Occupancy Grid Map & Euclidean Signed Distance Field:?
【注意】:目的是為了將有噪聲的傳感器收集起來,用于實時的建圖。
Occupancy Grid Map:
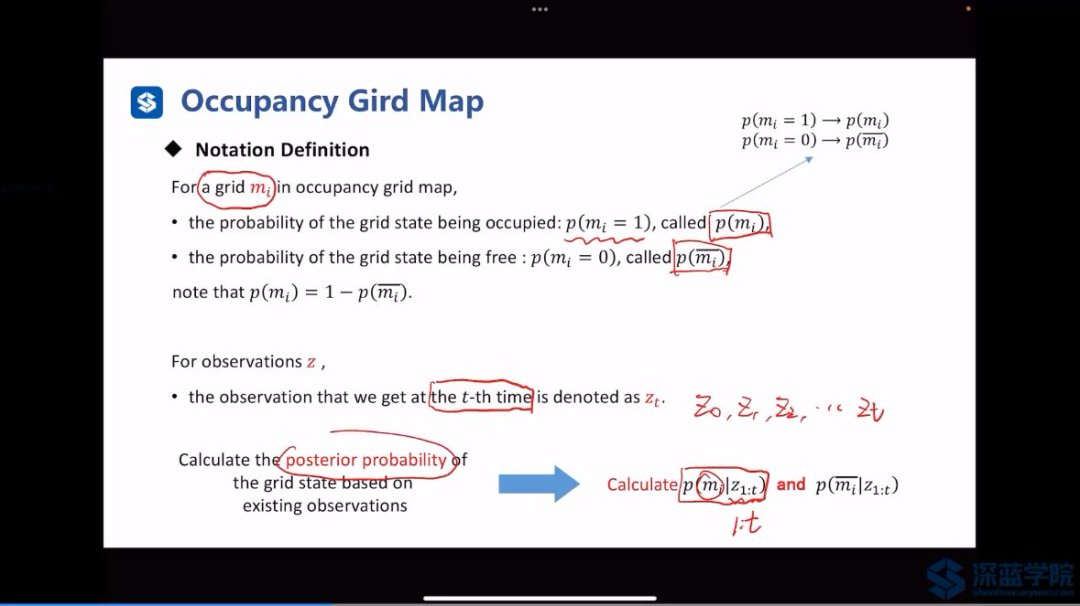
概率柵格:
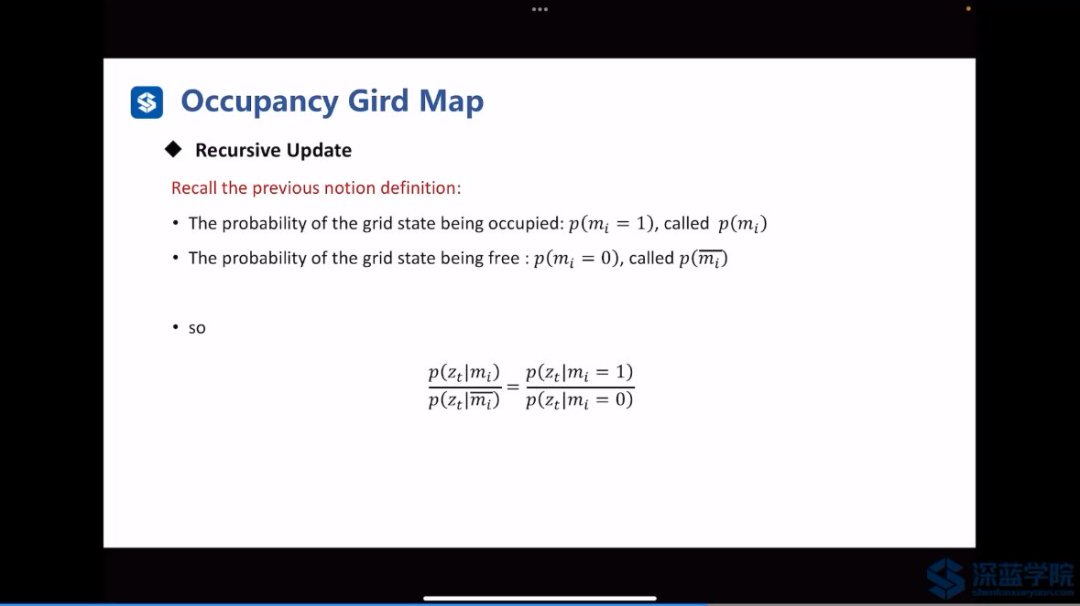
【注意】:由于傳感器帶有噪聲,在實際中基于所有觀測到這個柵格的情況,來計算這個柵格的是否有障礙物的后驗概率。
