在機器人中實現類似生命的自主性一直是研究的方向,但目前大多數軟體機器人仍依賴外部刺激操控來產生持續運動。為了實現能夠自我調節感知 、 決策和驅動的自主物理智能(autonomous physical intelligence,API),一種有前景的方法是在材料中嵌入非線性時滯反饋機制(nonlinear time-lag feedback)。鑒于此,加州大學洛杉磯分校賀曦敏教授及博士后陳馳、博士生施鵬舉等人聯合Timothy J. White 教授,Rebecca Kramer-Bottiglio教授,Metin Sitti 教授,Tetsuya Iwasaki教授就如何實現此類反饋做了總結,并追溯了此類軟體機器人的發展歷程及不同的應用領域 。該 工 作 以 題 為 “Advancing physical intelligence for autonomous soft robots”發 表在最新一期的《Science Robotics》上,得到上海交通大學劉河洲 教授與陳玉潔研究員的支持。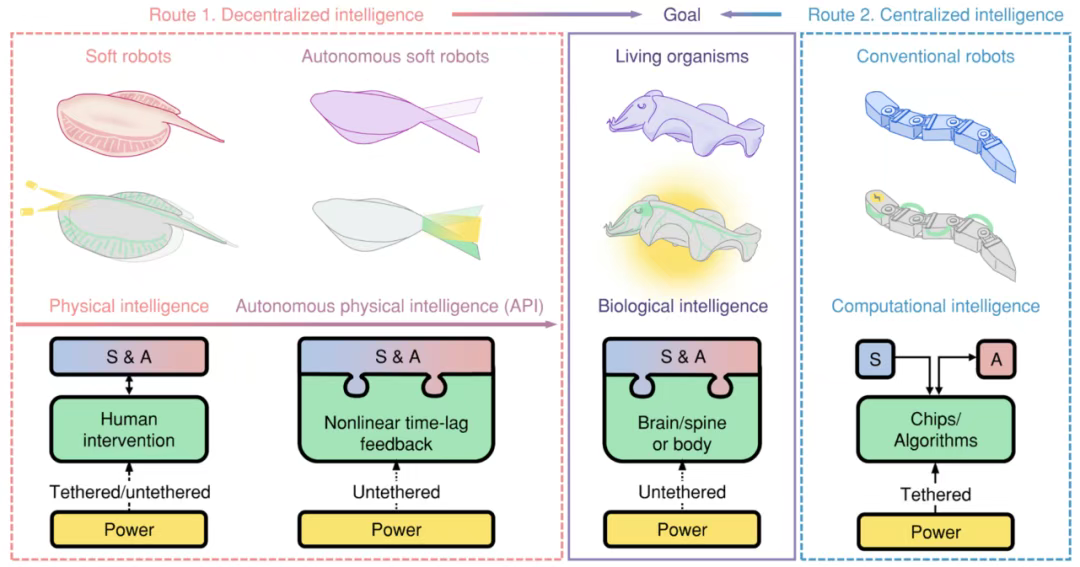
Fig.1.Two distinct routes for the development of bioinspired robots.圖1展示了仿生機器人發展的兩條主要路線:一是基于中央處理器和算法的”計算智能(computationalintelligence)”,通過集成傳感器、執行器、決策模塊和能源模塊實現集中或分布式控制:二是“物理智能(physical intelligence)",即將感知、決策和驅動等功能直接嵌入材料本體,實現去中心化的智能。其中,物理智能通過內嵌的非線性時滯反饋,使各部分都能自主感知和響應外界,實現無需人工干預的持續自主運動,推動軟體機器人向類生命系統演進。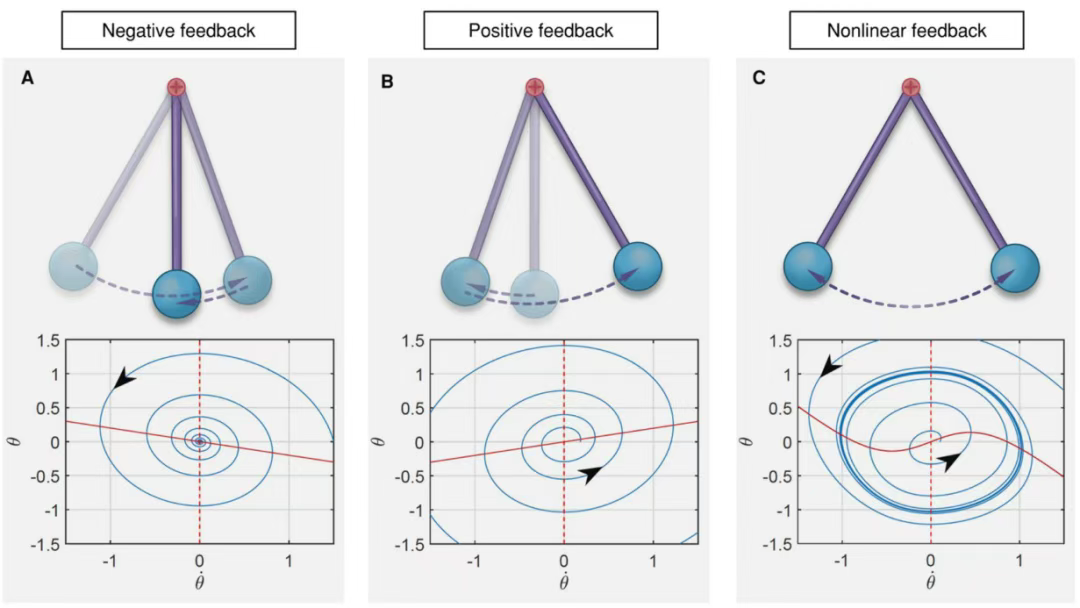
Fig.2.Comparison of various feedback systems and their trajectories.圖2比較了不同反饋系統的動力學軌跡:A為負反饋系統,擾動后狀態會逐漸收斂回平衡點,實現系統穩定;B為正反饋系統,擾動會被放大,導致系統遠離平衡點,直至不穩定;C為非線性反饋系統結合了正負反饋,系統可形成穩定的極限周期,實現持續周期性振蕩。該圖直觀展示了反饋類型對系統行為的決定性影響,是理解自主軟體機器人運動的理論基礎。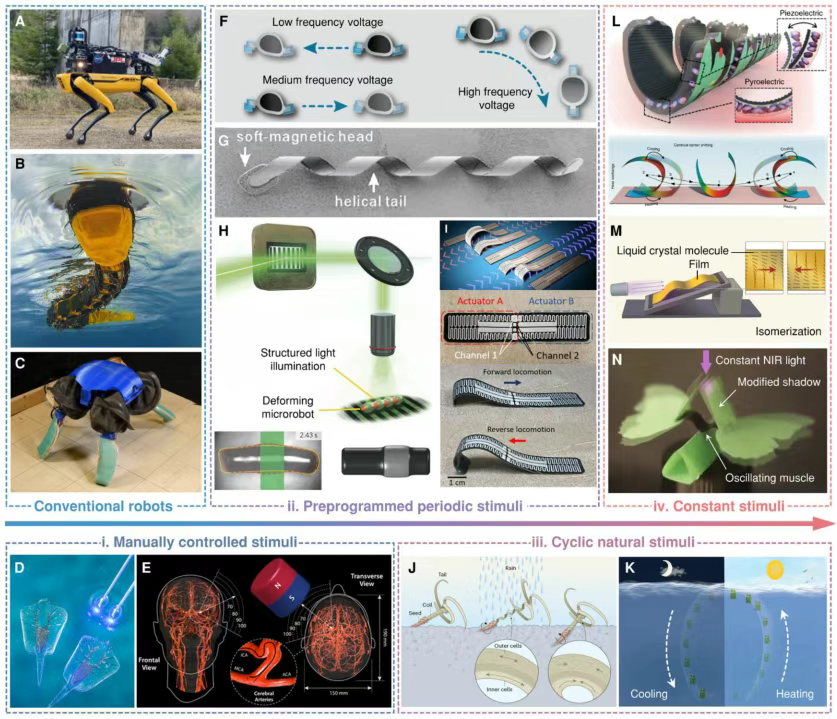
