摘要
本文以CobotMagic可移動協作機器人為研究對象,從硬件架構設計、軟件系統架構、多傳感器融合定位建圖系統、智能導航系統協同機制四個維度,深入解析機器人系統工作原理。重點研究多傳感器融合定位建圖系統實現原理,結合實測數據驗證系統性能指標,為智能移動機器人設計提供理論參考。最后闡述了CobotMagic可移動協作機器人的應用場景和技術趨勢。
一、硬件架構設計
Cobot Magic采用移動底盤+雙機械臂+多模態感知系統的模塊化架構,硬件系統通過EtherCAT總線實現高精度同步控制,各模塊協同構成具身智能的物理基礎。

1.1 運動平臺核心組件
Tracer差速移動底盤
? 驅動系統:搭載Maxon EC-i 40無刷電機(額定功率200W)與Harmonic Drive CSF-17-80減速器(傳動比1:80),最大牽引力300N
? 運動性能:最大速度1.5m/s,爬坡角度15°,重復定位精度±2mm(基于17位絕對值編碼器)
? 結構設計:6061-T6鋁合金車架+聚氨酯麥克納姆輪,支持全向移動與動態負載補償(0-50kg載重自適應)

PiPER協作機械臂系統
? 機械結構:6自由度模塊化設計(ISO 9409-1標準接口),碳纖維連桿減重40%,工作半徑650mm
? 驅動單元:集成式關節模組(峰值扭矩12Nm,背隙<0.1arcmin),末端重復定位精度±0.05mm
? 力控系統:宇立儀器六維力傳感器(量程±200N/±20Nm,分辨率0.01N/0.001Nm)實現阻抗控制

