DP讀書:新能源科學與工程——專業課「新能源發電系統」
- 2025a 版本 MATLAB
- 下面進入正題
- 仿真一:Buck 電路
- 一、仿真目的
- 二、仿真內容
- (一)Buck電路基本構成及工作原理
- (二)Buck電路仿真模型及元件連接
- (三)Buck電路關鍵模塊參數設置
- (四)運行仿真與結果分析
- (五)故障診斷與排除
- 仿真二:逆變電路與 SPWM 控制技術仿真
- 一、仿真目的
- 二、仿真內容
- (一)單相逆變電路仿真
- (二)三相逆變電路仿真
- 仿真三:PI 控制在 DC/DC 變換電路及 DC/AC 變換電路中的應用
- 一、仿真目的
- 二、仿真內容
- (一)PI 控制在 DC/DC 變換電路中應用
- (二)PI 控制在單相 DC/AC 變換電路中應用
- 仿真四:光伏發電系統中最大功率點跟蹤技術仿真
- 一、仿真目的
- 二、仿真內容
- (一)擾動觀察法最大功率點跟蹤技術
- (二)電導增量法最大功率點跟蹤技術
很久沒有發博客了,停更也快接近大半年,時間更多花在了PPT和項目上,最近找了不少朋友一起做 開源人形機器人,于是 索性在課程作業和項目之余更新下我的課程筆記—— MATLAB從0基礎到 新能源發電系統仿真,感謝陳磊教授,下面的筆記在他的課上我逐漸學會如何使用MATLAB和Simulink。
P.S.:new_energy_coder_club也在今天迎來了第40位貢獻者
Gitee排名—前沿技術-機器人 No.24 (歡迎各位大佬給個Star🌟)
2025a 版本 MATLAB
在這之前看過各種MATLAB的書本只是覺得,《***快速教學》《***3小時看完》…用處不大,十多行語法對不起近百的價格(甚至還不如阿坤的MATLAB配色教程),在踩了一大堆坑之后,我終于意識到 一個好的課或者教程需要什么…
下面進入正題
三篇關于新能源電力轉換與控制仿真的實驗指導文檔
仿真一:Buck 電路
一、仿真目的
- 深入理解Buck電路的工作原理
- 掌握Buck電路的建模與仿真方法
- 學會分析Buck電路的性能特性
二、仿真內容
(一)Buck電路基本構成及工作原理
- 基本構成:Buck電路由直流電壓源、MOSFET管、二極管、電感電容濾波電路等組成。其中,MOSFET管和二極管構成開關電路,控制電能的傳輸;電感電容濾波電路用于平滑輸出電壓和電流。
- 工作原理:Buck電路是一種降壓型直流-直流變換器。當MOSFET管導通時,輸入電壓通過電感為負載和電容供電;當MOSFET管截止時,電感儲存的能量通過二極管釋放給負載和電容。通過調節MOSFET管的占空比,可以控制輸出電壓的大小。