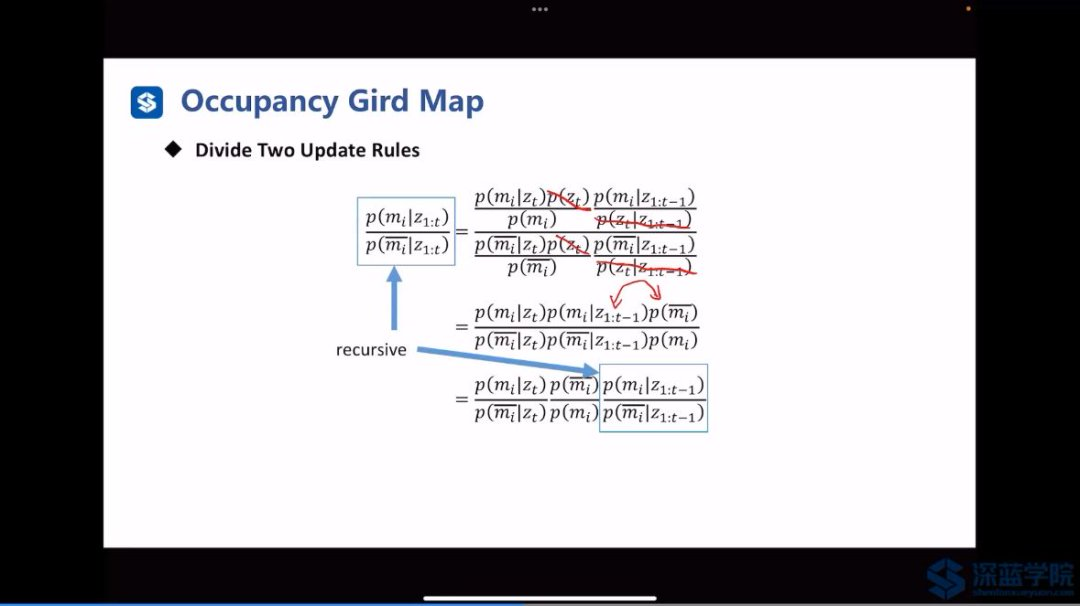
公式化后驗概率部分:
貝葉斯概率公式:
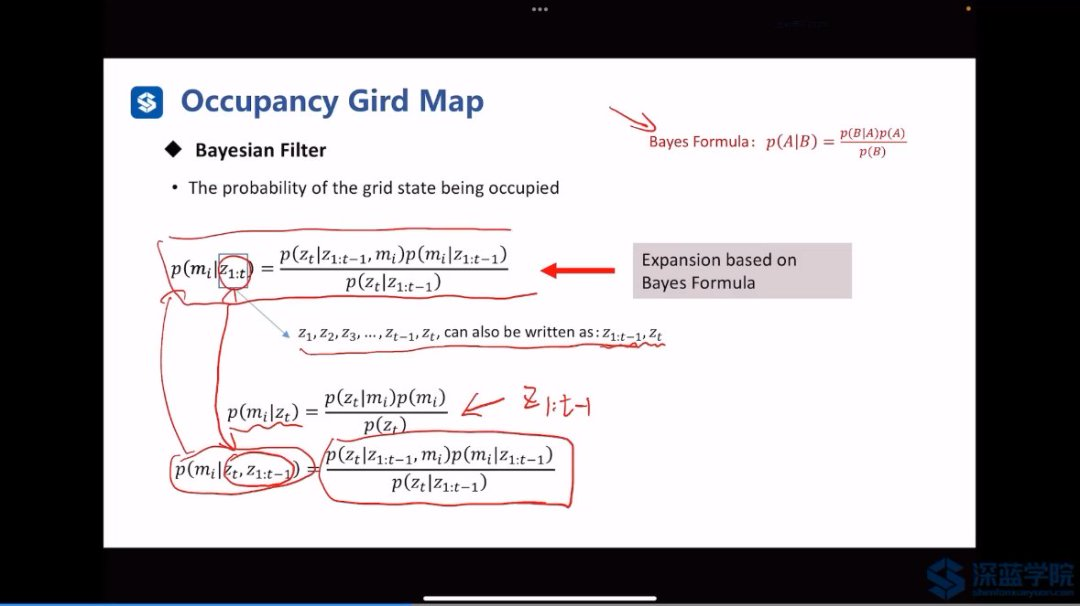
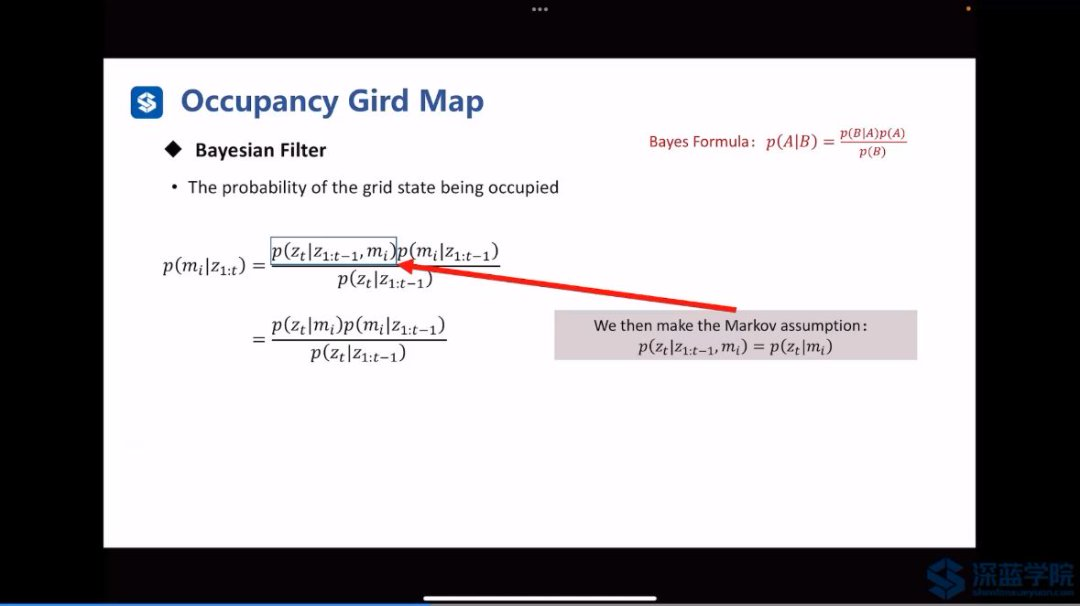
Markov 假設前一次觀測跟后一次觀測獨立無關:
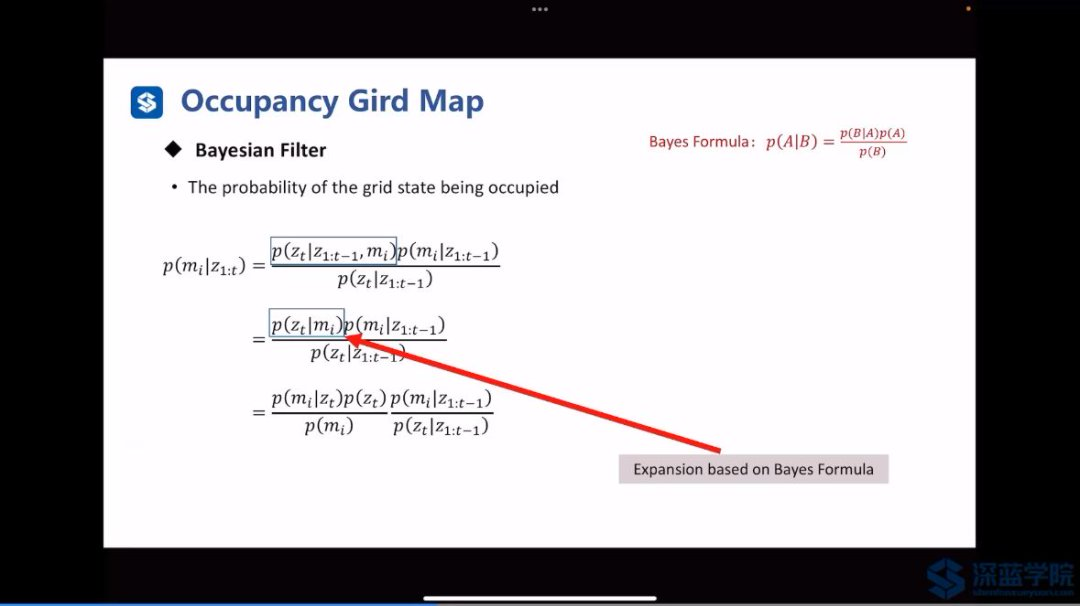
再進行一次貝葉斯展開:
將occupied 和 free的概率全部都寫出來:
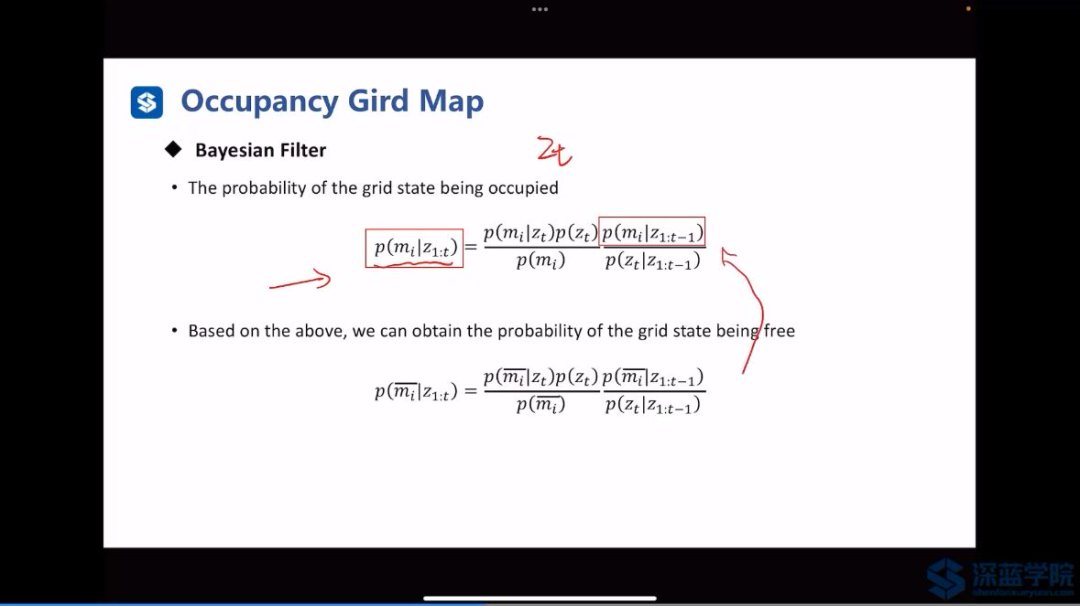
進行簡化,凸顯關系:
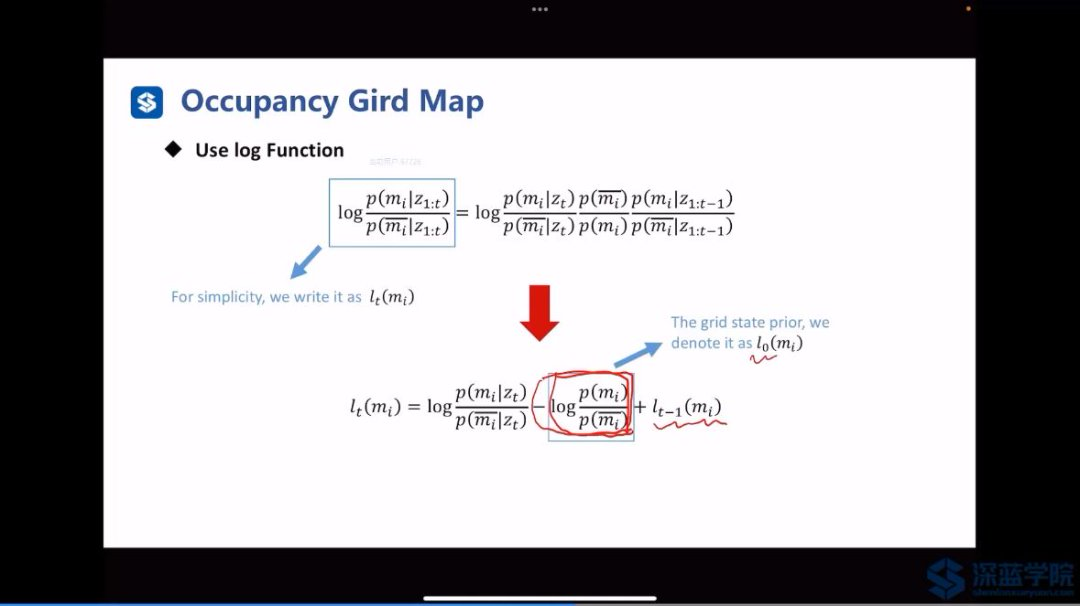
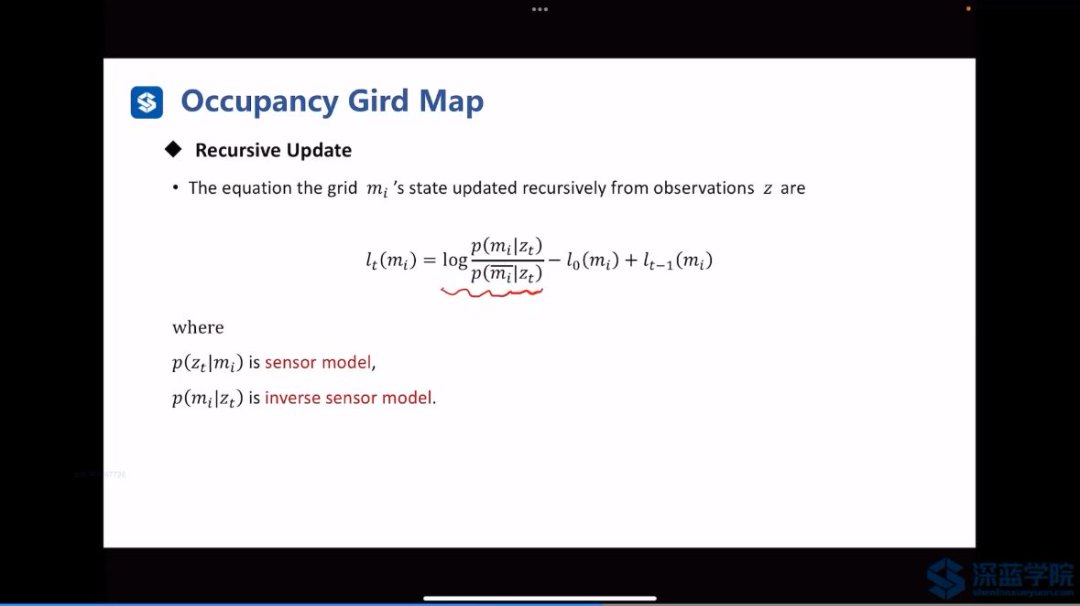
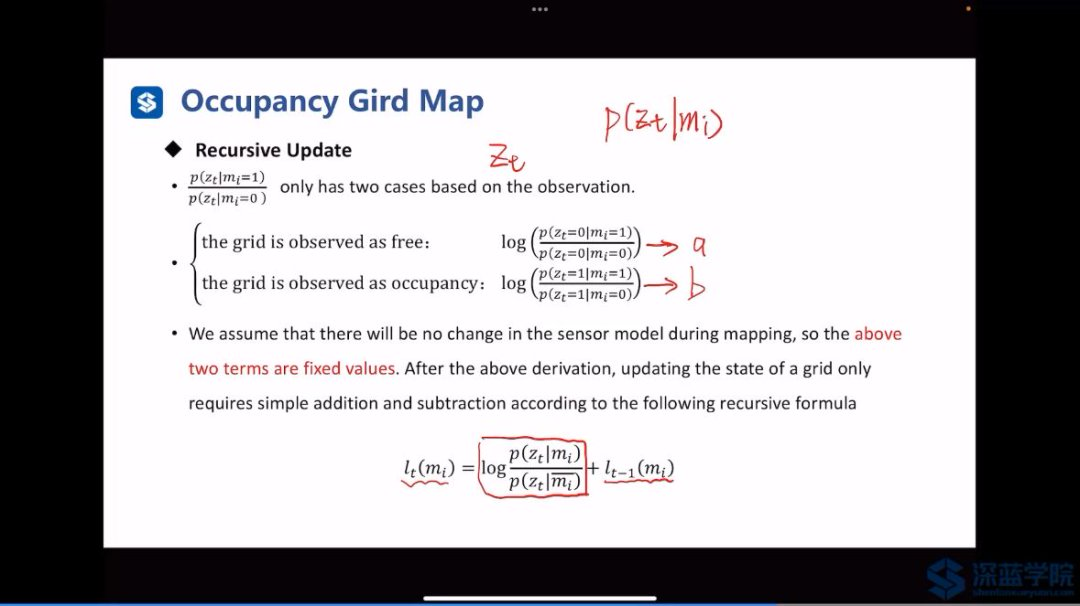
逆傳感器模型:
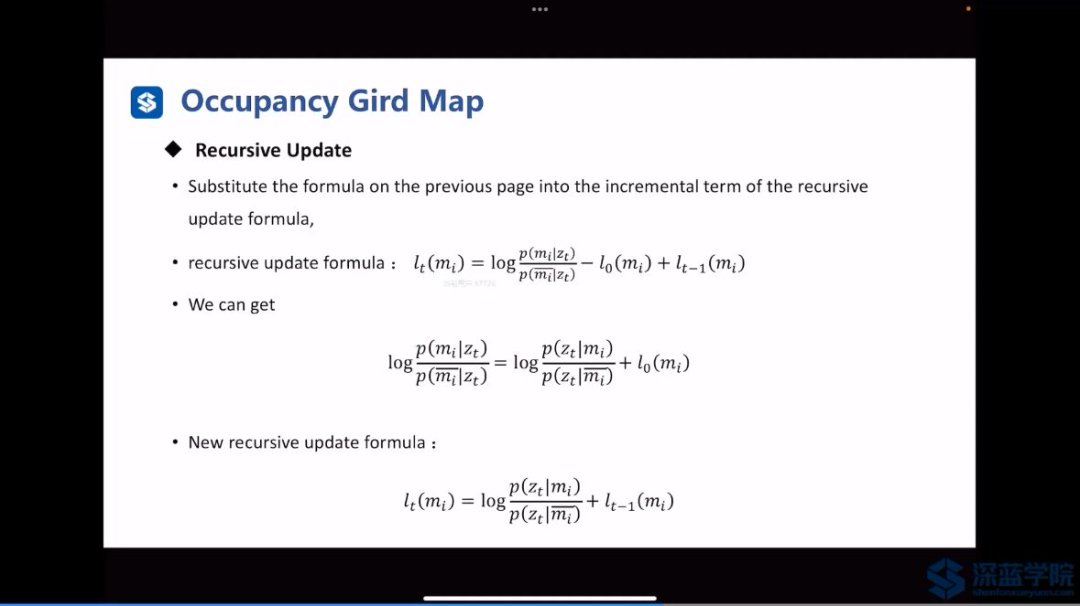
