PyTorch深度學習實戰(46)——深度Q學習
- 0. 前言
- 1. 深度 Q 學習
- 2. 網絡架構
- 3. 實現深度 Q 學習模型進行 CartPole 游戲
- 小結
- 系列鏈接
0. 前言
我們已經學習了如何構建一個 Q 表,通過在多個 episode 中重復進行游戲獲取與給定狀態-動作組合相對應的值。然而,當狀態空間是連續時,可能的狀態空間數會變得非常巨大。在本節中,我們將學習如何使用神經網絡在沒有 Q 表的情況下估計狀態-動作組合的 Q 值,因此稱為深度 Q 學習 (deep Q-learning)。
1. 深度 Q 學習
與 Q 表相比,深度 Q 學習利用神經網絡將任意給定的狀態-動作(其中狀態可以是連續或離散的)組合映射到相應 Q 值。
在本節中,將使用 Gym 中的 CartPole 環境,智能體的任務是盡可能長時間地平衡 CartPole,CartPole 環境如下圖所示:

當小車向右移動時,桿向左移動,反之亦然,CartPole 環境中的每個狀態都由四個觀測值定義,其名稱及其最小值和最大值如下:
| 狀態 | 最小值 | 最大值 |
|---|---|---|
| Cart position | -2.4 | 2.4 |
| Cart velocity | -inf | inf |
| Pole angle | -41.8° | 41.8° |
| Pole velocity at the tip | -inf | inf |
需要注意的是,表示狀態的所有觀測值都具有連續值,用于 CartPole 平衡游戲的深度 Q 學習的工作原理如下:
- 獲取輸入值(游戲圖像/游戲元數據)
- 通過網絡傳遞輸入值,網絡的輸出與可能的動作數相同
- 輸出層預測在給定狀態下采取某個動作對應的 Q 值
2. 網絡架構
網絡架構使用狀態(四個觀測值)作為輸入,在當前狀態下采取左/右動作的 Q 值作為輸出。神經網絡訓練策略如下:
- 在探索階段,執行輸出層中具有最高值的隨機動作
- 將動作、下一個狀態、獎勵和指示游戲是否完成的標志存儲在內存中
- 如果游戲沒有完成,計算在給定狀態下采取行動的 Q 值,即獎勵 + 折扣因子 x 下一個狀態中所有動作的最大可能 Q 值
- 修改采取動作的Q值,而其他狀態-動作組合的 Q 值保持不變
- 多次執行步驟
1到4并存儲經驗 - 擬合模型,將狀態作為輸入,動作值作為預期輸出(來自內存和回放經驗),并最小化
MSE損失 - 在降低探索率的同時在多個
episode上重復上述步驟
3. 實現深度 Q 學習模型進行 CartPole 游戲
根據以上策略,使用 PyTorch 編寫深度 Q 學習模型,進行 CartPole 游戲。
(1) 導入相關庫:
import gym
import numpy as np
import cv2
from collections import deque
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import random
from collections import namedtuple, deque
import torch
import torch.nn.functional as F
import torch.optim as optim
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
(2) 定義環境:
env = gym.make('CartPole-v1')
(3) 定義網絡架構:
class DQNetwork(nn.Module):def __init__(self, state_size, action_size):super(DQNetwork, self).__init__()self.fc1 = nn.Linear(state_size, 24)self.fc2 = nn.Linear(24, 24)self.fc3 = nn.Linear(24, action_size)def forward(self, state): x = F.relu(self.fc1(state))x = F.relu(self.fc2(x))x = self.fc3(x)return x
該架構在兩個隱藏層中僅包含 24 個單元,輸出層包含與可能動作數相同的單元。
(4) 定義 Agent 類。
定義 __init__ 方法,其中包含各種參數、網絡的定義:
class Agent():def __init__(self, state_size, action_size):self.state_size = state_sizeself.action_size = action_sizeself.seed = random.seed(0)## hyperparametersself.buffer_size = 2000self.batch_size = 64self.gamma = 0.99self.lr = 0.0025self.update_every = 4 # Q-Networkself.local = DQNetwork(state_size, action_size).to(device)self.optimizer = optim.Adam(self.local.parameters(), lr=self.lr)# Replay memoryself.memory = deque(maxlen=self.buffer_size) self.experience = namedtuple("Experience", field_names=["state", "action", "reward", "next_state", "done"])self.t_step = 0
定義 step 函數,該函數從內存中獲取數據并通過調用 learn 函數將其擬合到模型中:
def step(self, state, action, reward, next_state, done):# Save experience in replay memoryself.memory.append(self.experience(state, action, reward, next_state, done)) # Learn every update_every time steps.self.t_step = (self.t_step + 1) % self.update_everyif self.t_step == 0:# If enough samples are available in memory, get random subset and learnif len(self.memory) > self.batch_size:experiences = self.sample_experiences()self.learn(experiences, self.gamma)
定義 act 函數,該函數在給定狀態的情況下預測動作:
def act(self, state, eps=0.):# Epsilon-greedy action selectionif random.random() > eps:state = torch.from_numpy(state).float().unsqueeze(0).to(device)self.local.eval()with torch.no_grad():action_values = self.local(state)self.local.train()return np.argmax(action_values.cpu().data.numpy())else:return random.choice(np.arange(self.action_size))
在以上代碼中,我們在確定要采取的行動時使用探索-利用策略。
定義 learn 函數用于擬合模型,使其在給定狀態時預測動作值:
def learn(self, experiences, gamma): states, actions, rewards, next_states, dones = experiences# Get expected Q values from local modelQ_expected = self.local(states).gather(1, actions)# Get max predicted Q values (for next states) from local modelQ_targets_next = self.local(next_states).detach().max(1)[0].unsqueeze(1)# Compute Q targets for current states Q_targets = rewards + (gamma * Q_targets_next * (1 - dones))# Compute lossloss = F.mse_loss(Q_expected, Q_targets)# Minimize the lossself.optimizer.zero_grad()loss.backward()self.optimizer.step()
在以上代碼中,獲取采樣經驗并預測我們執行的動作的 Q 值。此外,由于我們已經知道下一個狀態,可以預測下一個狀態下動作的最佳 Q 值。因此,我們可以得到與在給定狀態下采取的動作相對應的目標值。最后,計算在當前狀態下采取的動作的 Q 值的期望值 (Q_targets) 和預測值 (Q_expected) 之間的誤差。
定義 sample_experiences 函數以便從內存中采樣經驗:
def sample_experiences(self):experiences = random.sample(self.memory, k=self.batch_size) states = torch.from_numpy(np.vstack([e.state for e in experiences if e is not None])).float().to(device)actions = torch.from_numpy(np.vstack([e.action for e in experiences if e is not None])).long().to(device)rewards = torch.from_numpy(np.vstack([e.reward for e in experiences if e is not None])).float().to(device)next_states = torch.from_numpy(np.vstack([e.next_state for e in experiences if e is not None])).float().to(device)dones = torch.from_numpy(np.vstack([e.done for e in experiences if e is not None]).astype(np.uint8)).float().to(device) return (states, actions, rewards, next_states, dones)
(5) 定義智能體對象:
agent = Agent(env.observation_space.shape[0], env.action_space.n)
(6) 訓練模型。
初始化列表:
scores = [] # list containing scores from each episode
scores_window = deque(maxlen=100) # last 100 scores
n_episodes=5000
max_t=5000
eps_start=1.0
eps_end=0.001
eps_decay=0.9995
eps = eps_start
在每個 episode 中重置環境并獲取狀態的形狀,此外,整形狀態維度形狀,以便可以將其傳遞給網絡:
for i_episode in range(1, n_episodes+1):state = env.reset()state_size = env.observation_space.shape[0]state = np.reshape(state, [1, state_size])score = 0
循環通過 max_t 個時間步,確定要執行的動作,并使用 step 方法執行,使用 np.reshape 整形狀態張量,并將整形后的狀態傳遞給神經網絡:
for i in range(max_t):action = agent.act(state, eps)next_state, reward, done, _ = env.step(action)next_state = np.reshape(next_state, [1, state_size])
通過指定 agent.step 在當前狀態之上擬合模型,并將狀態重置為下一個狀態,以便在下一次迭代中使用。
如果前 10 步的得分平均值大于 450,則存儲相關數據并停止訓練:
reward = reward if not done or score == 499 else -10agent.step(state, action, reward, next_state, done)state = next_statescore += rewardif done:break scores_window.append(score) # save most recent score scores.append(score) # save most recent scoreeps = max(eps_end, eps_decay*eps) # decrease epsilonprint('\rEpisode {}\tReward {} \tAverage Score: {:.2f} \tEpsilon: {}'.format(i_episode,score,np.mean(scores_window), eps), end="")if i_episode % 100 == 0:print('\rEpisode {}\tAverage Score: {:.2f} \tEpsilon: {}'.format(i_episode, np.mean(scores_window), eps))if i_episode>10 and np.mean(scores[-10:])>450:break
"""
Episode 100 Average Score: 12.65 ge Epsilon: 0.951217530242334.9512175302423344
...