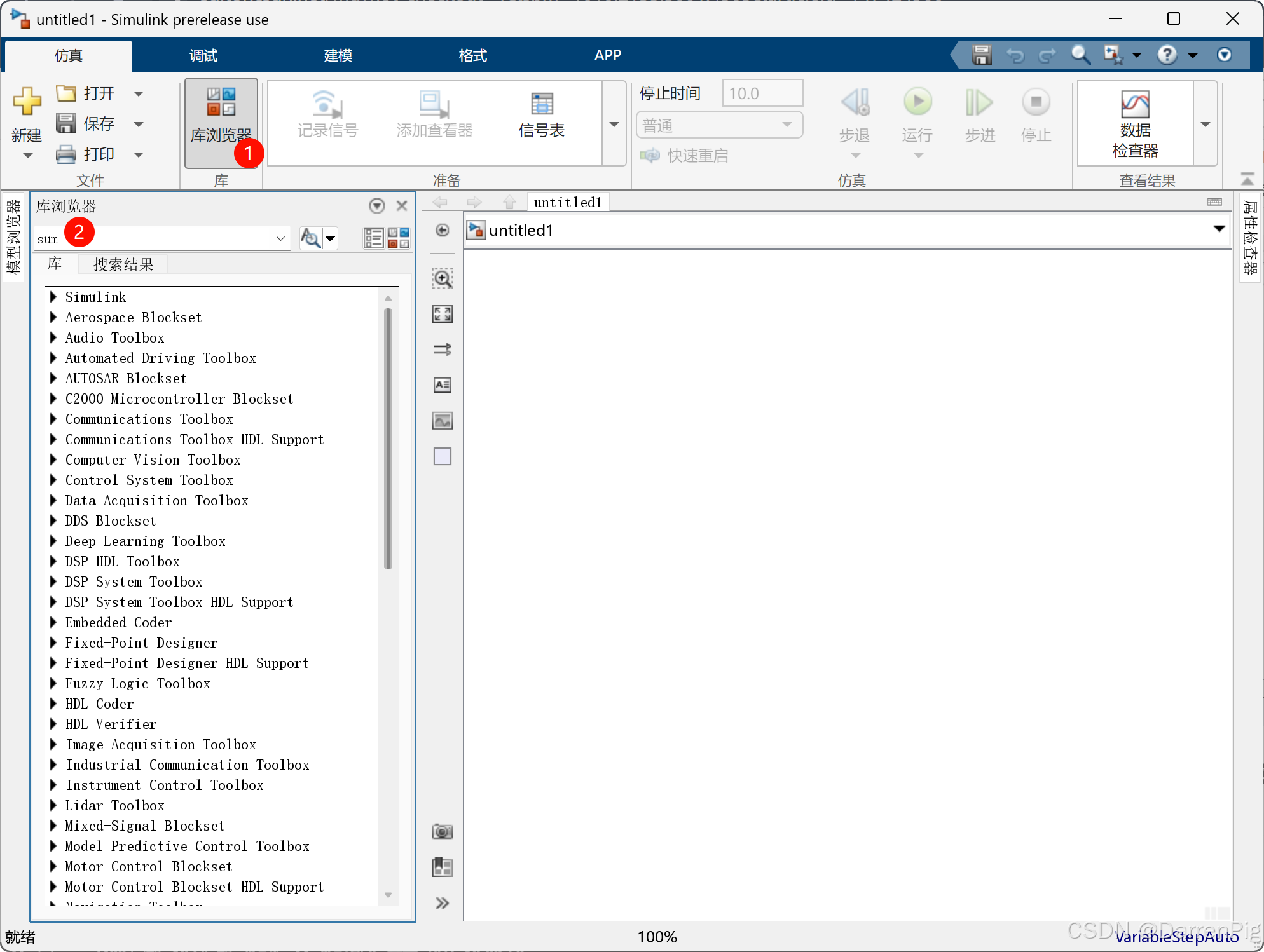
然后打開MATLAB2025,建議淘寶買個密鑰或者賬號,可玩性高
第一次打開會慢一點,左下角顯示如下:
上面的是模型的打開,選中空白模型
模型界面(首次打開)會等待幾分鐘
打開庫管理器就可以找到下面的模型,用到的如下,可以挨個復制


Mosfet
Universal bridge
DC voltage
RLC Branch
Pulse Generator
Mux
Powergui
vollage measurement
scope
然后把這些都拖動到
(二)Buck電路仿真模型及元件連接
- 建立仿真模型:使用Matlab/Simulink等仿真軟件,搭建Buck電路的仿真模型。包括直流電壓源、MOSFET管、二極管、電感電容濾波電路、負載電阻等元件的添加和連接。
- 元件連接:
- 直流電壓源連接到MOSFET管的漏極
- MOSFET管的源極連接到電感的一端
- 電感的另一端連接到負載電阻的一端和電容的一端
- 電容的另一端連接到負載電阻的另一端和地
- 二極管的陽極連接到MOSFET管的源極,陰極連接到電感的另一端
(三)Buck電路關鍵模塊參數設置
- 直流電壓源(DC Voltage Source):
- 模塊參數設置:在“Block Parameters (DC Voltage Source)”對話框中,設置“Sample based”為“off”,“Sample time (-1 for inherited)”為“-1”,“Input signal (v)”為“0”,“Output voltage (V)”為“100”,“Source impedance (ohms)”為“0”,“Output current (A)”為“0”,“Sample time (-1 for inherited)”為“-1”,“Input signal (v)”為“0”,“Output voltage (V)”為“100”,“Source impedance (ohms)”為“0”,“Output current (A)”為“0”,“Sample time (-1 for inherited)”為“-1”
- MOSFET管(MOSFET):
- 模塊參數設置:在“Block Parameters (MOSFET)”對話框中,設置“Type”為“N-channel enhancement mode”,“Rs (ohms)”為“0.1”,“Cs (F)”為“1e-12”,“Rs (ohms)”為“0.1”,“Cs (F)”為“1e-12”