Fig.3. Evolution of conventional robots and soft robots with anincreasing level of autonomy圖3表明引入對于外界刺激的控制將會影響軟體機器人的自主性類似于傳統機器人從手動控制、預設響應到機器學習的演進路徑。作者以控制軟體機器人的刺激方式將其劃分為四個階段:(i)完全人工控制、(ii)預設周期性刺激、(iii)自然界周期性刺激,以及(iv)恒定刺激的自持續運動。其中前三階段依賴負反饋環維持系統穩定體現基礎的物理智能,而第四階段則通過非線性時滯反饋機制,推動實現真正的API。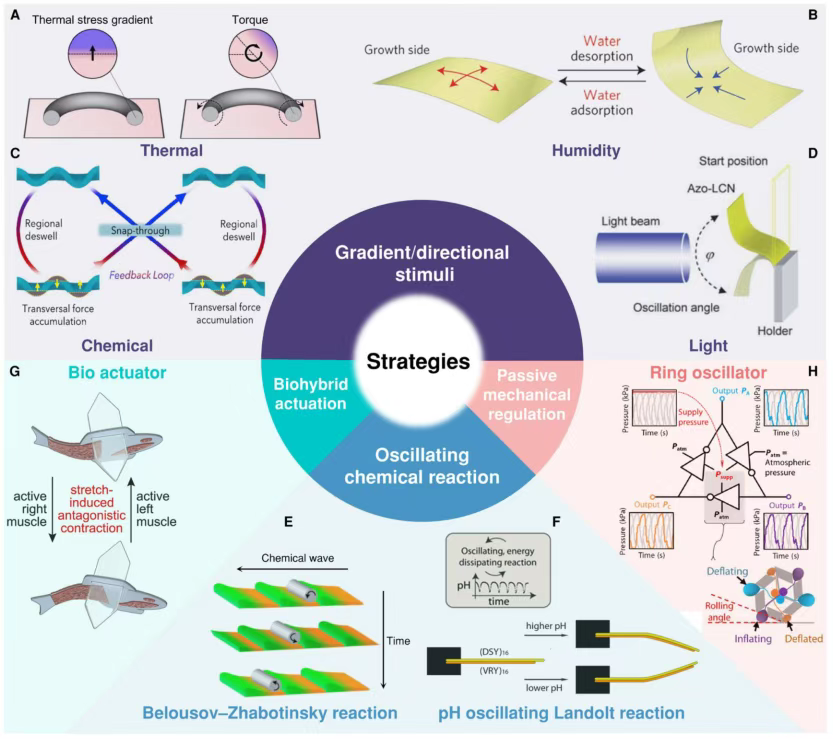
Fig.4.Strategies to create self-continuous motions圖 4 總結了實現基于 API自持續運動的多種策略,主要包括四類機制:(i)通過構建具有梯度或方向性的外部刺激場(如溫度、濕度、化學或光照梯度)誘導運動;(ii)基于化學振蕩反應,如 Belousov-Zhabotinsky 反應驅動的周期性形變;(iii)利用生物雜交系統,將活細胞或肌肉組織嵌入材料中以實現活體式驅動;以及(iv)通過被動機械結構設計。這些策略展示了在不依賴復雜電子控制的條件下,通過材料-結構-環境的耦合設計實現類生命體的持續運動能力。此外,文章進一步總結了基于 API實現的自持續運動在多種環境中的表現形式,包括陸地運動(如行走、爬行、翻轉、滾動、跳躍)水中運動(如波動、振蕩、漂浮、脈動)、潛在的空中運動(如拍翼旋轉、飄浮)、以及多環境下多模態運動。作者還指出,為實現真正的系統級自主軟體機器人,未來需重點發展若干關鍵方向,包括:擴大尺寸以突破微型尺寸的限制、能量獲取與利用、群體行為、多功能集成,以及建模與仿真。最終,作者強調實現高度自主軟體機器人的過程本質上是高度跨學科的,需化學、材料學、力學、數學、機器人學與生物學等多個領域的協同合作。未來的 API軟體機器人將能夠利用環境能量驅動,具備多模態運動能力、信息存儲、通信與環境響應決策機制,并展現出大規模群體智能行為,從而更貼近現實工程應用的需求。
Science Robotics:UCLA 賀曦敏團隊綜述自主軟體機器人
本文來自互聯網用戶投稿,該文觀點僅代表作者本人,不代表本站立場。本站僅提供信息存儲空間服務,不擁有所有權,不承擔相關法律責任。 如若轉載,請注明出處:http://www.pswp.cn/web/82913.shtml 繁體地址,請注明出處:http://hk.pswp.cn/web/82913.shtml 英文地址,請注明出處:http://en.pswp.cn/web/82913.shtml
如若內容造成侵權/違法違規/事實不符,請聯系多彩編程網進行投訴反饋email:809451989@qq.com,一經查實,立即刪除!相關文章