Episode 2700 Average Score: 116.56 e Epsilon: 0.259152752655221145915275265522114
Episode 2712 Reward 500.0 Average Score: 159.01 Epsilon: 0.2576021050410192
"""
(7) 繪制隨著 episode 的增加的分數變化情況如下:
import matplotlib.pyplot as plt
plt.plot(scores)
plt.title('Scores over increasing episodes')
plt.show()
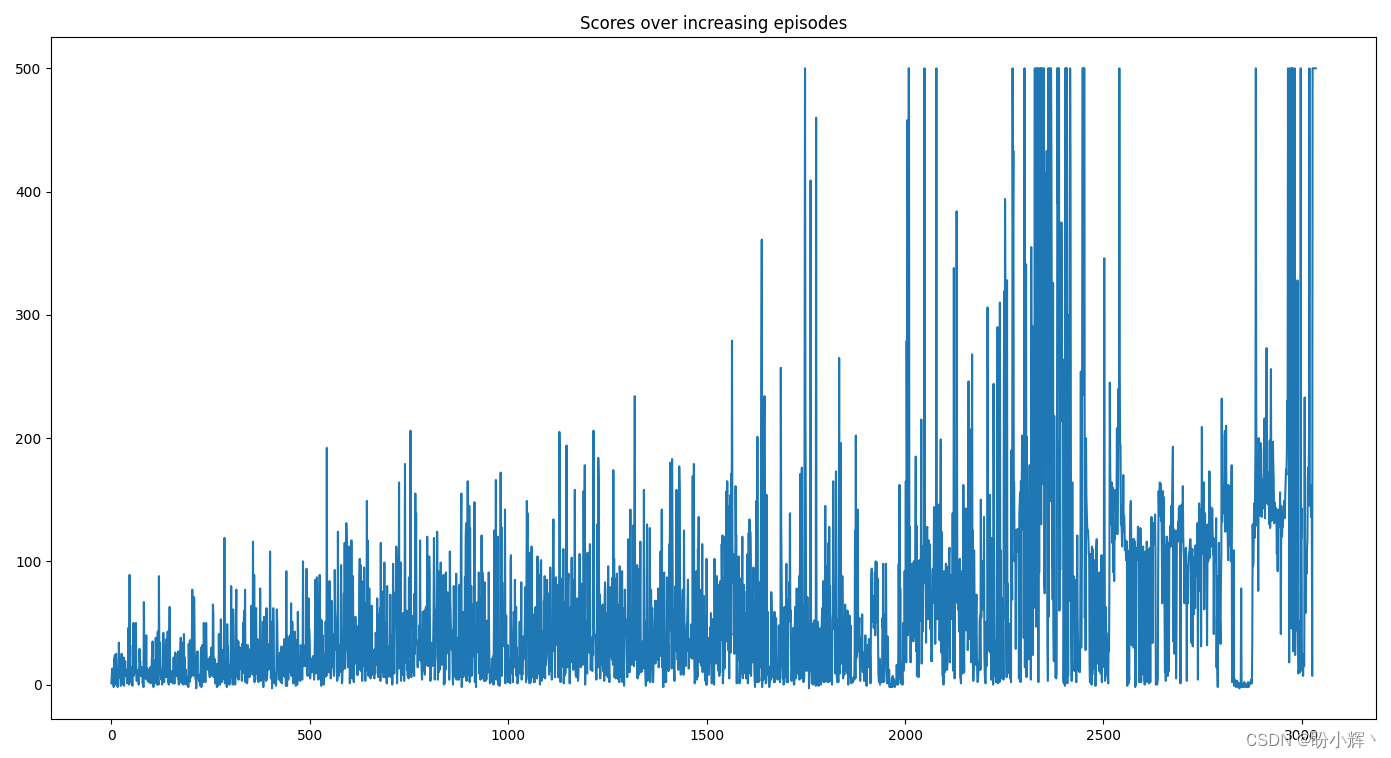
從上圖中可以看出,在第 2000 個 episode 之后,該模型在進行 CartPole 游戲時能夠獲得較高分。
小結
深度 Q 學習是一種結合了深度學習和強化學習的方法,通過深度神經網絡逼近 Q 值函數,在解決大規模、連續狀態空間問題方面具有優勢,并在多個領域展示了強大的學習和決策能力。在本節中,介紹了深度 Q 學習的基本概念,并學習了如何使用 PyTorch 實現深度 Q 學習進行 CartPole 游戲。
系列鏈接
PyTorch深度學習實戰(1)——神經網絡與模型訓練過程詳解
PyTorch深度學習實戰(2)——PyTorch基礎
PyTorch深度學習實戰(3)——使用PyTorch構建神經網絡
PyTorch深度學習實戰(4)——常用激活函數和損失函數詳解
PyTorch深度學習實戰(5)——計算機視覺基礎
PyTorch深度學習實戰(6)——神經網絡性能優化技術
PyTorch深度學習實戰(7)——批大小對神經網絡訓練的影響
PyTorch深度學習實戰(8)——批歸一化
PyTorch深度學習實戰(9)——學習率優化
PyTorch深度學習實戰(10)——過擬合及其解決方法
PyTorch深度學習實戰(11)——卷積神經網絡
PyTorch深度學習實戰(12)——數據增強
PyTorch深度學習實戰(13)——可視化神經網絡中間層輸出
PyTorch深度學習實戰(14)——類激活圖
PyTorch深度學習實戰(15)——遷移學習
PyTorch深度學習實戰(16)——面部關鍵點檢測
PyTorch深度學習實戰(17)——多任務學習
PyTorch深度學習實戰(18)——目標檢測基礎
PyTorch深度學習實戰(19)——從零開始實現R-CNN目標檢測