- 電感(Inductor)和電容(Capacitor):
- 電感:在“Block Parameters (Inductor)”對話框中,設置“Inductance (H)”為“1e-3”,“Series resistance (ohms)”為“0.1”
- 電容:在“Block Parameters (Capacitor)”對話框中,設置“Capacitance (F)”為“1e-3”,“Series resistance (ohms)”為“0.01”
- 負載電阻(Resistor):
- 在“Block Parameters (Resistor)”對話框中,設置“Resistance (ohms)”為“1”
(四)運行仿真與結果分析
- 運行仿真:設置仿真參數,如仿真時間、步長等,運行仿真模型。
- 結果分析:
- 輸出電壓波形分析:觀察輸出電壓波形,檢查是否穩定在目標值附近。如果輸出電壓波動較大,可能需要調整電感、電容或占空比。
- 效率分析:計算Buck電路的效率,分析能量轉換效率。
- 紋波分析:測量輸出電壓的紋波大小,評估濾波效果。如果紋波過大,可以考慮增加電容值或調整占空比。
- 動態響應分析:改變輸入電壓或負載條件,觀察輸出電壓的動態響應,評估電路的穩定性和響應速度。
(五)故障診斷與排除
- 常見故障及原因分析:
- 輸出電壓過高或過低:可能是占空比設置不當或反饋控制環節出現問題。
- 輸出電壓紋波過大:可能是電感、電容值選擇不合適或開關頻率過低。
- 電路無法正常工作:可能是元件連接錯誤或參數設置不合理。
- 故障診斷與排除方法:
- 使用示波器等工具,檢查關鍵節點的波形,如輸入電壓、輸出電壓、MOSFET管的柵極驅動信號等。
- 根據波形特征,判斷故障類型和位置。
- 針對故障原因,調整參數或修復連接,重新運行仿真,驗證故障是否排除。
仿真二:逆變電路與 SPWM 控制技術仿真
一、仿真目的
- 學習單相及三相逆變變換電路的仿真方法
- 學習研究 SPWM 控制技術的作用
- 掌握逆變電路中濾波與信號頻譜分析方法
二、仿真內容
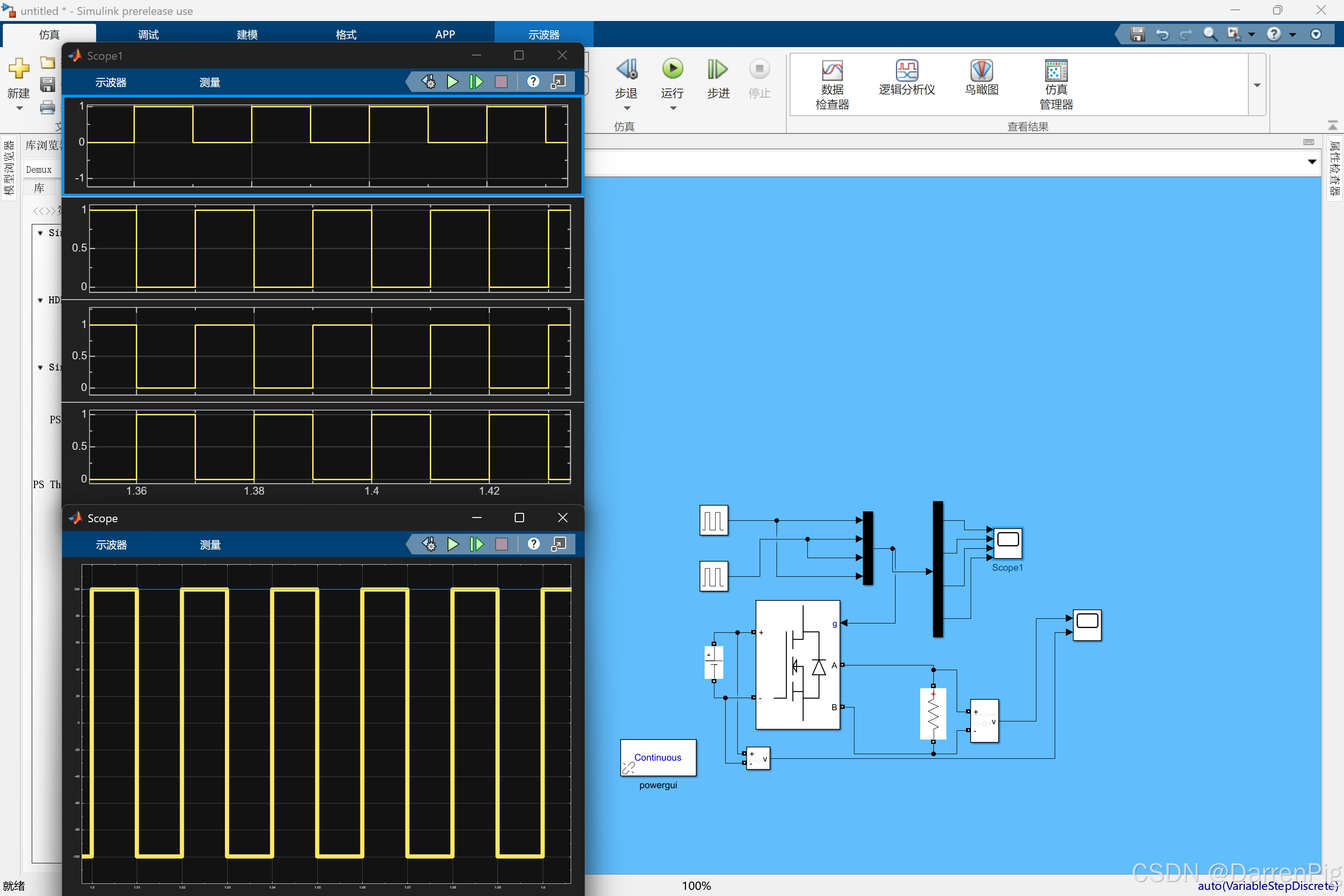
(一)單相逆變電路仿真
- 建立單相逆變電路的仿真模型,對比研究逆變電路的控制信號分別為簡單控制信號(即某個開關管的控制信號為 “半周期高電平半周期低電平” 的形式,可以不含有死區時間的設置)與 SPWM 信號時,逆變結果的差異。
- 對比觀察逆變控制信號的差異 :通過對比兩種控制信號,可以直觀地看到簡單控制信號和 SPWM 信號在波形上的不同。簡單控制信號是一種較為基礎的開關控制方式,而 SPWM 信號則具有更高的頻率和更復雜的調制特性,能夠更精確地控制逆變電路的輸出。