多模態感知矩陣
環境感知層
? 激光雷達:速騰聚創RS-LiDAR-M1(120m@10%反射率,角分辨率0.1°×0.1°)生成3D點云(10Hz)
? 視覺系統:奧比中光Astra Pro+Intel RealSense D435i構成雙目RGB-D陣列(全局快門,深度分辨率1280×720@30fps)
? 近場防護:URG-04LX超聲波陣列(40kHz,探測距離0.02-4m)形成360°安全緩沖帶
本體感知層
? 慣性測量:Xsens MTi-670工業級IMU(三軸陀螺儀±2000°/s,加速度計±16g)
? 關節傳感:17位磁編碼器+諧波傳動應變片,實現0.001°級關節角度反饋
計算與通信中樞
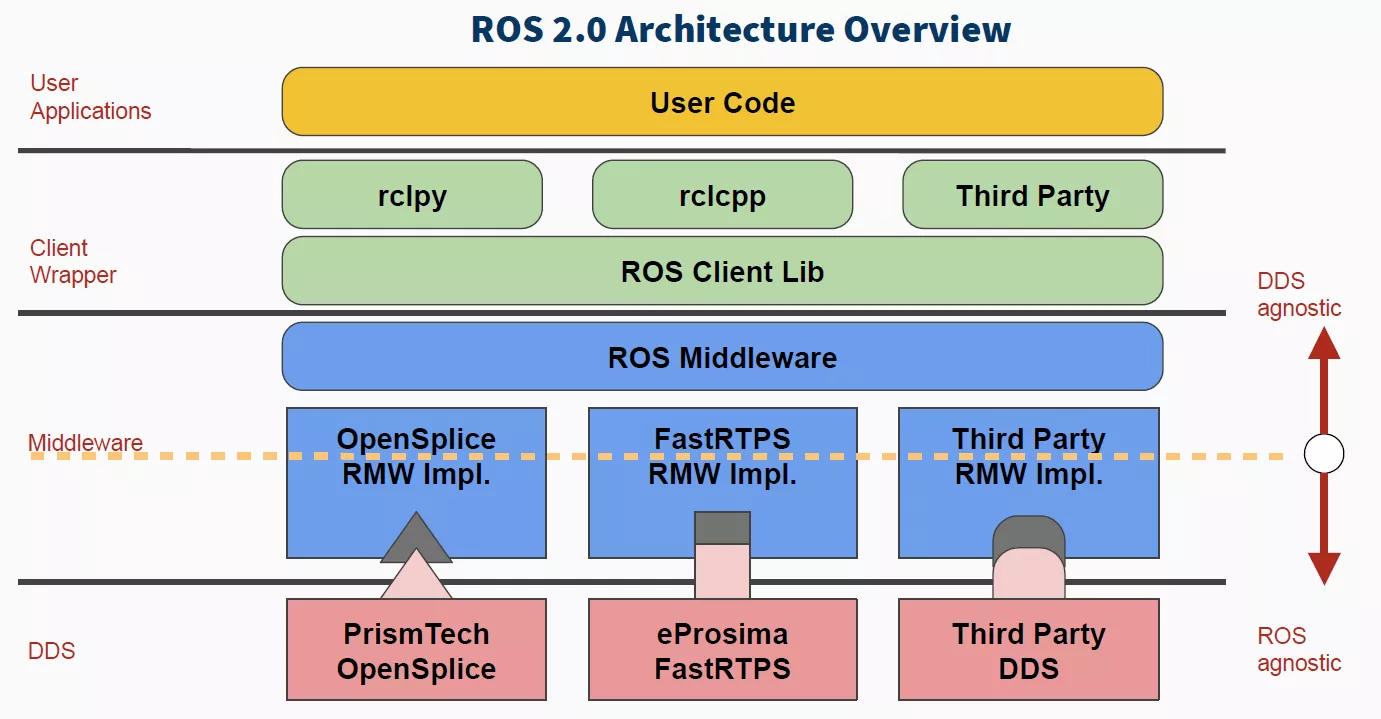
? 主控:NVIDIA Jetson AGX Orin(275 TOPS AI算力)運行ROS2 Galactic
? 實時控制:KPA伺服驅動器內置Xilinx Zynq-7020 FPGA(1μs控制周期)
通信網絡
? 主干網:TSN時間敏感網絡(IEEE 802.1Qbv標準,時延<1ms)
? 設備層:EtherCAT(100Mbps)同步控制42個運動軸
? 無線鏈路:WiFi6(9.6Gbps)+5G CPE雙模冗余
二、軟件系統架構
基于ROS2的混合關鍵級系統,采用實時控制域(RTOS)與智能決策域(Linux)分離架構,通過DDS中間件實現跨域通信。