PyTorch深度學習實戰(20)——從零開始實現Fast R-CNN目標檢測
PyTorch深度學習實戰(21)——從零開始實現Faster R-CNN目標檢測
PyTorch深度學習實戰(22)——從零開始實現YOLO目標檢測
PyTorch深度學習實戰(23)——從零開始實現SSD目標檢測
PyTorch深度學習實戰(24)——使用U-Net架構進行圖像分割
PyTorch深度學習實戰(25)——從零開始實現Mask R-CNN實例分割
PyTorch深度學習實戰(26)——多對象實例分割
PyTorch深度學習實戰(27)——自編碼器(Autoencoder)
PyTorch深度學習實戰(28)——卷積自編碼器(Convolutional Autoencoder)
PyTorch深度學習實戰(29)——變分自編碼器(Variational Autoencoder, VAE)
PyTorch深度學習實戰(30)——對抗攻擊(Adversarial Attack)
PyTorch深度學習實戰(31)——神經風格遷移
PyTorch深度學習實戰(32)——Deepfakes
PyTorch深度學習實戰(33)——生成對抗網絡(Generative Adversarial Network, GAN)
PyTorch深度學習實戰(34)——DCGAN詳解與實現
PyTorch深度學習實戰(35)——條件生成對抗網絡(Conditional Generative Adversarial Network, CGAN)
PyTorch深度學習實戰(36)——Pix2Pix詳解與實現
PyTorch深度學習實戰(37)——CycleGAN詳解與實現
PyTorch深度學習實戰(38)——StyleGAN詳解與實現
PyTorch深度學習實戰(39)——小樣本學習(Few-shot Learning)
PyTorch深度學習實戰(40)——零樣本學習(Zero-Shot Learning)
PyTorch深度學習實戰(41)——循環神經網絡與長短期記憶網絡
PyTorch深度學習實戰(42)——圖像字幕生成
PyTorch深度學習實戰(43)——手寫文本識別
PyTorch深度學習實戰(44)——基于 DETR 實現目標檢測
PyTorch深度學習實戰(45)——強化學習

在3GPP系統中的增強支持(十四)-無人機操控關鍵績效指標(KPI)框架)

:優化性能并為應用程序添加狀態)
策略模式)

)
)






開題報告)


 函數)