- 對比觀察逆變輸出信號的波形以及頻譜結構的差異 :信號頻譜分析步驟如下:
- 待分析信號從示波器中導出
- 選擇 “powergui\Tools\FFT Analysis”
- 分析相應信號的頻譜
簡單控制信號的逆變輸出信號頻譜較為復雜,諧波成分較多,而 SPWM 信號的逆變輸出信號頻譜則相對集中,諧波含量較低,這使得 SPWM 控制技術在逆變電路中具有更好的性能和更高的電能質量。
- 建立含有 LC 濾波電路的單相逆變電路的仿真模型,對比研究逆變電路的控制信號分別為簡單信號與 SPWM 信號時,最終逆變輸出結果的差異,以及濾波電路的截止頻率對最終逆變輸出的影響。
- 對比觀察最終逆變輸出信號的波形以及頻譜結構的差異 :添加 LC 濾波電路后,兩種控制信號下的逆變輸出波信號形和頻譜結構進一步得到改善。簡單控制信號的逆變輸出信號經過濾波后,諧波成分有所減少,但仍不如 SPWM 信號控制下的逆變輸出信號純凈。而 SPWM 信號控制下的逆變輸出信號在經過 LC 濾波后,能夠更接近理想的正弦波,頻譜特性更加優良。
- 研究 LC 濾波電路的參數(濾波截止頻率)對最終逆變輸出的影響 :通過改變 LC 濾波電路的參數,如電感 L 和電容 C 的值,可以調整濾波電路的截止頻率。一般來說,截止頻率的選擇需要根據逆變電路的輸出頻率和負載特性來確定。當截止頻率時較低,濾波效果較好,但可能會導致信號的相位移和幅值衰減;而截止頻率較高時,雖然濾波效果相對較弱,但能夠更好地保留信號的高頻特性。經過實驗發現,當 L、C 的參數均取為 1/(2pi50) 或其他合適參數時,能夠取得較好的濾波效果,使逆變輸出信號的質量得到顯著提高。
(二)三相逆變電路仿真
- 建立三相逆變電路仿真模型。
- 觀察三相逆變電路在簡單控制信號控制時的輸出相電壓、線電壓等信號的波形圖。在簡單控制信號下,三相逆變電路的輸出相電壓和線電壓呈現出方波的特性,波形較為粗糙,諧波含量較高。
- 對比觀察三相逆變電路的簡單控制信號與 SPWM 控制信號的波形圖。SPWM 控制信號的波形則要平滑得多,其調制特性使得輸出的相電壓和線電壓更接近正弦波,諧波成分得到了有效的抑制。
- 觀察三相逆變電路在 SPWM 信號控制時的輸出相電壓、線電壓等信號的波形圖,并與步驟 2 中的情況作對比。通過對比可以看出,SPWM 控制技術在三相逆變電路中具有明顯的優勢,能夠顯著提高電能質量,減少對電網的諧波污染。
- 給三相逆變電路添加 LC 濾波,觀察濾波后的有關輸出。添加 LC 濾波后,三相逆變電路的輸出信號得到了進一步的優化,波形更加平滑,諧波含量進一步降低,能夠更好地滿足負載對電能質量的要求。