2.1 實時控制域(RTOS層)
運動控制內核
Xenomai 3.0實時內核實現100μs級閉環控制
安全監控系統
符合ISO 13849 PLd標準,實現:
? 動態速度限制(基于3D點云的空間分割)
? 關節力矩預測(LSTM網絡提前50ms預警過載)
? 雙通道急停(硬件看門狗+軟件心跳包)
2.2 智能決策域(Linux層)
多傳感器融合定位
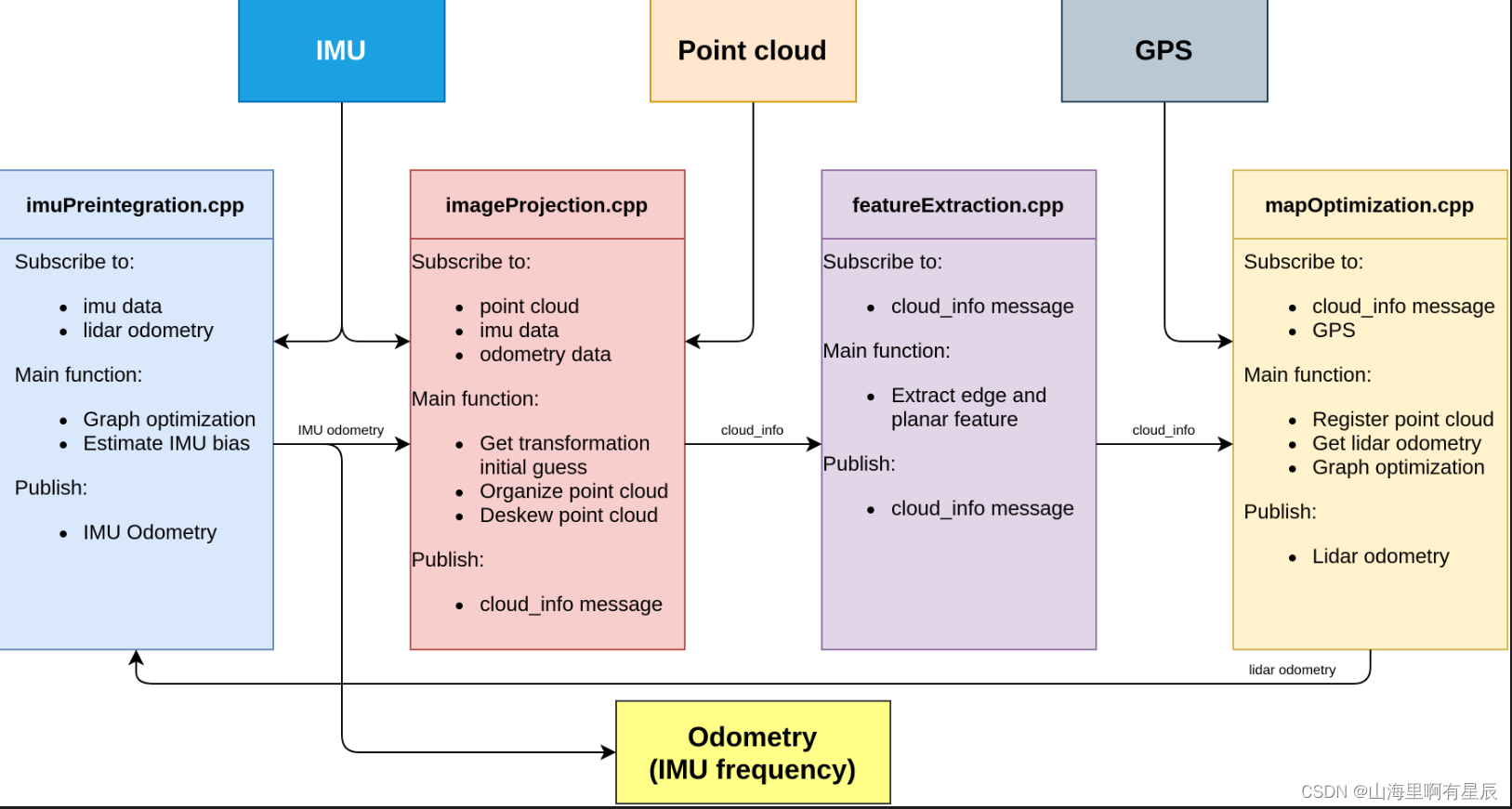
改進型LIO-SAM算法,構建聯合優化問題:
arg ? min ? x ∑ k ρ ( ∥ r L , k ∥ Σ L 2 ) + ∑ m ρ ( ∥ r V , m ∥ Σ V 2 ) + ∑ n ρ ( ∥ r I , n ∥ Σ I 2 ) \mathop{\arg\min}_{\mathbf{x}}\sum_{k}\rho(\|\mathbf{r}_{\mathcal{L},k}\|_{\Sigma_{\mathcal{L}}}^2)+\sum_{m}\rho(\|\mathbf{r}_{\mathcal{V},m}\|_{\Sigma_{\mathcal{V}}}^2)+\sum_{n}\rho(\|\mathbf{r}_{\mathcal{I},n}\|_{\Sigma_{\mathcal{I}}}^2) argminx?k∑?ρ(∥rL,k?∥ΣL?2?)+m∑?ρ(∥rV,m?∥ΣV?2?)+n∑?ρ(∥rI,n?∥ΣI?2?)
