簡介
文章為筆記性質
硬件包括
大疆C板
電機調速器C620
DJI3508電機
CAN知識介紹
CAN的概念
CAN是控制器區域網絡(Controller Area?Network)的縮寫。CAN總線是一種適用于工業設備的高性能總線網絡。說白了就是也就是一種通訊方式而已。
把多個設備串在一根線上,再通過一定的協議約束,就能實現最方便的多設備互相通信。
而不用每個設備都兩兩之間有連線,大大節省了成本和布線復雜程度。
其次CAN的可靠性也比較高,采用差分線的形式,具有較強的抗干擾能力和噪聲抑制能力。
CAN總線結構
CAN總線網絡的結構有閉環和開環兩種形式。
閉環
閉環結構的CAN總線網絡,總線兩端各接一個120Ω的終端電阻,兩根信號線形成的回路。這種CAN總線網絡由ISO11898標準定義,是高速、短距離的CAN網絡,通信速率為125kbit/s到1Mbit/s,在1Mbit/s通信速率時,總線長達40m。
開環
開環結構的CAN總線網絡,兩根信號線獨立,各自串聯一個2.2 kΩ的電阻。這中CAN總線網絡由ISO11519-2標準定義,是低速、遠距離的CAN網絡,最高速率為125kbit/s。在40kbit/速率時,總線最長舉例為1000m。
??閉環結構適用于節點數量有限的小型網絡、簡單性要求高、可靠性要求高的場景。開環結構適用于大型網絡,擴展性要求高,故障隔離要求高的場景。
一般情況下,(平時驅動個電機、進行簡單的通信),我們只用得到 高速CAN 也就是 閉環CAN
所以這里也就主要說一說高速CAN(閉環CAN,1Mbit/s)
以下部分簡稱之為CAN
下圖是CAN的結構示意圖:
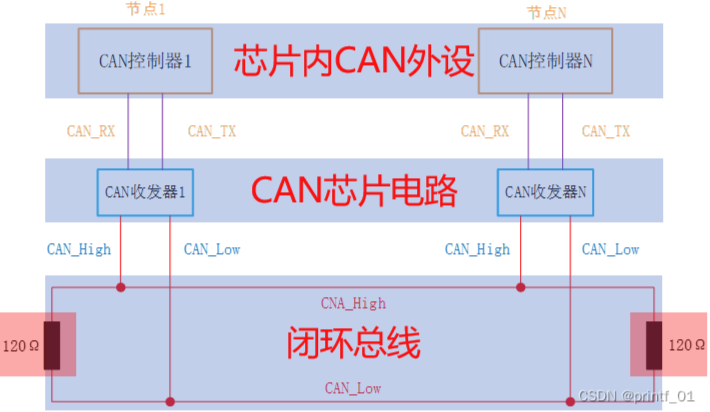
CAN總線上只有兩根信號線,即CANH和CANL,沒有時鐘同步信號。
所以CAN是一種異步通信方式,與UART的異步通信方式類似,而SPI、I2C是以時鐘信號同步的同步通信方式。
其中的120Ω電阻被稱為終端電阻,作用是:阻抗匹配、減少信號反射、增強抗干擾等。
CAN的物理層
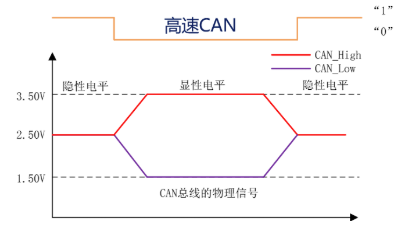
? ??????CAN總線的兩根信號線通常采用雙絞線,傳輸的是差分信號,通過兩根信號線的電壓差CANH - CANL來表示CAN的總線電平。
????????以差分信號傳輸信號具有抗干擾強,能有效抑制外部電子干擾等優點,這也是CAN總線在工業上應用廣泛的一個原因。
??兩根信號線的電壓差CANH-CANL表示CAN總線的電平,與傳輸的邏輯信號1和邏輯0對應。對于邏輯1的稱為隱形(Ressive)電平,對應與邏輯0的稱為顯性(Dominant)電平。
到這里應該對CAN有了一定的了解了,那么你也許會問:
單片機只能傳輸電平信號,怎么實現這種操作呢?