仿真三:PI 控制在 DC/DC 變換電路及 DC/AC 變換電路中的應用
一、仿真目的
- 學習 PI 控制在 DC/DC 變換電路中的應用
- 學習 PI 控制在 DC/AC 變換電路中的應用
- 練習 PI 參數調節的相關方法
二、仿真內容
(一)PI 控制在 DC/DC 變換電路中應用
- 建立基于 PI 控制的 buck 電路仿真模型。
-
輸入電壓 Ui 設為 100V,電感 L 和電容 C 的量值可以均設為:1e-3,電阻取值為 1,PID 控制器的設置為:
- 在此模型中,PI 控制器的輸出量被用作 buck 電路中開關管的占空比控制信號。通過調節 PI 參數,可以實現對輸出電壓的精確控制。當 PI 控制器的輸出超過 1 時,可能會導致開關管一直處于導通或截止狀態,無法正常工作,因此需要將其限制在 0~1 之間,以確保電路的穩定運行。
-
調節 PI 參數,觀察電路的輸出電壓是否能夠很好地趨向并穩定在目標值:50V :PI 參數調節可以按照先調 P 參數(比例參數),再調 I 參數(積分參數)的方式進行。先調 P 參數時可以把 I 參數定為 0,P 參數調整得比較合適后,再添上 I 參數。通過反復試驗和調整 PI 參數,可以觀察到當 PI 參數設置合理時,電路的輸出電壓能夠快速地趨向并穩定在 50V 的目標值,實現對輸出電壓的精確控制。
-
(二)PI 控制在單相 DC/AC 變換電路中應用
- 建立基于 PI 控制的單相 DC/AC 變換電路仿真模型。
-
輸入電壓 Ui 設為 380V,電感 L 和電容 C 的量值可以均設為:1/(2pi50),電阻取值為 1,Sin 信號模塊的參數設置為:
- 在此模型中,PI 控制器的輸出量被用作逆變電路中開關管的調制信號,通過與正弦波信號的比較產生 PWM 控制信號,從而控制逆變電路的輸出電壓。由于正弦波信號的幅值范圍在 -1~1 之間,因此需要將 PI 控制器的輸出限制在 -1~1 之間,以確保 PWM 控制信號的正確性。
-
PID 控制器的設置為:
- 調節 PI 參數,觀察電路的輸出電壓是否能夠很好地趨向并穩定在目標值:220V/50Hz 的正弦交流電。PI 參數同樣可以按照先調 P 參數(比例參數),再調 I 參數(積分參數)的方式進行調節。通過合理設置 PI 參數,可以使逆變電路的輸出電壓波形接近理想的正弦波,頻率穩定在 50Hz,幅值穩定在 220V 左右。此時的 PI 控制器只需要稍微設置參數,即可獲得很好的控制效果,這說明在單相 DC/AC 變換電路中,PI 控制具有較高的控制精度和穩定性。
-