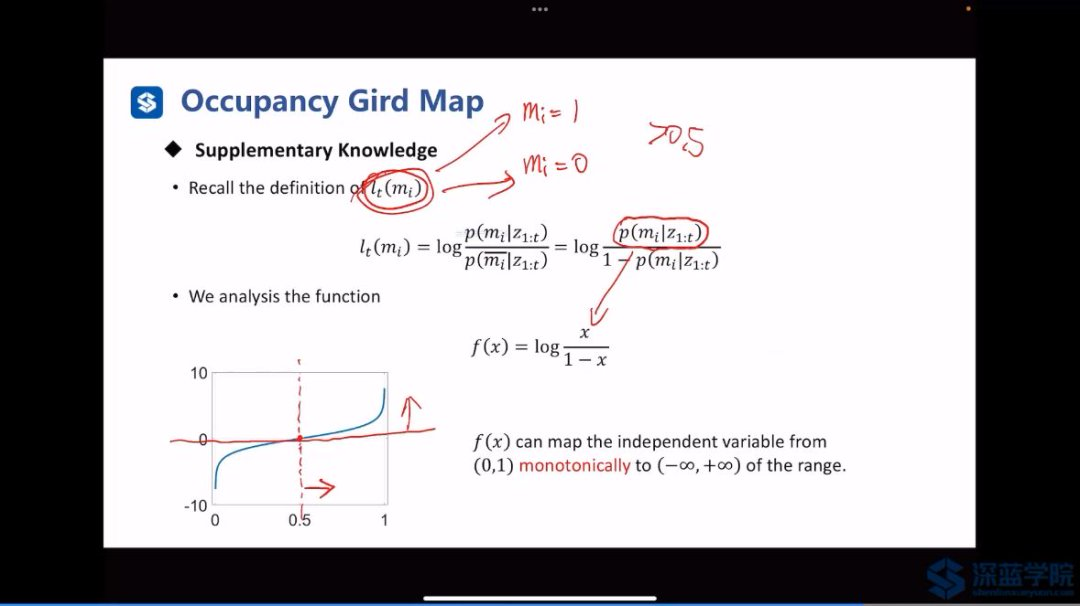
新的遞推更新公式:
 ?占據柵格地圖總結:
?占據柵格地圖總結:
示意圖:
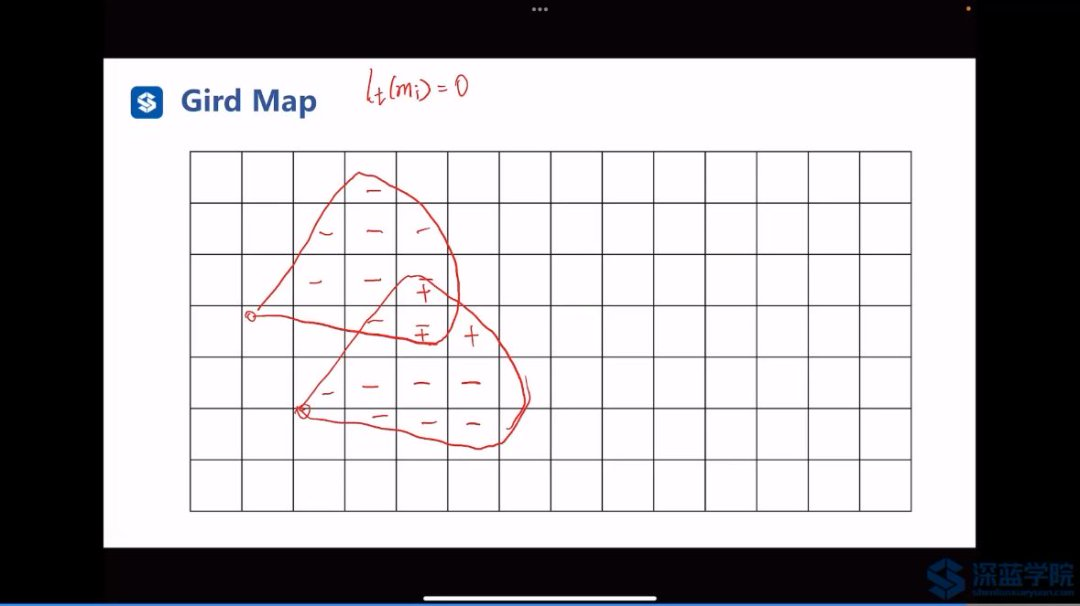
【注意】:如果觀測到為free,則減,如果觀測到的是occupied,則加。
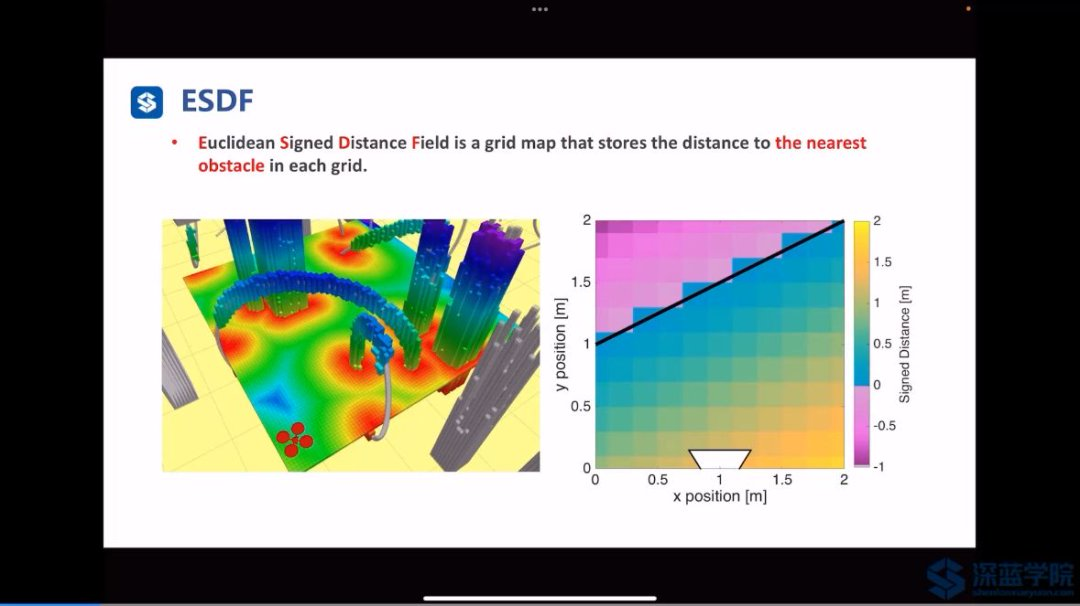
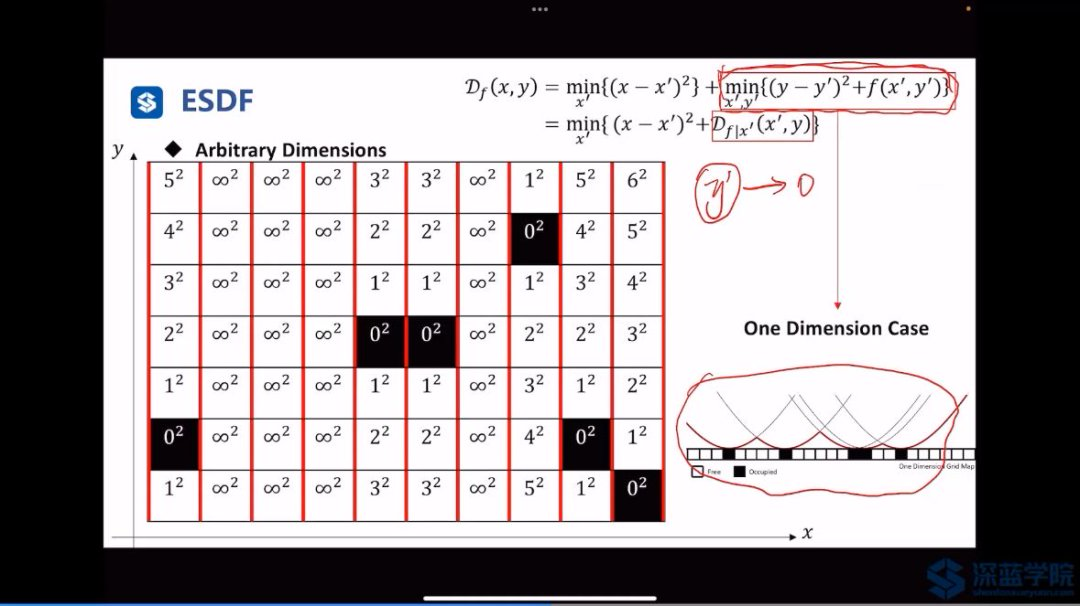
