【案例說明】
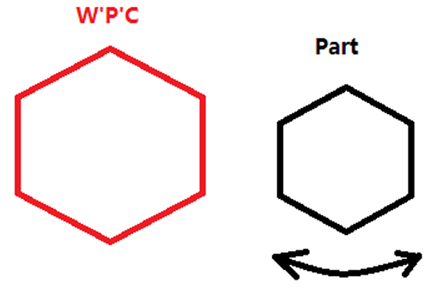
本案例產品在托盤中,角度變化不大(<15度);抓取沒有問題,只是放的穴位只能容許3度的角度偏差,因此需要測量產品的角度。
思路是:機器人抓料后、去固定拍照位拍照(找到與標準照片的角度偏差),機器人在放料的位置上多旋轉這個角度偏差,把產品放進去。
步驟過程如下:
1. 手動示教夾爪中心的工具坐標Tool1
因為本產品是正六面體,夾爪的中心就是產品的中心,所以用夾爪抓住一個針尖,然后幾個方向去對準一個針尖。得到夾爪中心的Tool1.
【案例說明】
本案例產品在托盤中,角度變化不大(<15度);抓取沒有問題,只是放的穴位只能容許3度的角度偏差,因此需要測量產品的角度。
思路是:機器人抓料后、去固定拍照位拍照(找到與標準照片的角度偏差),機器人在放料的位置上多旋轉這個角度偏差,把產品放進去。
步驟過程如下:
1. 手動示教夾爪中心的工具坐標Tool1
因為本產品是正六面體,夾爪的中心就是產品的中心,所以用夾爪抓住一個針尖,然后幾個方向去對準一個針尖。得到夾爪中心的Tool1.
本文來自互聯網用戶投稿,該文觀點僅代表作者本人,不代表本站立場。本站僅提供信息存儲空間服務,不擁有所有權,不承擔相關法律責任。 如若轉載,請注明出處:http://www.pswp.cn/bicheng/75202.shtml 繁體地址,請注明出處:http://hk.pswp.cn/bicheng/75202.shtml 英文地址,請注明出處:http://en.pswp.cn/bicheng/75202.shtml
如若內容造成侵權/違法違規/事實不符,請聯系多彩編程網進行投訴反饋email:809451989@qq.com,一經查實,立即刪除!


