基于LangChain構建高效RAG問答系統:向量檢索與LLM集成實戰
基于LangChain構建高效RAG問答系統:向量檢索與LLM集成實戰
在本文中,我將詳細介紹如何使用LangChain框架構建一個完整的RAG(檢索增強生成)問答系統。通過向量檢索獲取相關上下文,并結合大語言模型,我們能夠…
)
【Java學習筆記】SringBuffer類(重點)
StringBuffer(重點)
1. 基本介紹 (1)StringBuffer是可變的字符序列,可以對字符串內容驚醒增刪 (2)很多方法喝String相同,但StringBuffer可變長度 (3)Strin…

計算機網絡領域所有CCF-A/B/C類期刊匯總!
本期小編統計了【計算機網絡】領域CCF推薦所有期刊的最新影響因子,分區、年發文量以及投稿經驗,供大家參考! CCF-A類
1 IEEE Journal on Selected Areas in Communications
【影響因子】13.8
【期刊分區】JCR1區,中科院1區TOP …
)
AI-Sphere-Butler之如何啟動AI全能管家教程(WSL測試環境下適用)
環境:
Ubuntu20.04
WSL2
問題描述:
AI-Sphere-Butler之如何啟動AI全能管家教程(WSL測試環境下適用)
解決方案:
打開管家大模型
1.運行大模型在cmd下輸入:
ollama run qwen2.5-3bnsfwny運行管家
數字人運行腳本ÿ…