ESDF地圖:
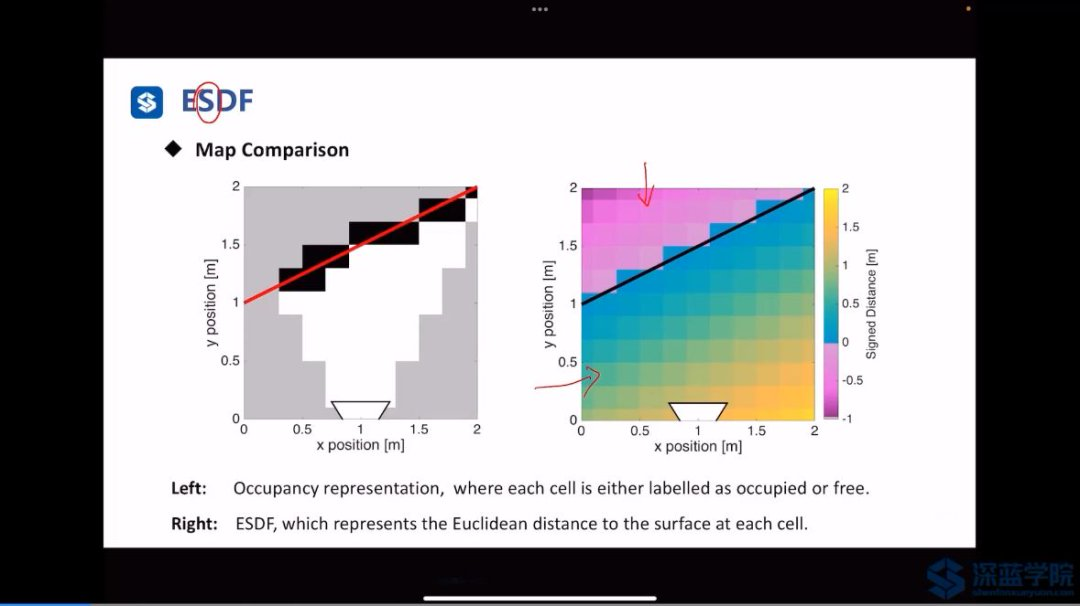
粉紅色區域為負值,因為其為障礙物區域,存儲的是到free柵格的距離,但是要加負號。
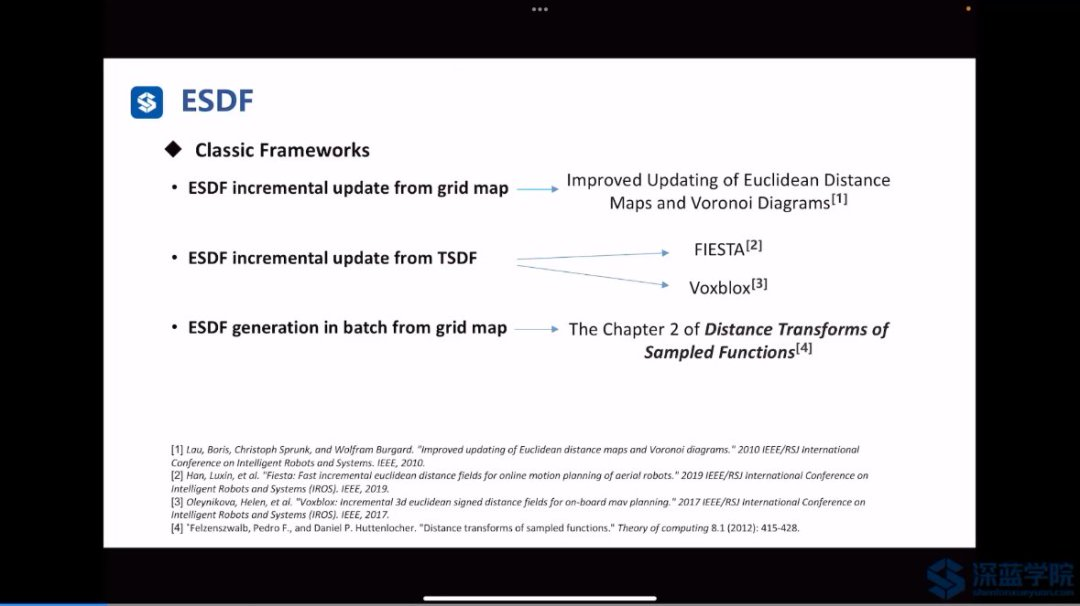
多種建立的方法:
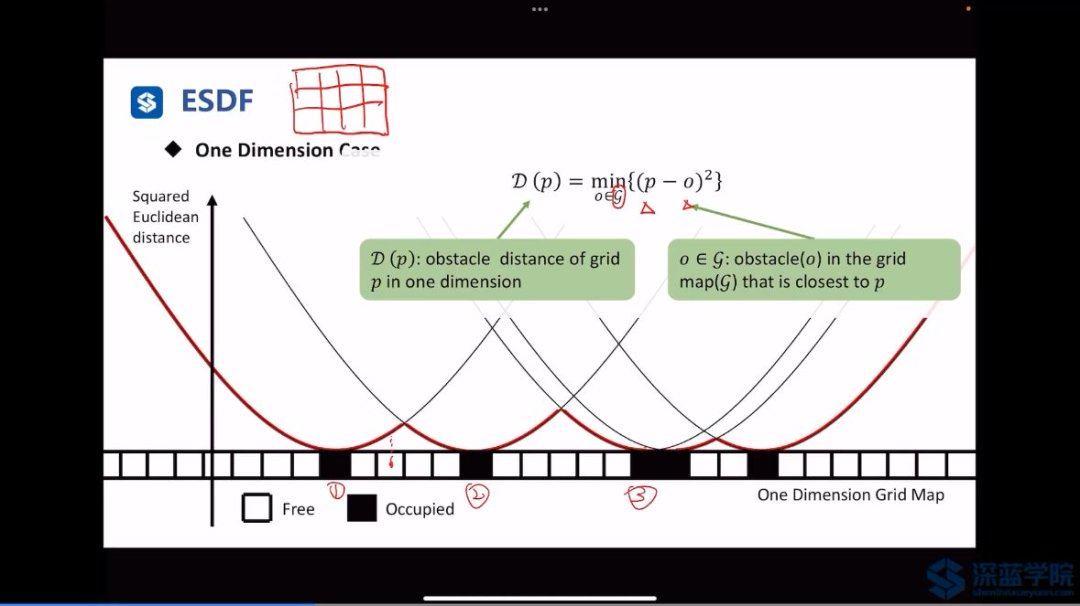
基本思想,求取下包絡:
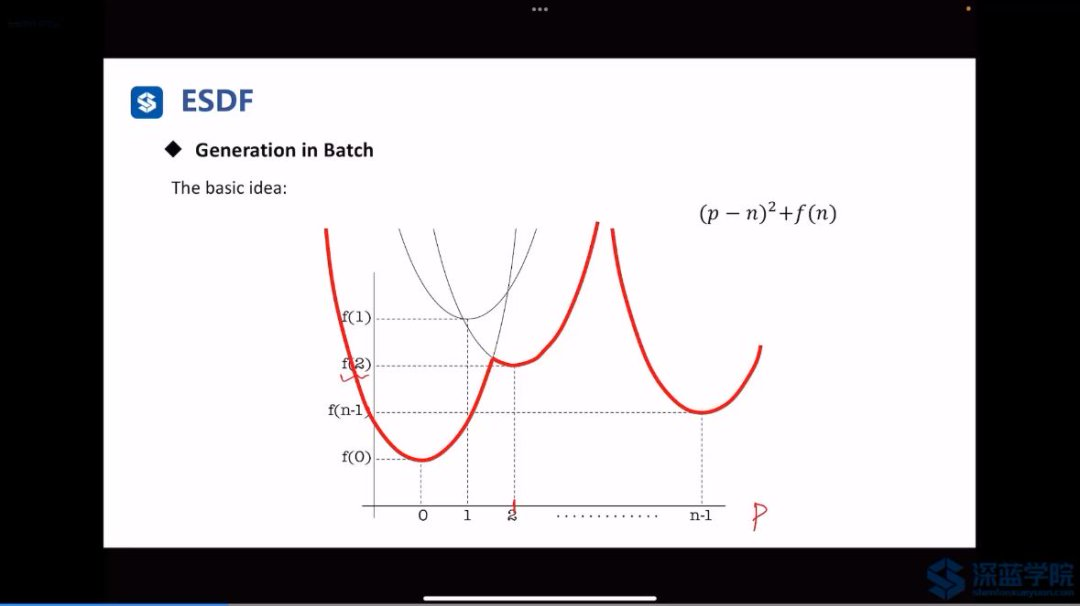
