前言
在自動駕駛和機器人視覺這兩個飛速發展的領域中,3D目標檢測技術扮演著核心角色。隨著深度學習技術的突破性進展,3D目標檢測算法的研究和應用正日益深入。OpenPCDet,這個由香港中文大學OpenMMLab實驗室精心打造的開源工具箱,為3D目標檢測領域提供了一個功能強大且易于使用的平臺。本文將帶您走進OpenPCDet的世界,一探3D目標檢測的奧秘。
主流3D目標檢測框架概覽
目前,有幾個主流的3D目標檢測框架因其強大的功能和靈活性而受到研究者和開發者的青睞:
OpenPCDet
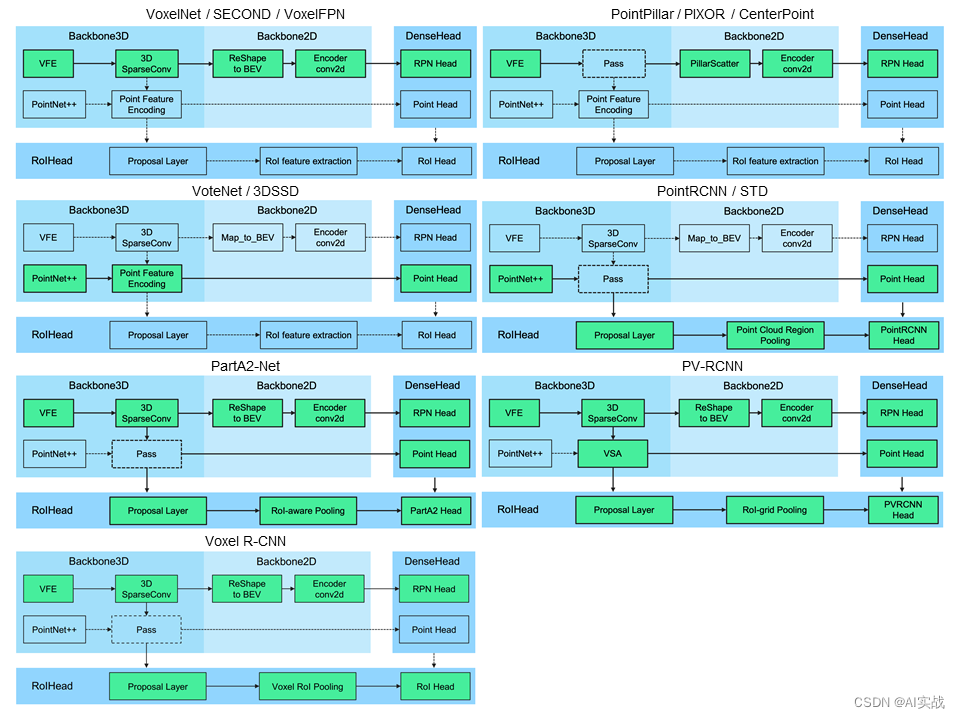
OpenPCDet是由香港中文大學OpenMMLab實驗室開發的一個開源工具箱,專注于基于激光雷達(LiDAR)的3D目標檢測。它支持多種算法,如PointRCNN、PV-RCNN等,并且可以處理多個標準3D檢測數據集,如KITTI、Waymo、nuScenes等。
特點:
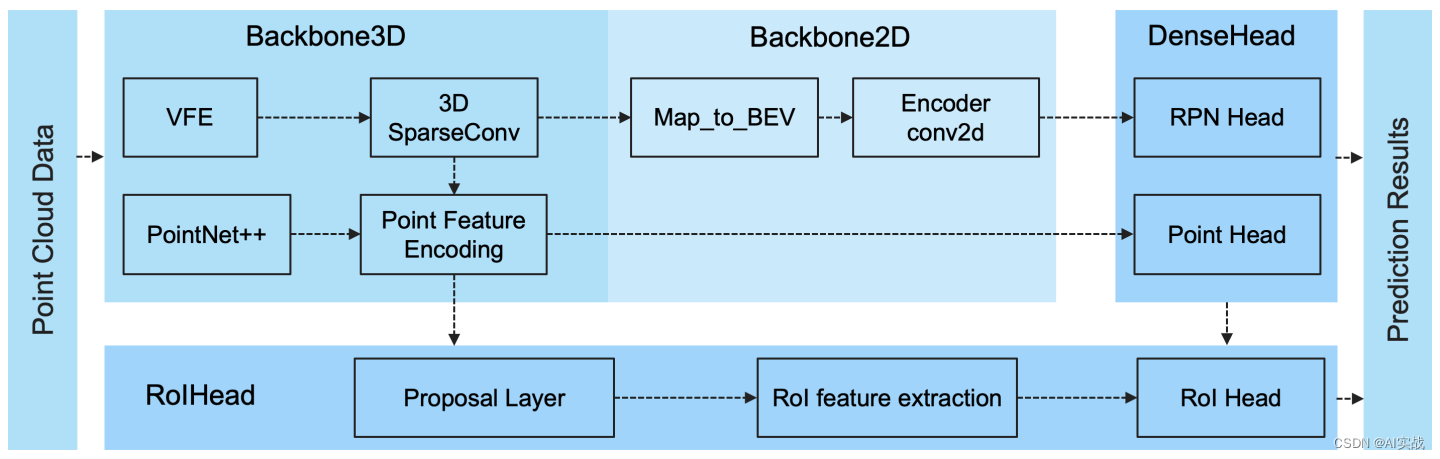
- 模塊化設計:代碼結構清晰,易于擴展和維護。
- 多算法支持:集成多種主流3D檢測算法,方便比較和選擇。
- 社區活躍:擁有活躍的開發社區和豐富的技術資源。
mmdetection3d
mmdetection3d是OpenMMLab旗下的另一個重要項目,它是一個基于PyTorch的開源3D目標檢測工具箱,支持多種3D檢測任務,包括單模態和多模態檢測。