【python深度學習】Day 47 注意力熱圖可視化
知識點:熱力圖 作業:對比不同卷積層熱圖可視化的結果 一、概念 為了方便觀察輸出,將特征圖進行可視化。特征圖本質就是不同的卷積核的輸出,淺層指的是離輸入圖近的卷積層,淺層卷積層的特征圖通常較大,而深層…

C#語音識別:使用Whisper.net實現語音識別
C#語音識別:使用Whisper.net實現語音識別
在當今數字化時代,語音識別技術已廣泛應用于智能助手、語音轉文字、會議記錄等眾多領域。對于 C# 開發者而言,如何快速、高效地實現語音識別功能呢?今天,我們就來介紹一個強大…

開源分享|適合初創商家的餐飲系統,基于thinkphp8+element-plus
一、項目介紹
三勾餐飲點餐連鎖版系統是一個基于thinkphp8element-plusuniapp打造的面向開發的小程序商城的全面解決方案,旨在為連鎖餐飲企業提供高效的點餐與管理服務。該系統支持多端應用發布,包括微信小程序、H5、安卓及iOS平臺,實現數據…
)
rec_pphgnetv2完整代碼學習(一)
rec_pphgnetv2是paddleocr_v5中的重要改進,因此對其完整代碼進行學習十分之有必要。
一、IdentityBasedConv1x1
這段代碼定義了 IdentityBasedConv1x1 類,它是 PaddleOCRv5 中 rec_pphgnetv2 模型的關鍵改進之一。該層通過將恒等映射(Ident…

vue3+dify從零手擼AI對話系統
vue3dify從零手擼AI對話系統
前言 近年來,人工智能技術呈現爆發式增長,其應用已深度滲透至各行各業。甚至家里長輩們也開始借助AI工具解決日常問題。作為程序員群體,我們更應保持技術敏銳度,緊跟這波浪潮。 回溯求學時期…

robot_lab train的整體邏輯
Go2機器人推理(Play)流程詳細分析
概述
本文檔詳細分析了使用命令 python scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Rough-Unitree-Go2-v0 進行Go2機器人推理的完整流程,基于實際的代碼實現,包括模型加載、環境配置調整、推理循環…