到最近障礙物的距離的平方就是下包絡:
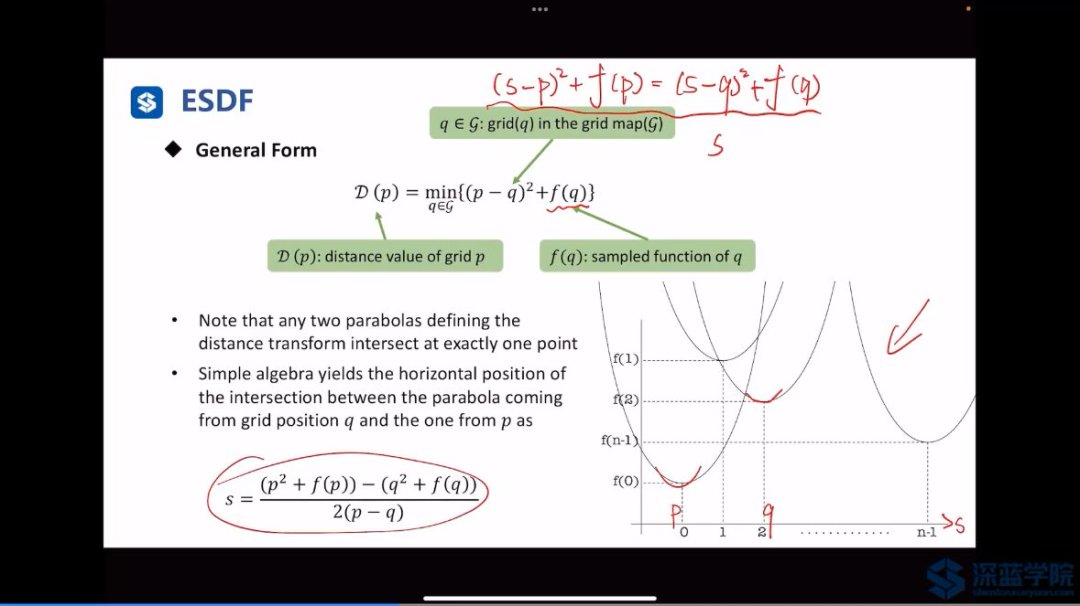
通用的形式:
在多維情況下的作用才能體現。
多維下的 計算:
計算:
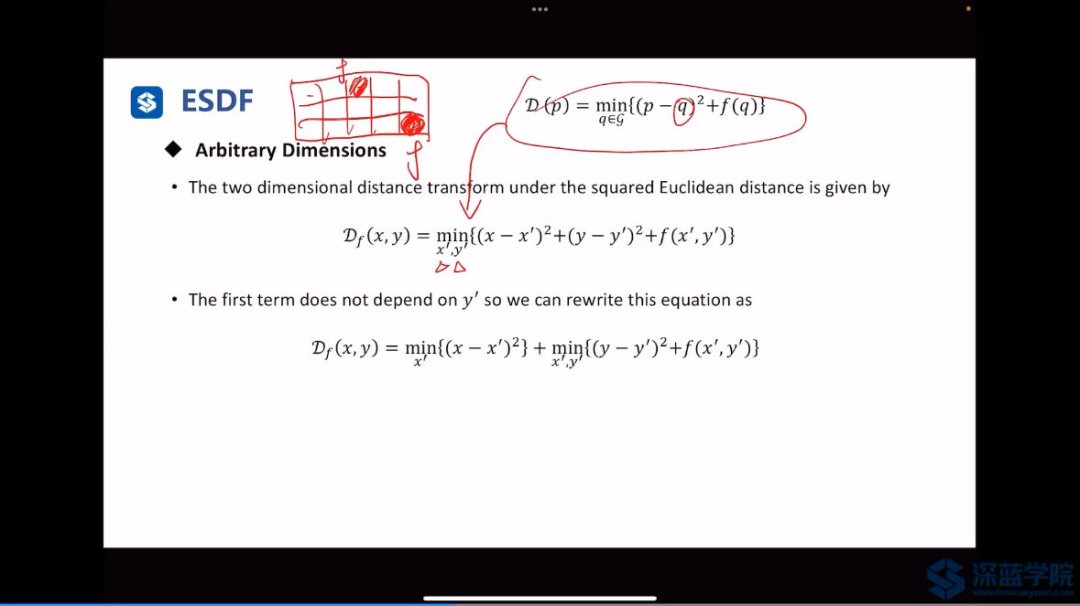
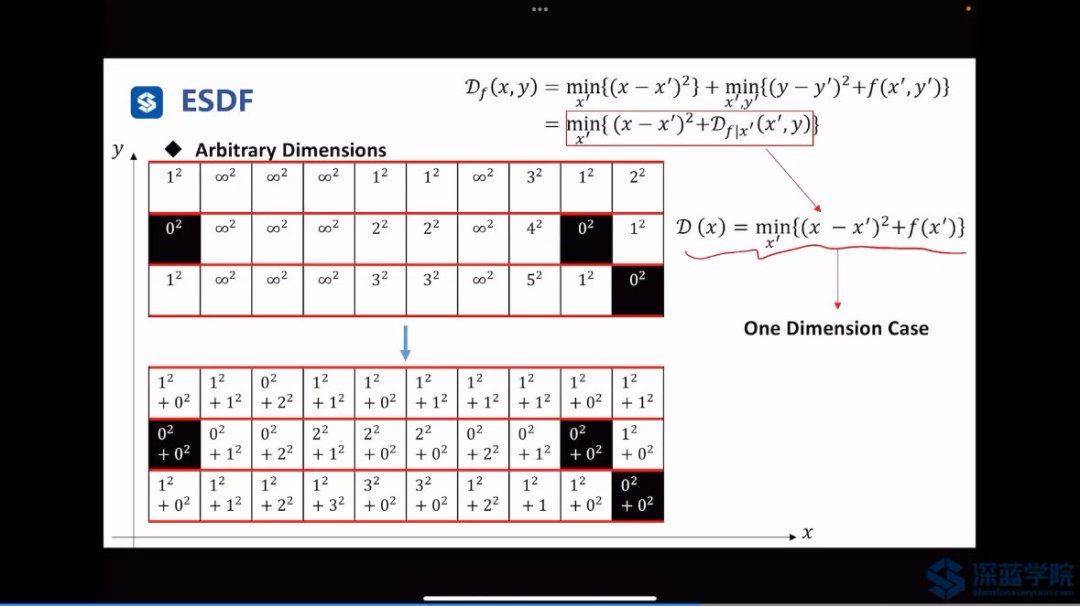
【注意】:每個方向可以分開,在三個方向上各算一次。
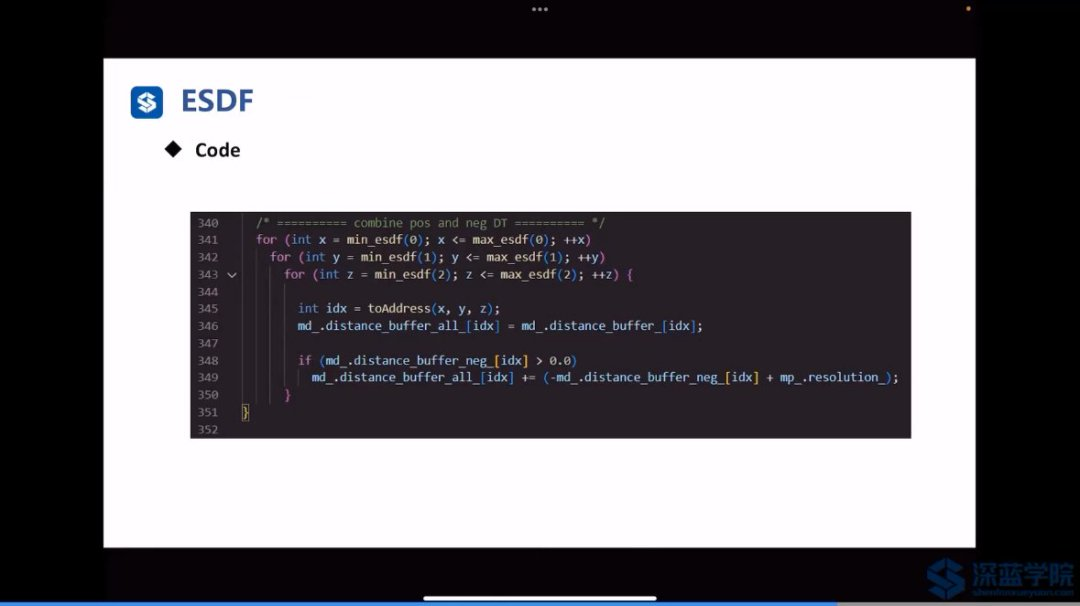
