通過一個例子來引出卡爾曼濾波的狀態更新方程;
這里系統狀態是金條的重量;
為了估計系統的狀態,我們可以多次測量金條的重量,然后求平均值;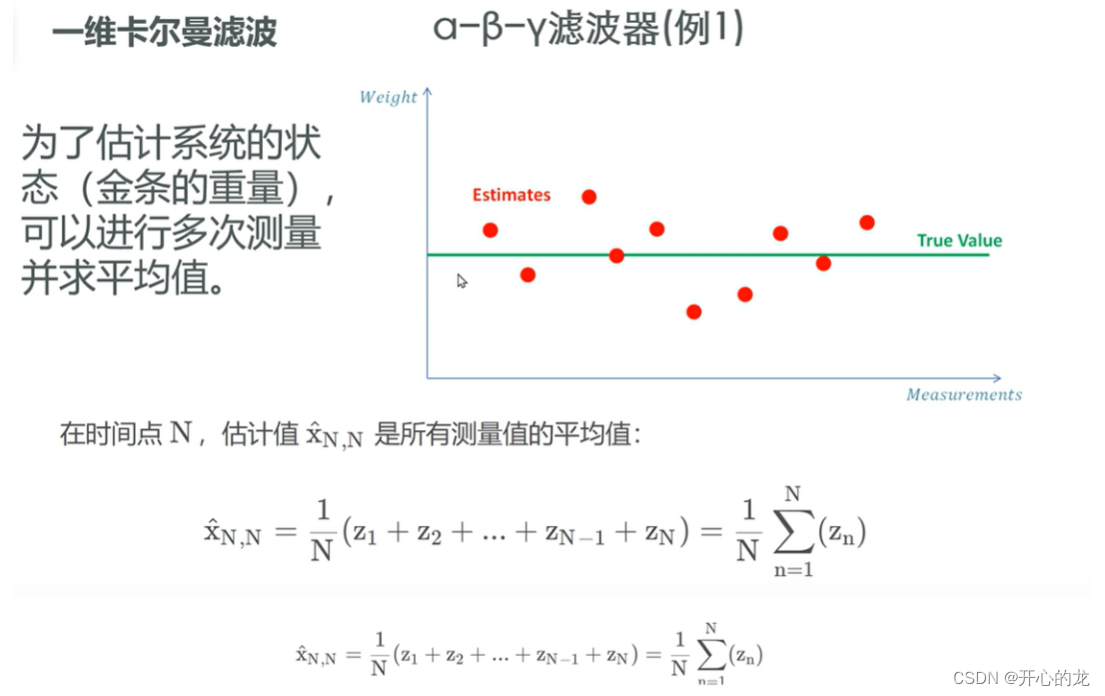
?其中估計值是所有測量值的平均值;
?
由于我們使用的是靜態模型(金條的重量是不會在短時間內發生改變的),所以第N次的估計值和N+1次的估計值相等,即

?
 ?
?
具體的物理意義:
1.預測重量的調整:表示測量值Zn和先驗估計值(測出第N-1次后,對第N次的估計)之間的差異,稱為殘差或者創新,這個差異代表了當前的測量值和先前預測的偏差;