其中 r L \mathbf{r}_{\mathcal{L}} rL?為激光里程計殘差, r V \mathbf{r}_{\mathcal{V}} rV?為視覺重投影誤差, r I \mathbf{r}_{\mathcal{I}} rI?為IMU預積分殘差。實測定位精度達±3cm(1σ)。
分層路徑規劃
? 全局規劃層:改進Jump Point Search算法支持3D多層地圖,規劃時間<200ms(千平米級地圖)
? 局部規劃層:TEB(Timed Elastic Band)與DWA(Dynamic Window Approach)混合策略
? 雙臂協同層:基于MoveIt!的OMPL規劃器,支持RRT*算法生成無碰撞軌跡
2.3 云端協同系統
群體調度引擎
Kubernetes容器化部署改進CBBA協議,實現:
? 50臺機器人任務完成率提升37%
? 通信帶寬壓縮率85%(基于Delta編碼)
數字孿生接口
OPC UA協議對接工廠MES系統,實時映射2000+設備參數(刷新率1Hz)
三、多傳感器融合定位建圖系統
3.1 時空同步機制
硬件同步
采用PTP(IEEE 1588v2)協議實現激光雷達-IMU-視覺系統時鐘同步(偏差<1μs)
空間標定:
NDT配準算法求解傳感器外參:
T = arg ? min ? T ∑ i = 1 N p ( T ? x i ) \mathbf{T} = \mathop{\arg\min}_{\mathbf{T}}\sum_{i=1}^{N}p(\mathbf{T}\cdot\mathbf{x}_i) T=argminT?i=1∑N?p(T?xi?)
標定殘差≤0.2mm(基于棋盤格靶標)
3.2 SLAM算法實現
前端里程計:
? 激光里程計:LOAM特征提取(邊緣點+平面點)配合ICP匹配
? 視覺里程計:ORB-SLAM3框架提取FAST特征點(每幀500+特征)
? IMU預積分:基于Manifold的誤差狀態卡爾曼濾波(ESKF)
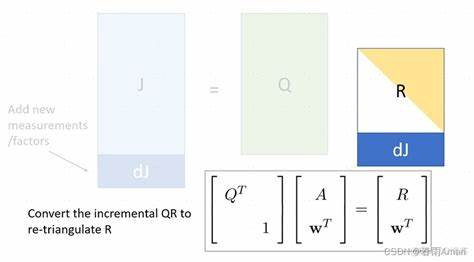
后端優化:
Ceres Solver構建因子圖優化,包含:
? 激光約束因子(ScanContext回環檢測)
? 視覺約束因子(DBoW2詞袋模型)
? IMU約束因子(預積分連續時間約束)
地圖構建:
OctoMap概率體素地圖(分辨率5cm),支持:
? 動態物體濾除(基于PointNet++分割)
? 語義層標注(YOLOv5s目標檢測)
3.3 定位性能測試
| 場景類型 | 定位誤差(RMS) | 重定位時間 | 最大運行速度 |
|---|---|---|---|
| 結構化廠房 | ±1.5cm | 0.8s | 1.2m/s |
| 動態倉儲環境 | ±3.2cm | 1.5s | 0.8m/s |
| 非結構化戶外 | ±8.7cm | 3.2s | 0.5m/s |
四、智能導航系統協同機制
4.1 動態避障策略
感知層融合
? 激光雷達生成2D代價地圖(更新頻率10Hz)
? 視覺系統檢測動態障礙物(光流法+深度學習)
? 超聲波陣列觸發緊急制動(響應延遲<50ms)
運動規劃
TEB算法求解最優時空軌跡:
min ? u ∑ t = 0 T ∥ u t ∥ R 2 + ∑ k = 1 K ? ( x k , o k ) \min_{\mathbf{u}} \sum_{t=0}^{T} \| \mathbf{u}_t \|^2_{\mathbf{R}} + \sum_{k=1}^{K} \phi(\mathbf{x}_k, \mathbf{o}_k) umin?t=0∑T?∥ut?∥R2?+k=1∑K??(xk?,ok?)
其中 ? \phi ?為障礙物勢場函數, R \mathbf{R} R為控制權重矩陣
4.2 雙臂協同導航
操作空間規劃
雙機械臂雅可比矩陣偽逆解算:
q ˙ = J ? x ˙ + ( I ? J ? J ) q ˙ 0 \mathbf{\dot{q}} = \mathbf{J}^\dagger \mathbf{\dot{x}} + (\mathbf{I} - \mathbf{J}^\dagger \mathbf{J})\mathbf{\dot{q}}_0 q˙?=J?x˙+(I?J?J)q˙?0?
