針對工業高端裝備中主動磁懸浮軸承(AMB)的位移傳感器故障檢測需求,基于?LabVIEW?平臺構建了一套高精度故障識別系統。通過集成品牌硬件與?LabVIEW?的信號處理能力,實現了傳感器探頭故障的實時監測與精準定位,解決了傳統檢測方法在復雜工業環境下的局限性,為磁懸浮軸承系統的可靠性保障提供了工程化解決方案。
?
應用場景
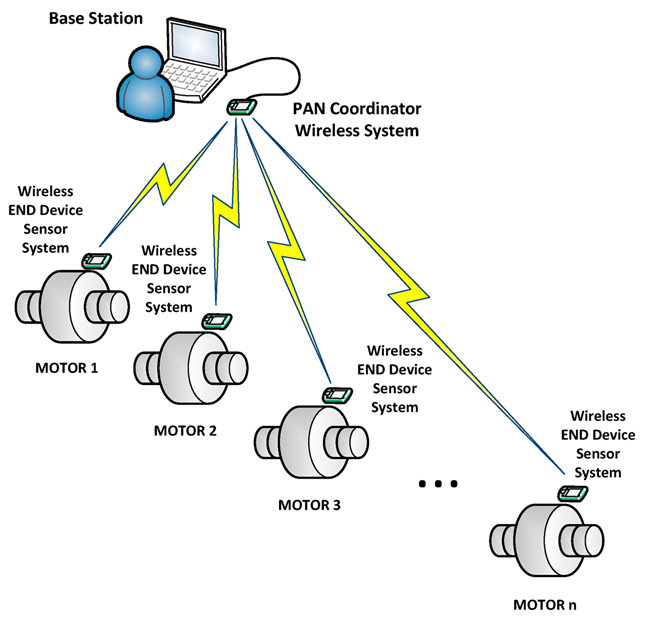
場景描述:主動磁懸浮軸承廣泛應用于高速電機、航空航天設備、精密加工機床等領域,其位移傳感器(如電渦流傳感器)的可靠性直接影響系統穩定性。實際運行中,傳感器探頭易因振動、高溫、電磁干擾等因素出現松動、線圈老化或短路等故障,導致轉子位移監測失效,甚至引發設備停機或安全事故。核心需求
-
實時檢測傳感器探頭的部分故障(如松動)與整體故障(如短路);
-
精準定位故障傳感器位置(雙探頭差動結構);
-
適應工業現場強干擾環境,保證檢測算法的魯棒性。
硬件選型
| 硬件模塊 | 品牌?/?型號 | 選型依據 |
| 位移傳感器 | 基恩士(KEYENCE)IL?-?030 | 高精度(分辨率?0.1μm)、抗干擾能力強,支持差動輸出,適配磁懸浮軸承微小位移測量需求。 |
| 數據采集卡 | 國家儀器(NI)USB?-?6356 | 16?位精度、多通道同步采集(支持?2?路電壓輸入),USB?接口即插即用,適合工業現場快速部署。 |
| 信號調理模塊 | 研華(Advantech)ADAM?-?3014 | 對傳感器輸出的微弱電壓信號(0?-?5V)進行濾波、放大,抑制環境噪聲(如?50Hz?工頻干擾)。 |
| 工控機 | 研華(Advantech)UNO?-?2483 | 寬溫設計(-20℃?~?60℃)、抗振動,內置?Windows??系統,支持?LabVIEW?實時模塊部署。 |
選型優勢:
-
大品牌可靠性:基恩士、NI、研華等硬件在工業領域驗證成熟,故障率低,支持長期穩定運行;
-
兼容性與擴展性:NI?數據采集卡與?LabVIEW?無縫集成,可快速調用驅動函數;研華模塊支持多種工業總線(如?RS?-?485),便于系統后期擴展。
軟件架構
?
?核心功能實現
-
數據采集模塊:通過?LabVIEW?的?NI?-?DAQmx?驅動函數,配置?USB?-?6356?采集卡以?10kHz?采樣率同步采集兩路傳感器輸出電壓(\(V_1,?V_2\))和控制器輸出電壓(\(U_C\)),確保信號時序一致性。
-
信號預處理模塊:
-
數字濾波:采用?LabVIEW?內置的?IIR?低通濾波器(截止頻率?1kHz),濾除高頻噪聲;
-
差分計算:計算傳感器差分電壓?\(V_d?=?V_1?-?V_2\),突出故障特征(正常時\(V_d?\approx?0\),故障時\(|V_d|\)顯著增大)。
-
-
故障特征提取模塊:
-
離散傅里葉變換(DFT):對\(V_d\)和\(U_C\)進行頻譜分析,提取故障信號頻率分量(如探頭松動引發的特定頻率干擾);
-
相位差計算:利用?LabVIEW?的相位測量函數,計算\(V_d\)與\(U_C\)在故障頻率下的相位差(傳感器?1?故障時相位差?180°,傳感器?2?故障時?0°)。
-
-
故障識別決策模塊:
-
閾值判斷:設定差分電壓閾值\(V_{tol}\)(如?0.1V),當\(|V_d|?>?V_{tol}\)時觸發故障檢測流程;
-