特點:
- 豐富的模型庫:提供多種預訓練模型,覆蓋室內和室外場景。
- 多數據集兼容:支持SUN RGB-D, ScanNet, nuScenes, Lyft, KITTI等多個數據集。
- 靈活的配置:用戶可以根據自己的需求靈活配置模型和訓練參數。
Paddle3D
Paddle3D是由百度飛槳(PaddlePaddle)團隊開發的3D目標檢測框架,它提供了豐富的3D視覺能力,支持單目、點云等多種模態以及檢測、分割等多種任務類型。
特點:
- 基于PaddlePaddle:適合熟悉PaddlePaddle的用戶。
- 端到端支持:從模型訓練到部署提供全流程支持。
- 與Apollo集成:與百度Apollo開放平臺無縫銜接,便于自動駕駛領域的應用。
OpenPCDet不僅適用于研究者,也適合工業界的開發者使用。其簡潔獨立的開源平臺降低了進入3D視覺領域的難度.
mmdetection3d 相比于OpenPCDet,入門門檻較高,代碼閱讀相對困難。模型部署工具仍在試驗階段,可能不如OpenPCDet成熟。
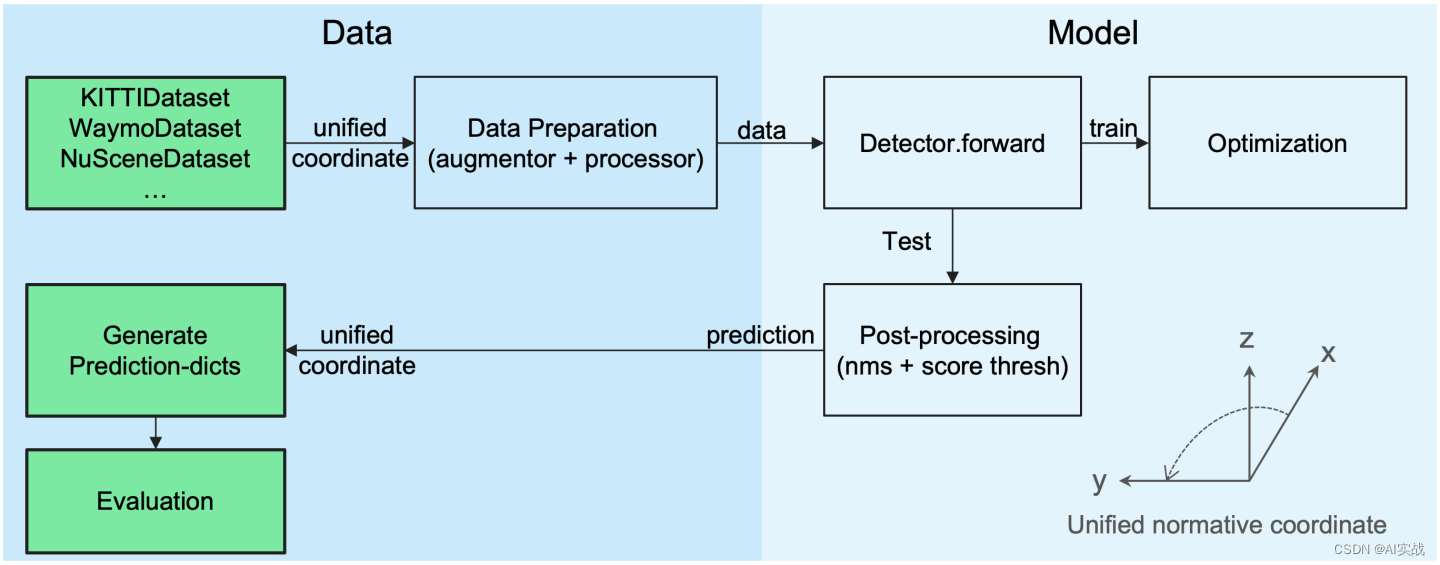
數據-模型分離
OpenPCDet采用了數據-模型分離的設計思想,這意味著數據處理和模型計算是分開的,從而使得研究者可以更靈活地處理不同數據集的3D坐標定義與轉換問題.