符號:
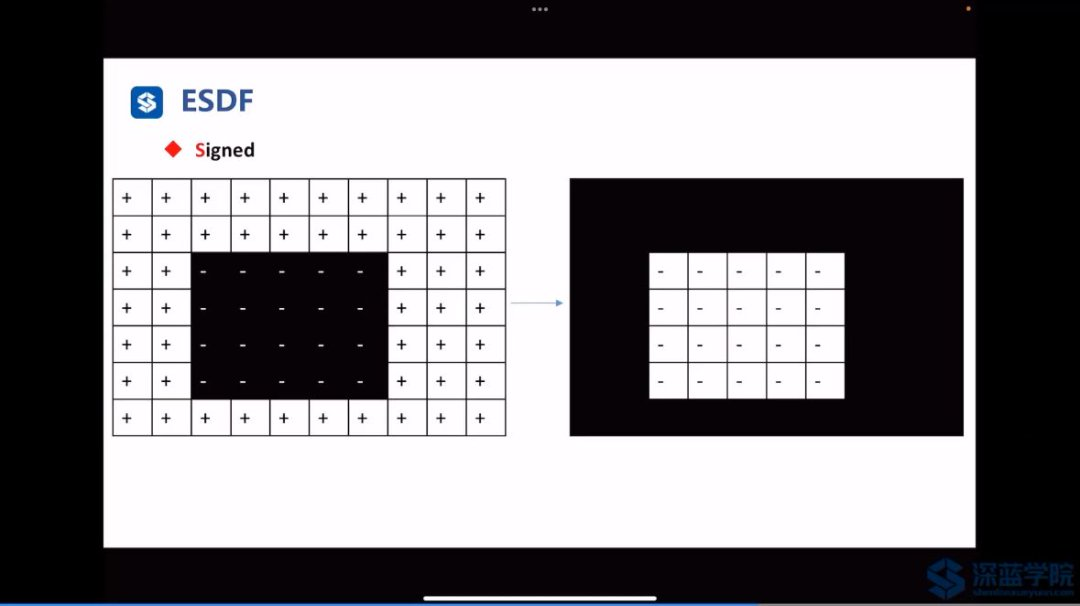
正向與反向的ESDF進行疊加:
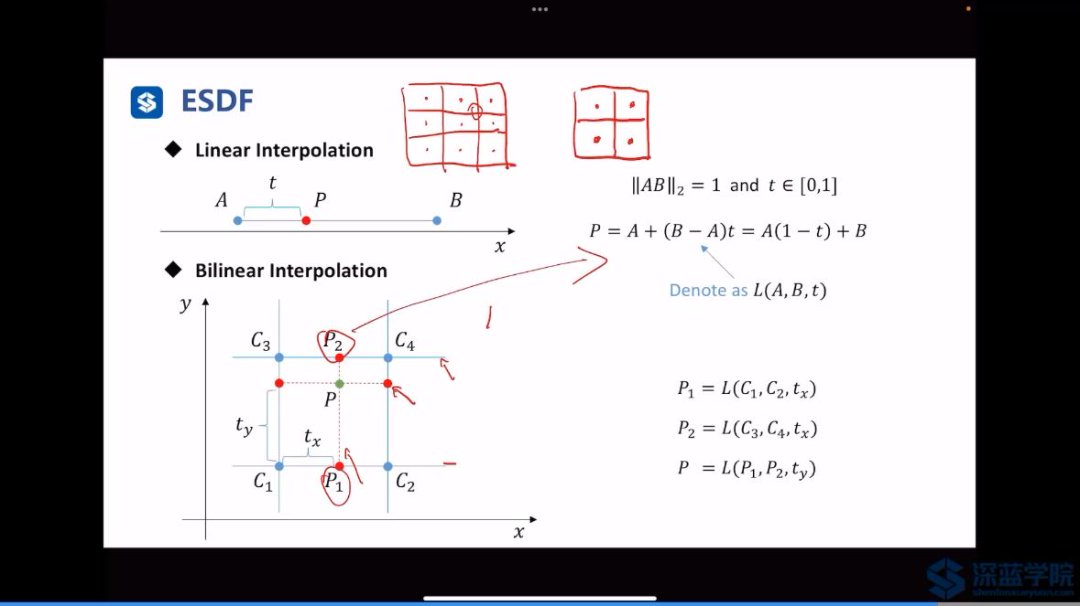
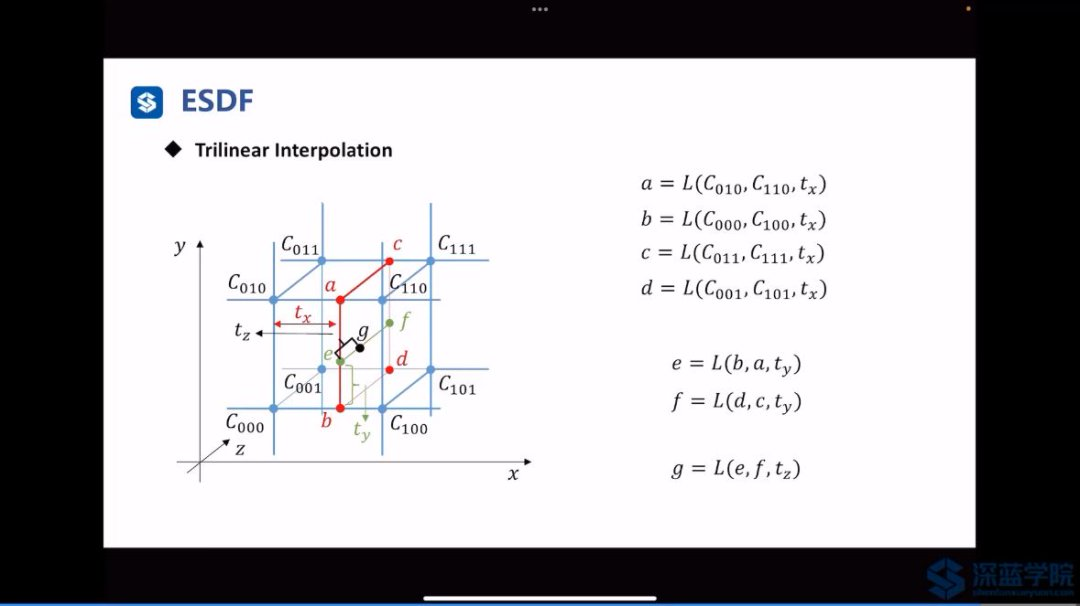
在柵格之間的點,用插值的辦法進行解決:
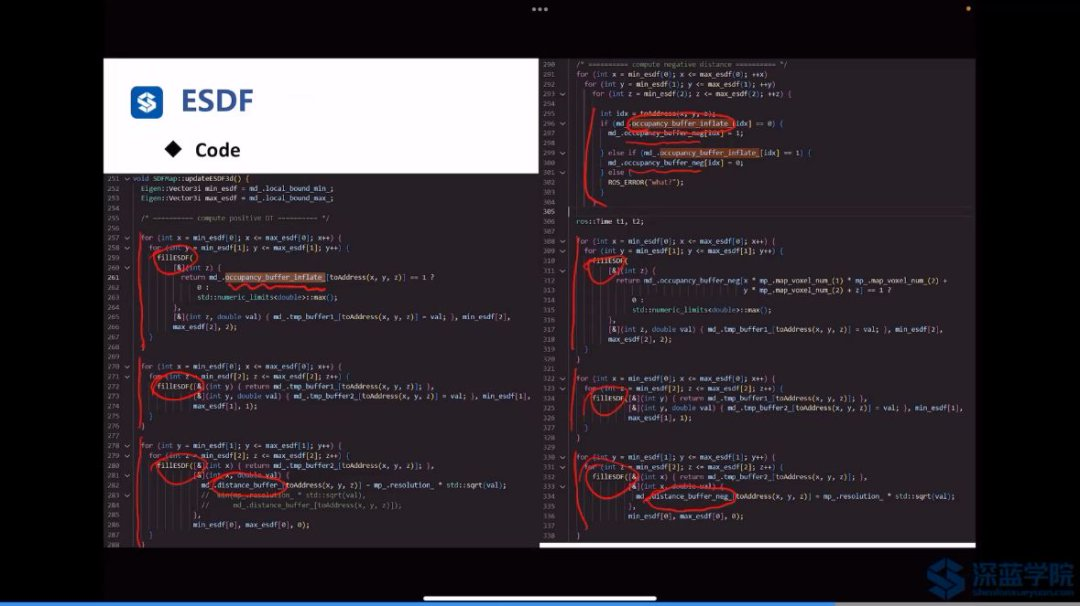
三維的情況:
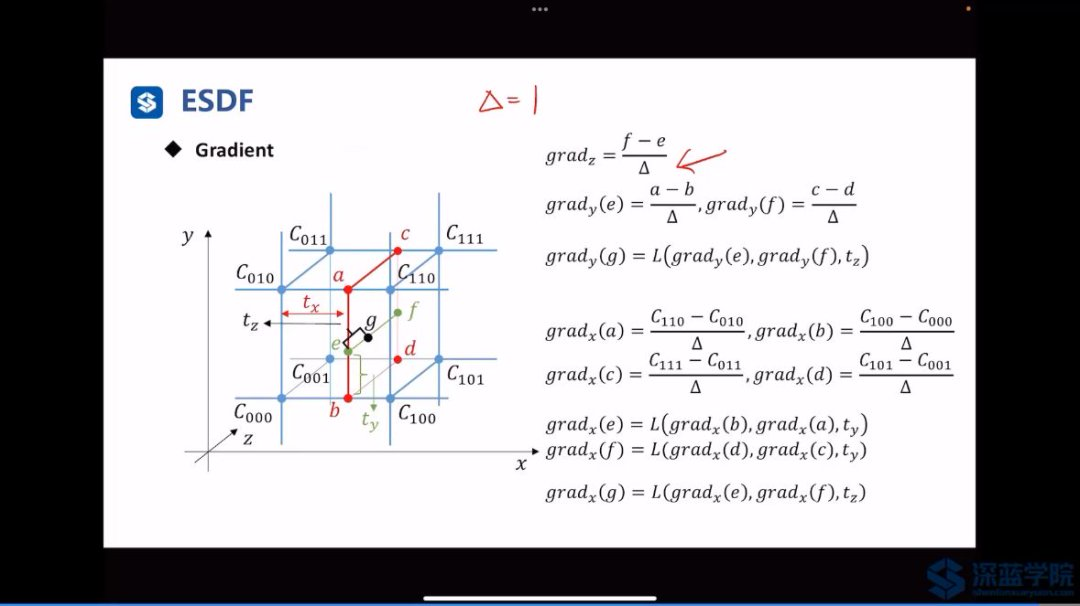
三個方向上的梯度:


![Oracle中的[行轉列]與[列轉行]](http://pic.xiahunao.cn/Oracle中的[行轉列]與[列轉行])

![[ 計算機網絡 ] 深入理解OSI七層模型](http://pic.xiahunao.cn/[ 計算機網絡 ] 深入理解OSI七層模型)









)


:漸進式分層提取模型PLE(Progressive Layered Extraction))