仿真四:光伏發電系統中最大功率點跟蹤技術仿真
一、仿真目的
- 學習研究擾動觀察法最大功率點跟蹤技術的仿真方法
- 學習研究電導增量法最大功率點跟蹤技術的仿真方法
- 掌握有關仿真電路的搭建方法與技巧
二、仿真內容
(一)擾動觀察法最大功率點跟蹤技術
-
建立由光伏陣列及 buck 電路構成的電路系統模型。其中最大功率點跟蹤子系統(subsystem,可以改名為 mppt)的電路結構如下:
- 其中 PWM 信號產生子系統(pwm)的電路結構(此部分可以用軟件自帶的模塊 “PWM Generator (DC-DC)” 代替,更方便):
- 部分模塊的參數設置:
- PV Array:
- Zero-Order Hold 與 Zero-Order Hold1:
- Merory 與 Merory1:
- Merory2:
- Saturation(限幅項):
-
運行仿真模型,觀察最大功率點跟蹤的過程,并進行以下探究。
- 探究 buck 電路控制信號的占空比調整步長 (ΔD) 對最大功率點跟蹤過程的影響 :占空比調整步長 ΔD 的大小會影響 MPPT 的速度和精度。較大的 ΔD 可以加快跟蹤速度,但可能會導致在最大功率點附近振蕩,影響跟蹤精度;較小的 ΔD 則能夠提高跟蹤精度,但跟蹤速度較慢。通過實驗可以觀察不同 ΔD 值下最大功率點跟蹤過程的變化,找出適合的 ΔD 值以達到較好的跟蹤效果。
- 探究電路信號的采樣時間 (Zero-Order Hold 的時間設置) 對最大功率點跟蹤過程的影響 :采樣時間的長短也會影響 MPPT 的性能。較短的采樣時間能夠更及時地反映光伏陣列的輸出變化,加快跟蹤速度;但過短的采樣時間可能會引入更多的噪聲和干擾,影響跟蹤精度。較長的采樣時間則會使跟蹤速度變慢,無法及時響應光照強度和溫度等環境參數的變化。通過調整 Zero-Order Hold 的時間設置,可以觀察采樣時間對最大功率點跟蹤過程的影響,確定合適的采樣時間。
- Merory2 模塊的初始值可以設為 0 或 0.4 或其它值,對比仿真結果會有怎樣的不同,思考原因 :Merory2 模塊的初始值會影響 MPPT 的起始狀態和收斂過程。不同的初始值可能導致最大功率點跟蹤的初始方向和速度不同,進而影響整個跟蹤過程的收斂時間和穩定性。例如,當初始值設置為 0 時,可能需要較長的時間才能逐漸尋找到最大功率點;而當初始值設置為 0.4 時,可能會更快地接近最大功率點,但也可能會出現一定的振蕩。通過對比不同初始值下的仿真結果,可以更好地理解初始值對 MPPT 算法的影響。