支持多樣數據集
OpenPCDet支持多種常用的點云數據集,如KITTI、NuScene、Lyft、Waymo和PandaSet等
。這些數據集在數據格式與3D坐標系上有所不同,OpenPCDet通過統一的規范化3D坐標表示來解決這一問題。
集成最新技術
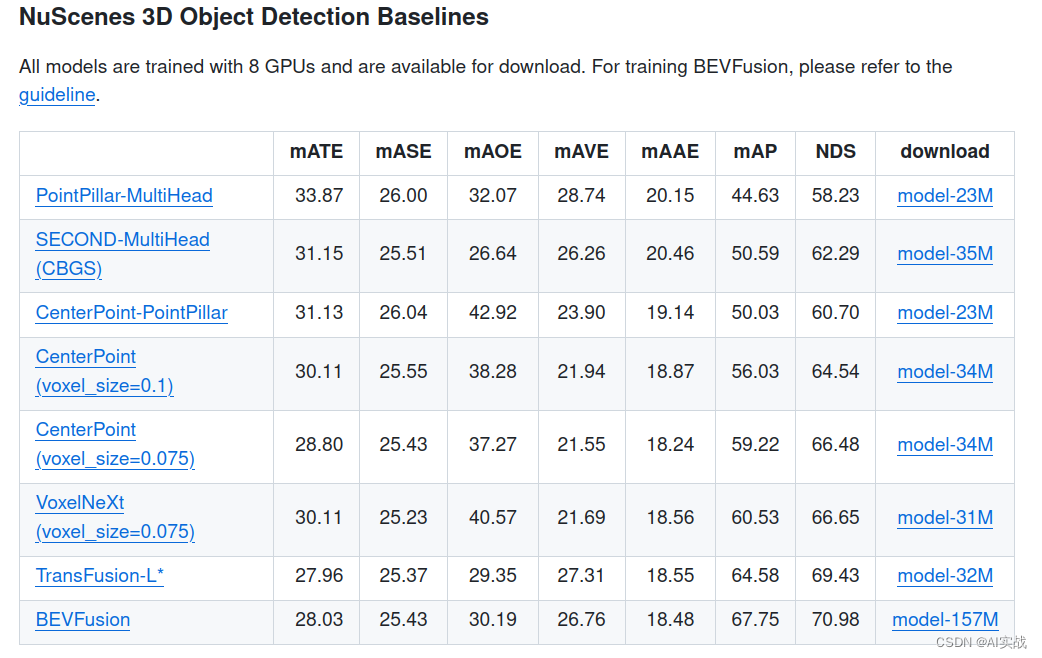
OpenPCDet集成了最新的深度學習技術,包括BEVFusion, Transfusion,CaDDN。這些技術使得OpenPCDet能夠高效地處理點云數據,并實現對物體的精確檢測。
易用性
OpenPCDet不僅適用于研究者,也適合工業界的開發者使用。其簡潔獨立的開源平臺降低了進入3D視覺領域的難度,同時也為提升現有應用的性能提供了可能.
大量的預訓練模型可以用來遷移學習。
結論
OpenPCDet作為一個功能強大且用戶友好的3D點云目標檢測工具,無論是對于學術研究者還是工業界開發者,都提供了巨大的幫助。它通過集成最新技術和算法,降低了3D目標檢測領域的入門門檻,并為提升現有應用的性能提供了強大動力。如果您對3D計算機視覺或自動駕駛領域充滿熱情,OpenPCDet絕對值得一試。














通過上下文傳遞附加數據)

)

的三種成員修飾符(public、private、protected)總結)
