PID控制中的積分到底是什么,為什么它可以將矩形線轉換為曲線,
這個問題呢其實道理很簡單,用到的是初中的知識
我們做幾個測試案例
如下面matlab搭建了積分1/s
那顯示如下(紅色曲線相當于加速度、藍色曲線相當于速度):
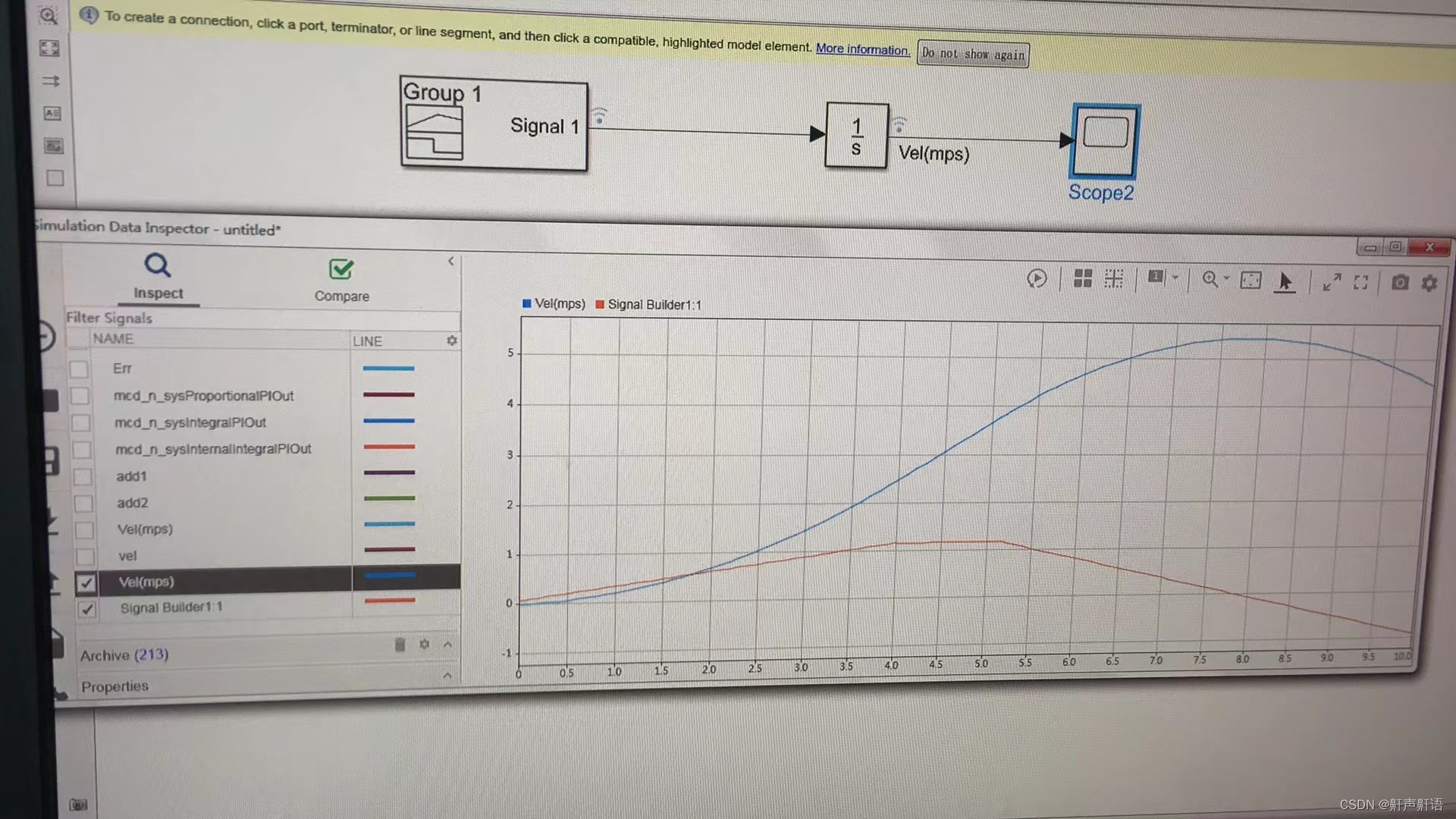
可以看到加速度的變化,積分到了速度,如果加速度先增大,那么速度就會出現快速曲線上升,然后加速度恒定后,速度增加的變成了一個直線,如果加速度減小,那么速度就變成了緩慢增加的過程,這樣就直觀的看到加速度和速度之間的關系了