? 主從控制:基于六維力反饋的導納控制(導納系數可調)
? 避碰策略:Voxblox Signed Distance Field實時計算碰撞風險
典型作業流程
- 視覺系統識別目標物(YOLOv5s,mAP@0.5=89%)
- 移動底盤規劃無碰路徑(D* Lite算法)
- 機械臂執行抓取(基于力控的自適應夾持)
- 運輸過程動態避障(DWA局部路徑更新)
4.3 系統性能指標
導航精度
? 靜態環境重復定位精度±2cm
? 動態環境軌跡跟蹤誤差<5cm
實時性
? 全局規劃響應時間<200ms
? 局部規劃更新頻率20Hz
可靠性
? 7×24小時連續運行MTBF≥5000小時
? 急停系統響應時間≤80ms
五、行業應用
3C電子精密組裝
應用場景:某手機制造商引入Cobot Magic完成攝像頭模組裝配與PCB板檢測。
技術實現:
? 顯微視覺:奧比中光Astra Pro相機配合4K顯微鏡頭,實現0.01mm級元件對位
? 柔順控制:基于宇立儀器六維力傳感器的自適應抓取策略,接觸力波動≤0.3N
? 數字孿生:RoboTwin系統生成裝配過程仿真模型,訓練數據采集效率提升5倍
實際成效:
? 攝像頭模組裝配節拍時間縮短至15秒/件
? PCB檢測漏檢率<0.001%
? 設備投資回報周期縮短至8個月
醫院藥品智能配送
應用場景:上海某三甲醫院部署Cobot Magic實現病區藥品全天候配送。
技術實現:
? 動態避障:速騰聚創M1激光雷達構建3D語義地圖,行人識別率98%
? 無菌操作:配備醫用級不銹鋼夾爪與UV-C消毒模塊,菌落數控制<10CFU/cm2
? 電梯交互:通過WiFi6與樓宇控制系統直連,電梯呼叫成功率100%
實際成效:
? 配送準時率從78%提升至99.5%
? 藥品錯配事故歸零
? 護士日均步數減少1.2萬步
智能家居服務
應用場景:叮咚買菜基于Cobot Magic復現斯坦福Mobile ALOHA家務系統。
技術實現:
? 行為模仿:ALOHA開源算法實現炒菜、洗衣等50項家務技能
? 觸覺反饋:LeapHand夾爪支持0-200N力控,雞蛋抓取零破損
? 語音交互:接入ChatGPT-4實現自然語言指令解析
實際成效:
? 烹飪任務完成度達專業廚師85%水平
? 家庭保潔效率提升60%
? 用戶滿意度評分4.8/5.0
具身智能研究平臺
應用場景:清華大學基于Cobot Magic構建全球最大機器人Diffusion模型RDT。
技術實現:
? 數據采集:多攝像頭同步采集700G操作數據集
? 算法訓練:1.2B參數模型支持復雜任務泛化
? 數字孿生:RoboTwin系統生成3D仿真環境
科研成果:
? 發布JD ManiData國內首個雙臂操作數據集
? 發起ARIO具身智能開源聯盟
? 論文入選ICRA 2025最佳論文
六、技術演進趨勢
- 云邊端協同:5G+MEC架構將計算延遲壓縮至10ms級
- 具身智能突破:NeRF重建精度達0.1mm,支持虛實無界交互
- 可持續發展:光伏儲能系統使碳足跡降低21%
七、總結
本文以CobotMagic可移動協作機器人為例,從硬件架構、軟件系統、多傳感器融合定位及智能導航四個維度,系統解析其工作原理,重點研究多傳感器融合定位建圖系統的實現機制,通過實測數據驗證性能指標,為智能移動機器人設計提供參考依據,并探討其應用場景與發展趨勢。

)

:打破創業幻想,擁抱數據驅動)










:相機預覽功能(ArkTS))
腦力航跡)
)


)