加權平均:通過乘以權重因子,濾波器調整對這個差異的響應,較大的權重因子,表示更信任當前測量值,較小的權重因子表示更信任先前的預測;
更新后的估計位置:通過將加權的殘值添加到預測重量,得到更新的后的估計重量,這意味著新的估計重量是預測重量和測量重量之間的加權平均,更加接近實際重量;
其中1/N隨著測量次數越來越小,意味著開始時沒有足夠的重量信息,估算值主要依靠測量值,但是隨著次數越來越多,每次測量的值在估計過程中占比也越來越少,隨著迭代次數足夠多,新的測量值對估計值的影響可以忽略不記;??
在做第一次測量之前,可以通過看金條上刻的數字(或粗略估計)得到金條的重量,著稱為初始猜測(Initial Guess),它將是我們的第一個估計;
這個估計并不會影響我們后面的結果,隨著測量次數逐漸增大,最后估計的結果都會趨于真實值,這就是濾波器的厲害之處;
在卡爾曼濾波器中1/N這個權重因子就是卡爾曼增益 ;
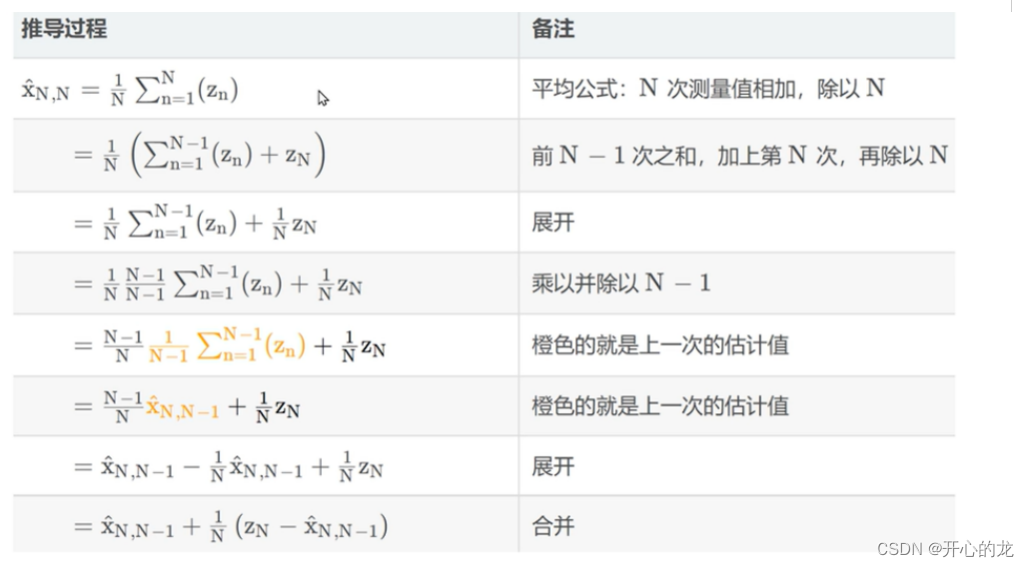
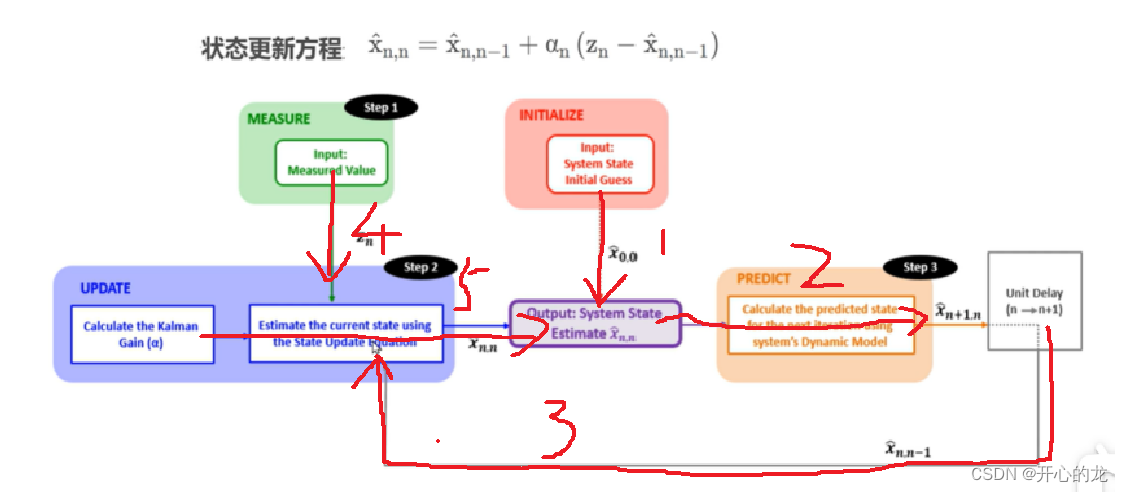
這個方程的形式就是狀態更新方程,如下:

 ?
?
狀態更新方程只是卡爾曼濾波的一個方程,卡爾曼濾波是一個有機整體,具體流程如下:

流程并不是按照Step1.2.3進行的,具體如圖所示:
 ?
?
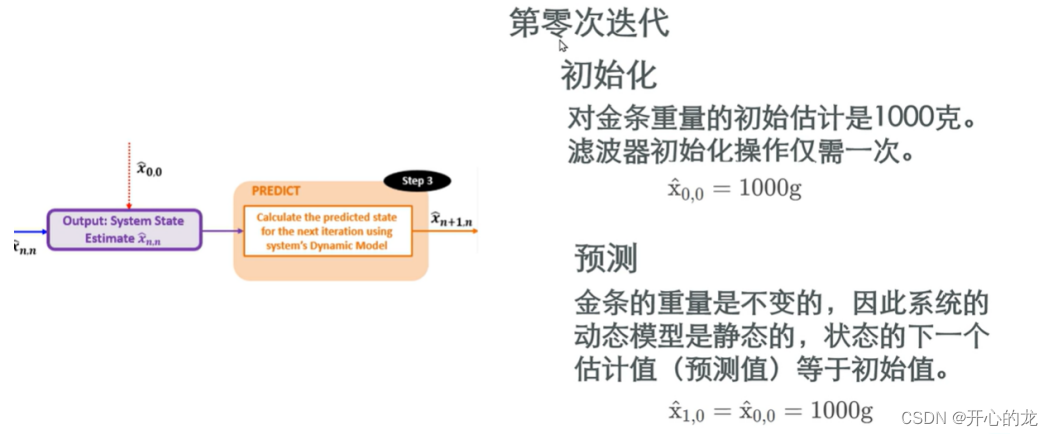
首先第一步1:進行初始化,我們根據各方面因素,輸入一個估計值X(0,0)(主觀定義);
第二步2:進行預測(狀態外推方程),但是由于我們目前使用的是靜態模型,所以預測前后結果保持不變,得到輸出估計值為X(1,0)(表示先驗估計值,第0次對第一次的估計,其值仍然等于X(0,0));
第三步3:變為下一時刻n->n+1,此時N=1;
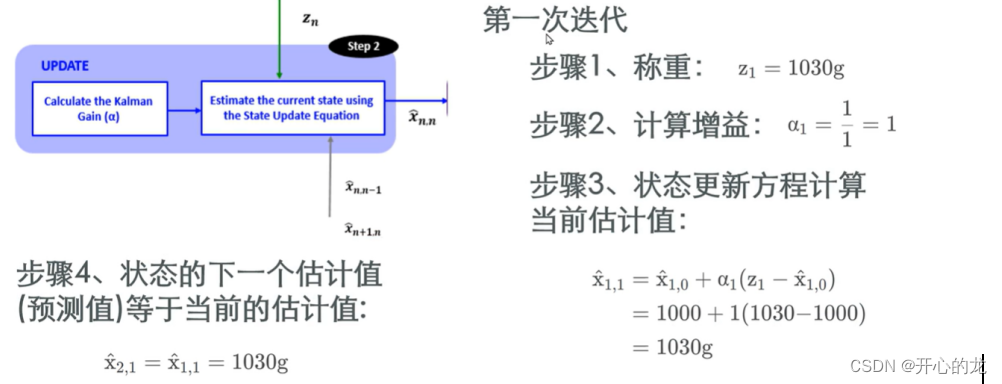
第四步4:進行測量,輸入測量值Z1;
第五步5:根據狀態更新方程,更新數據得到下一時刻的估計值,之后(初始化只進行一次)進行預測,由于我們是靜態模型,所以不需要進行任何預測,值保持不變,循環往復;
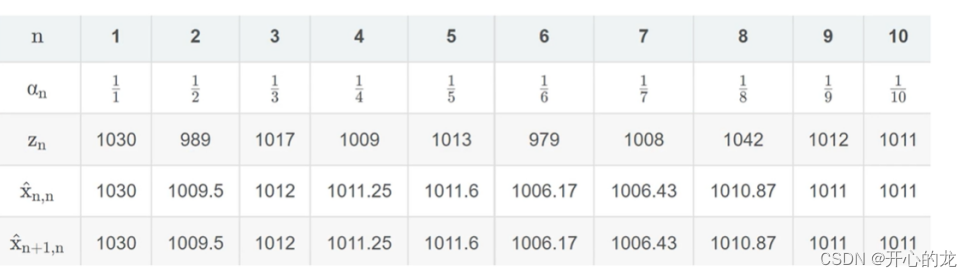
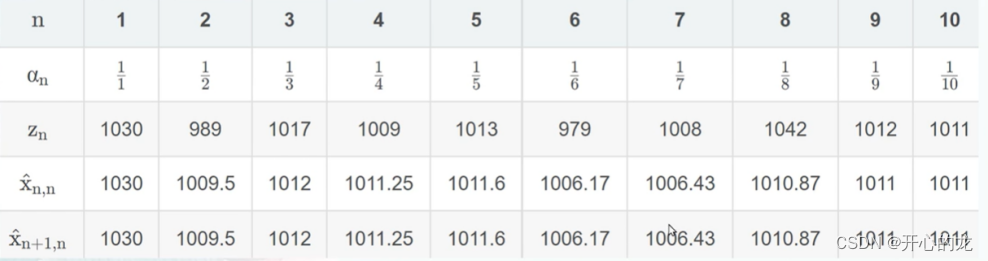
....經過十次后,得到以下結果:
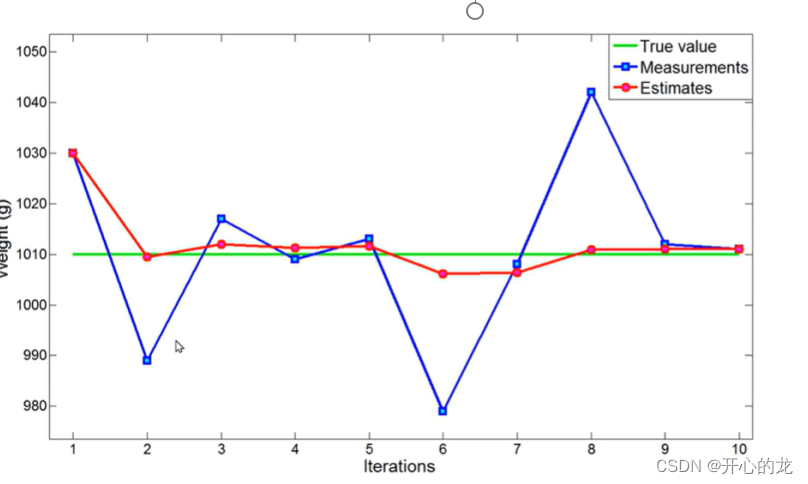
 ?繪制圖像:綠色的線是真實值,藍色的線是測量值,紅色的線是估計值,隨著迭代次數,估計值收斂于真實值;
?繪制圖像:綠色的線是真實值,藍色的線是測量值,紅色的線是估計值,隨著迭代次數,估計值收斂于真實值;
?具體舉例:
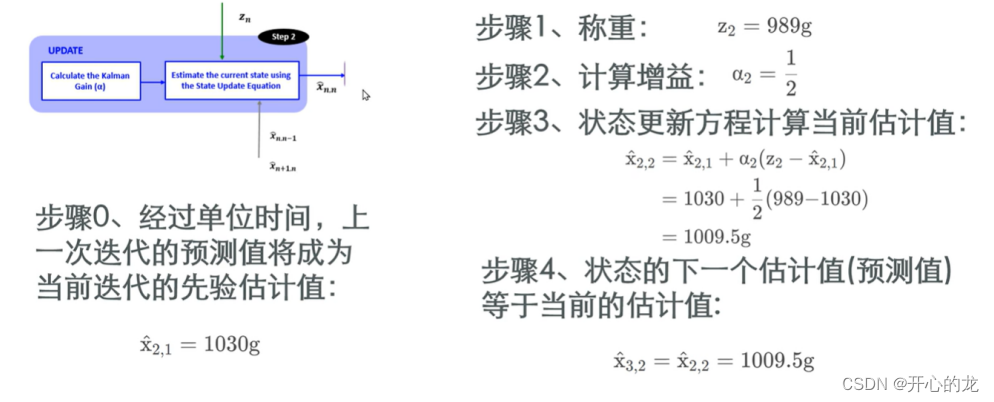
 ?第二次迭代:
?第二次迭代:
第三次迭代:
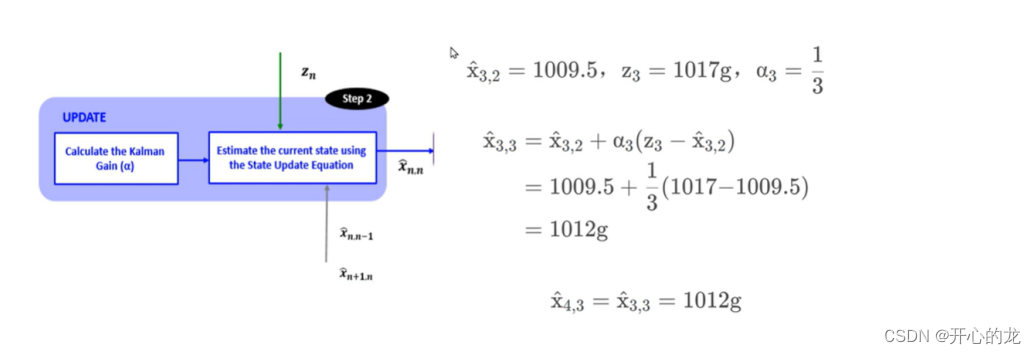 ?增益隨著測量的次數而減小,每一次測量值的影響都比之前前一個測量值小;
?增益隨著測量的次數而減小,每一次測量值的影響都比之前前一個測量值小;
 ?
?
在這個例子中,我們為靜態系統設計了一個簡單的估計算法,并且推導出了卡爾曼濾波的五個方程之一的狀態更新方程。
系統的輸入是上一時刻的先驗估計值和權重因子,輸出是當前時刻的估計值;
表示通過預測值加上殘差(測量值減去預測值)*權重因子得到當前時刻的估計值,更加接近實際重量;
?

)








)

)



)