那么實際工況中,(紅色扭矩、藍色實際轉速、黃色需求轉速)我們使用轉速差經過PID轉換為扭矩,扭矩控制電機,那么這個時候如果轉速差為一個矩形,而且中間有恒定值的話,那么扭矩值就會出現s曲線這樣,實際工況中,如果我們限制扭矩值太低的話,那么達不到需求的轉速,所以會出現實際轉速鋸齒波的情況,如果下圖:
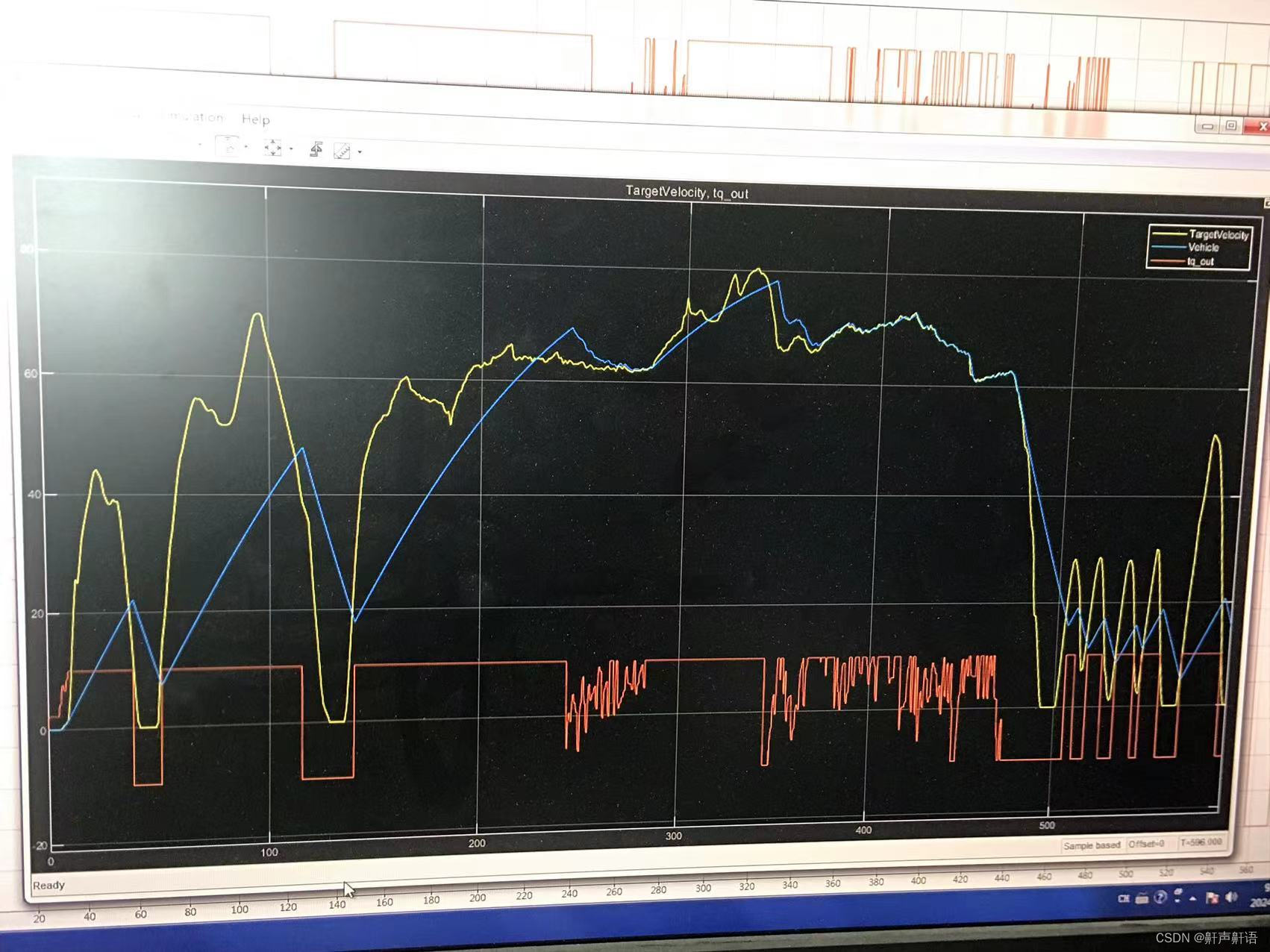
那么正常情況應該是放大一些扭矩限制,這樣讓轉速快速達到,實際情況就會變成這樣

我們的參考模型是如圖:

1/s或者后面的離散積分模塊就是做積分使用的。
這里的扭矩有點像加速度,實際產生的轉速像速度
需要PID模塊的,關注后私信



-- FGHIJ開頭)









 關閉窗口不生效的處理方案)