- 思考負載電阻值的取值要求 :負載電阻值的大小與光伏陣列的最大功率輸出密切相關。為了使光伏陣列能夠在最大功率點運行,負載電阻值需要滿足一定的條件。一般來說,負載電阻值應該與光伏陣列在最大功率點的等效內阻相匹配,這樣才能夠實現最大功率傳輸。如果負載電阻值過大或過小,都會導致光伏陣列的輸出功率降低,無法達到最大功率點。
- 嘗試創造出光伏陣列所處的環境參數變化 (光照強度、溫度變化),觀察相應的最大功率點跟蹤過程 :通過改變光伏陣列的光照強度和溫度等環境參數,可以模擬實際應用中光伏系統的運行工況。觀察在環境參數變化時最大功率點跟蹤過程的變化,可以驗證 MPPT 算法的適應性和魯棒性。例如,當光照強度突然增加或減小時,MPPT 算法能夠及時調整控制策略,使光伏陣列迅速跟蹤到新的最大功率點,確保系統的穩定運行。
-
嘗試建立由光伏陣列與 boost 電路構成的電路系統模型,并在此模型中演示擾動觀察法最大功率點跟蹤過程。與 buck 電路相比,boost 電路具有不同的拓撲結構和工作原理,但 MPPT 的基本思想和方法是類似的。通過建立 boost 電路模型并進行仿真,可以進一步加深對擾動觀察法最大功率點跟蹤技術的理解和掌握,同時了解不同拓撲結構電路在光伏發電系統中的應用特點。
(二)電導增量法最大功率點跟蹤技術
- 建立由光伏陣列及 buck 電路構成的電路系統模型。其中最大功率點跟蹤子系統 (mppt) 的電路結構如下:
- 運行仿真模型,觀察最大功率點跟蹤的過程。
- 對比擾動觀察法與電導增量法,找出兩者的差異。擾動觀察法是通過周期性地擾動光伏陣列的工作點,觀察功率的變化趨勢來判斷是否接近最大功率點;而電導增量法則是基于光伏陣列的伏安特性,通過測量光伏陣列的電壓和電流變化率來確定最大功率點的方向。電導增量法具有跟蹤精度高、響應速度快等優點,但其算法相對復雜,對電路參數的精度要求較高。
- 探究電導增量法最大功率點跟蹤過程中的影響因素。例如,光伏陣列的參數變化、電路元件的精度、環境因素等都可能對電導增量法的跟蹤效果產生影響。通過分析這些影響因素,可以采取相應的措施來提高電導增量法的最大功率點跟蹤性能,確保光伏發電系統在各種工況下都能穩定、高效地運行。
2025.04.23 源自于 陳磊教授的新能源電力轉換與控制仿真課
)


)



之中醫知識問答自動生成對話標題bug修改)



![[密碼學基礎]GMT 0029-2014簽名驗簽服務器技術規范深度解析](http://pic.xiahunao.cn/[密碼學基礎]GMT 0029-2014簽名驗簽服務器技術規范深度解析)

:分隔條 QSplitter 允許程序的用戶修改布局,程序員使用 IDE時,就是分隔條的用戶,以及其 QSplitter 源代碼)



)