相位差定位:根據相位差特征(0°?或?180°),結合頻譜峰值頻率,判定故障傳感器位置。
-
-
報警與日志模塊:通過?LabVIEW?界面實時顯示故障類型與位置,觸發聲光報警,并將故障數據(時間、信號波形、頻譜)存入?CSV?日志文件,便于后期追溯分析。
軟件優勢與對比
| 優勢維度 | 本方案(LabVIEW?架構) | 傳統方案(如?C+++Matlab) |
| 開發效率 | 圖形化編程(G?語言),無需復雜語法,調試周期縮短?50%?以上。 | 需編寫大量代碼,依賴第三方庫,調試難度高。 |
| 實時性 | 支持實時模塊(LabVIEW?Real?-?Time),任務調度精度達?ms?級。 | 需手動優化線程調度,實時性依賴開發者經驗。 |
| 界面與集成 | 內置交互式?UI?設計工具,快速實現波形顯示、參數調節等功能。 | 需額外開發?GUI?或調用外部庫,集成成本高。 |
| 信號處理能力 | 內置?DFT、濾波、相位分析等函數,支持自定義算法擴展。 | 需手動實現算法或調用?Matlab?引擎,兼容性差。 |
| 工業適配性 | 支持?NI、研華等工業級硬件即插即用,提供?OPC?UA?等接口協議。 | 需自行開發硬件驅動,協議適配復雜。 |
核心特點:
-
低代碼高效開發:工程師可通過拖放函數節點快速搭建系統,降低對編程能力的依賴;
-
多域協同優勢:同一平臺實現數據采集、算法處理、界面展示與工業通信(如?Modbus),避免跨平臺數據交互延遲。
關鍵問題與解決方案
-
問題?1:工業環境噪聲干擾導致信號失真
-
現象:傳感器輸出包含?50Hz?工頻噪聲、電機電磁干擾,導致差分信號\(V_d\)出現誤觸發。
-
解決方案:
-
-
-
-
硬件層:采用雙絞屏蔽電纜傳輸信號,信號調理模塊增加硬件濾波(RC?低通濾波器);
-
軟件層:在?LabVIEW?中設計?IIR?陷波濾波器,針對性濾除?50Hz?噪聲,提升信噪比(SNR)至?20dB?以上。
-
-
-
問題?2:傳感器參數不一致導致誤判
-
現象:實際雙探頭傳感器增益\(K_{s1}\)與\(K_{s2}\)存在?±5%?偏差,導致正常狀態下\(V_d?\neq?0\),閾值設定困難。
-
解決方案:
-
預校準:在系統初始化階段,通過?LabVIEW?采集無故障狀態下的\(V_1\)和\(V_2\),計算平均偏差\(\mu?=?\frac{V_1?-?V_2}{2}\),建立基準值;
-
動態補償:實時監測\(V_d\)的均值,扣除基準偏差\(\mu\),使有效故障信號\(V_d'?=?V_d?-?\mu\),避免誤報警。
-
-
-
問題?3:部分故障(如探頭松動)特征不明顯
-
現象:探頭輕微松動僅引起信號中低頻噪聲增加,未超出正常電壓范圍,傳統閾值法無法檢測。
-
解決方案:
-
采用?DFT?分析噪聲頻率特征,提取松動故障對應的特征頻率(如機械振動頻率?100Hz);
-
對比\(V_d\)與\(U_C\)在特征頻率下的相位差,若相位差穩定為?180°?或?0°,則判定對應探頭松動。
-
-
通過?LabVIEW?的圖形化編程、內置信號處理工具鏈與工業硬件兼容性,成功實現了主動磁懸浮軸承位移傳感器的故障檢測與定位。方案已在某航空發動機測試臺磁懸浮軸承系統中應用,實測故障檢測準確率達?98%,平均定位時間?<?200ms,為高端裝備的預測性維護提供了可靠技術支撐。



)








)

 第10章擬合回歸模型10.9節思考題10.1 R語言解題)