Python Day45
Task: 1.tensorboard的發展歷史和原理 2.tensorboard的常見操作 3.tensorboard在cifar上的實戰:MLP和CNN模型 效果展示如下,很適合拿去組會匯報撐頁數:
作業:對resnet18在cifar10上采用微調策略下,用tens…

MySQL SQL 優化:從 INSERT 到 LIMIT 的實戰與原理
在數據庫驅動的現代應用中,SQL 查詢的性能直接決定了用戶體驗和系統效率。本文將深入探討 MySQL (特別是 InnoDB 存儲引擎)中常見的 SQL 性能瓶頸,并結合實際案例,詳細剖析從數據插入到復雜分頁查詢的優化策略與底層實…


HTTP 請求協議簡單介紹
目錄 常見的 HTTP 響應頭字段
Java 示例代碼:發送 HTTP 請求并處理響應
代碼解釋:
運行結果:
文件名:
總結: HTTP(HyperText Transfer Protocol)是用于客戶端與服務器之間通信的協議。它定…

《100天精通Python——基礎篇 2025 第5天:鞏固核心知識,選擇題實戰演練基礎語法》
目錄 一、踏上Python之旅二、Python輸入與輸出三、變量與基本數據類型四、運算符五、流程控制 一、踏上Python之旅
1.想要輸出 I Love Python,應該使用()函數。
A.printf()
B.print()
C.println()
D.Print() 在Python中想要在屏幕中輸出內容,應該使用print()函數…

求解一次最佳平方逼近多項式
例
設 f ( x ) 1 x 2 f(x)\sqrt{1x^2} f(x)1x2 ?,求 [ 0 , 1 ] [0,1] [0,1]上的一個一次最佳平方逼近多項式。
解 : d 0 ∫ 0 1 1 x 2 d x 1 2 ln ? ( 1 2 ) 2 2 ≈ 1.147 d_0\int_{0}^{1}\sqrt{1x^2}dx\frac{1}{2}\ln(1\sqrt{2})\frac{\sqrt…

在Ubuntu上使用 dd 工具制作U盤啟動盤
在Ubuntu上使用 dd 工具制作U盤啟動盤
在Linux系統中,dd 是一個功能強大且原生支持的命令行工具,常用于復制文件和轉換數據。它也可以用來將ISO鏡像寫入U盤,從而創建一個可啟動的操作系統安裝盤。雖然圖形化工具(如 Startup Disk…

如何理解OSI七層模型和TCP/IP四層模型?HTTP作為如何保存用戶狀態?多服務器節點下 Session方案怎么做
本篇概覽: OSI 七層模型是什么?每一層的作用是什么?TCP/IP四層模型和OSI七層模型的區別是什么? HTTP 本身是無狀態協議,HTTP如何保存用戶狀態? 能不能具體說一下Cookie的工作原理、生命周期、作用域?使用…

深入剖析 RocketMQ 中的 DefaultMQPushConsumerImpl:消息推送消費的核心實現
前言
在 Apache RocketMQ 的消息消費體系中,RocketMQ 提供了DefaultMQPushConsumer(推送消費)和DefaultMQPullConsumer(拉取消費)兩種主要消費方式。DefaultMQPushConsumer與DefaultMQPullConsumer在消息獲取方式&…

Linux編程:2、進程基礎知識
一、進程基本概念
1、進程與程序的區別
程序:靜態的可執行文件(如電腦中的vs2022安裝程序)。進程:程序的動態執行過程(如啟動后的vs2022實例),是操作系統分配資源的單位(如 CPU 時…