確、高效地識別和定位障礙物,特別適用于盲人導航系統。
YOLOv11的優勢:
- 高精度實時檢測:YOLOv11采用了最新的卷積神經網絡(CNN)架構,通過對圖像的高效處理,能夠實時地檢測和識別盲人行走路徑中的各種障礙物,包括行人、車輛、路障等。無論環境如何變化,YOLOv11都能保證較高的檢測精度。
- 強大的自適應能力:YOLOv11能夠根據環境條件變化(如不同光照、天氣、視距等),自動調整檢測策略,確保在各種條件下依然能夠準確識別障礙物。
- 多目標檢測:YOLOv11不僅能夠檢測靜態障礙物,還能夠實時跟蹤動態障礙物(如移動的行人、車輛等),對于盲人來說,確保可以感知到周圍環境的變化,及時避開潛在危險。
- 低延遲、高效性:YOLOv11優化了模型的推理速度,能夠在邊緣設備(如智能手杖、穿戴設備等)上實現快速響應,保證盲人在行走過程中隨時獲得障礙物的警告信息。
完整數據集:助力精確模型訓練
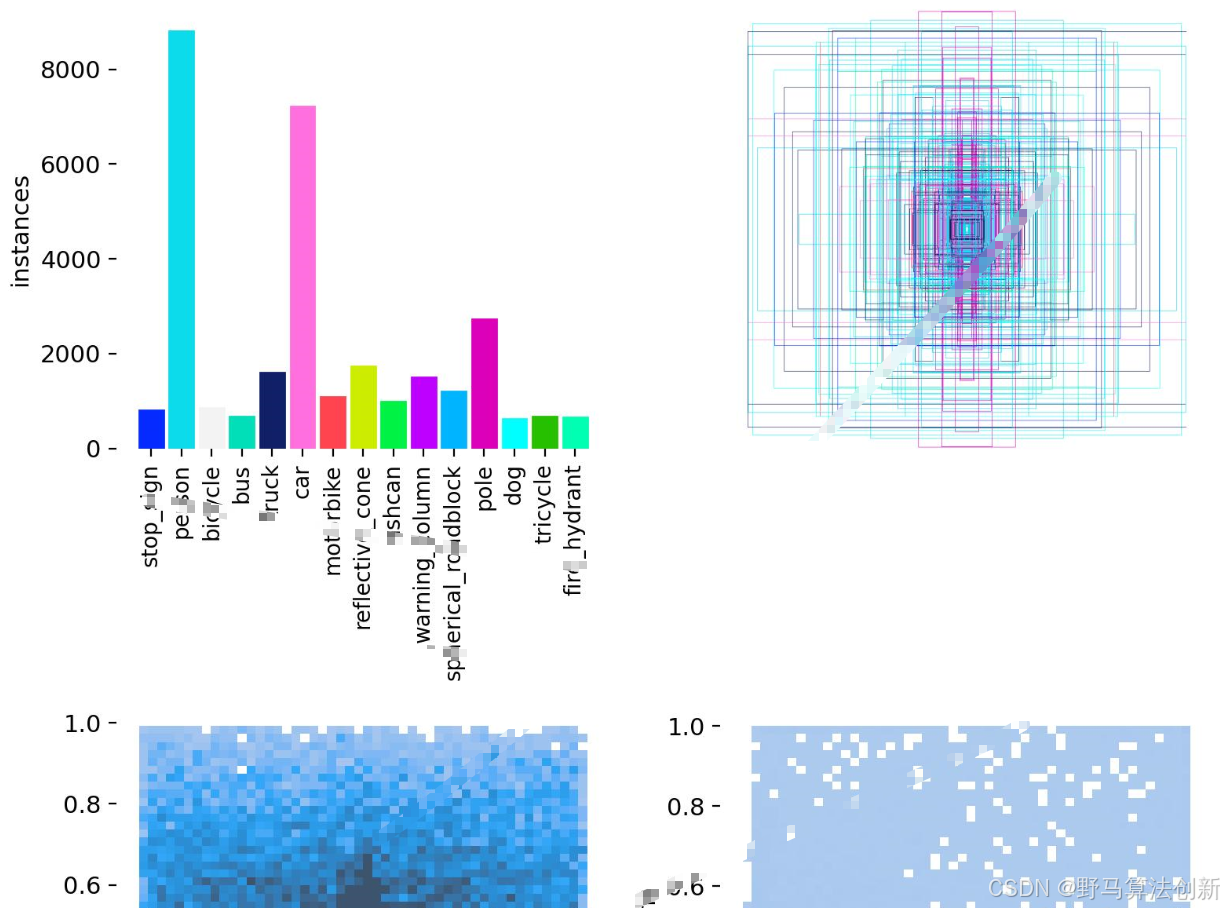
為了實現YOLOv11模型的高效訓練和優化,需要一個高質量、標注詳細的數據集。該數據集包含了各種盲人行走場景中的障礙物圖像,包括不同類型的障礙物(如人、車、路障等),以及不同環境條件下的圖像(如白天、夜晚、陰雨天等),確保模型在復雜環境下仍能保持高效的檢測能力。
數據集特點:
- 多樣化場景:數據集包含了城市街道、公園、小區等多種實際環境中的障礙物數據,涵蓋了盲人可能遇到的各種復雜場景。
- 詳細標注:每張圖像中的障礙物都經過精確標注,包括目標的類別、位置、尺寸等,確保訓練出的模型具有高精度的障礙物識別能力。
- 大規模數據:數據集包含數千張圖像,涵蓋了不同時間段、不同環境和不同季節的障礙物信息,確保模型具有較好的泛化能力。
 ?
?
應用場景:盲人輔助出行系統
基于YOLOv11的盲人障礙物檢測技術,能夠廣泛應用于各種盲人輔助出行系統,提升盲人出行的安全性和便捷性。以下是一些典型應用場景:
- 智能手杖:通過將YOLOv11集成到智能手杖中,實時檢測前方障礙物,并通過振動或聲音提示,幫助盲人避開障礙物,安全行走。
- 盲人穿戴設備:將YOLOv11應用于穿戴設備(如智能眼鏡或耳機),通過語音提示或震動反饋,實時告知盲人周圍的障礙物類型和位置。
- 智能導航系統:在智能手機或其他智能設備上,集成YOLOv11算法,為盲人提供實時的路徑規劃和障礙物檢測,幫助他們高效、安全地完成出行任務。
?
















:自注意力機制)