所以我們就需要另一個芯片作為CAN收發器 把單片機的高低電平信號轉化為 CAN總線需要的信號
CAN收發器一般是單獨的芯片,并且根據CAN總線的結構不同,需要使用不同的CAN收發器芯片,常見的CAN收發器芯片有TJA1050,TJA1042,SIT1050T,SIT1050T支持高速CAN,傳輸速率可達1Mbps。
我們的C板上已經有了CAN收發器芯片,所以直接用就可以。
CAN的數據傳輸特點
(1)CAN總線上的節點既可以發送數據又可以接收數據,沒有主從之分。但是在同一個時刻,只能有一個節點在發送數據,其他節點只能接收數據。
(2) CAN總線上的節點沒有地址的概念。CAN總線上的數據是以幀為單位傳輸的。,幀又分為數據幀、遙控幀等多種幀類型,幀包含需要傳輸的數據或控制信息。
(3)CAN總線具有“線與”的特性,也就是當有兩個字節同時向總線發送信號時,一個發送顯性電平(邏輯0),另一個發送隱形電平(邏輯1),總線呈現為顯性電平,這個特性被用于總線仲裁,也就是哪個節點優先占用總線進行發送操作。
????????當沒有數據發送時,終端電阻使總線保持在隱性電平。
(4)每個幀也有一個標識符(Indentifier,以下簡稱ID)。ID不是地址,它表示數據傳輸的類型,也可以用于總線仲裁時確定優先級。例如,在汽車的CAN總線上,假設用于碰撞檢測的節點輸出數據幀的ID為01,車內溫度檢測節點發送數據幀的ID為05等。
(5) 每個CAN節點都接收數據,但是可以對接收的幀ID進行過濾。只有節點需要的數據才會被接收并進一步處理,不需要的數據會被自動舍棄。例如,假設安全氣囊控制器只接收碰撞檢測節點發出的ID為01的幀,這種ID的過濾是由硬件完成的,以便安全氣囊控制器在發生碰撞時能及時響應。
(6)CAN總線通信是半雙工的,即總線不能同時發送和接收。在多個節點競爭總線進行發送時,通過ID的優先級進行仲裁,競爭勝出的節點繼續發送,競爭失敗的節點立刻轉為接送狀態。
(7)CAN總線沒有用于同步的時鐘信號,所以需要規定CAN總線通信的波特率,所有節點都必須使用相同的波特率進行通訊。
CAN協議層
CAN總線以“幀”形式進行通信。
CAN協議定義了5種類型的幀:數據幀、遙控幀、錯誤幀、過載幀、間隔幀,其中數據幀最為常用。

??其中,數據幀和遙控幀有ID,并且有標準格式和拓展格式兩種格式,標準格式的ID是11位,拓展格式的ID是29位,下面僅詳細介紹數據幀的結構,其他幀的結構可參考相關資料。
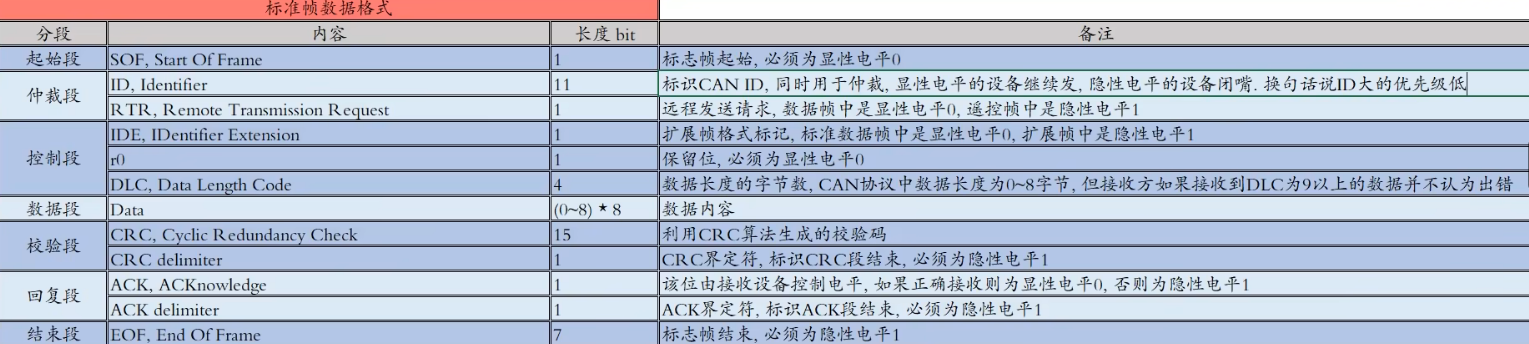
數據幀可以分為以下幾段。
??(1)幀起始(Start Of Frame,SOF)。幀起始只有一個位,是一個顯性電平(邏輯0),表示一個幀的開始。
??(2)仲裁段(Arbitration Field)。仲裁段包括11位的ID和RTR位,共12位。多個節點競爭總線發送數據時,根據仲裁段的數據決定哪個節點優先占用總線。哪個ID先出現顯性電平(邏輯0),對應的節點就占用總線。所以,ID數值越小的優先級更高(CAN總線使用的是基于標識符的仲裁機制,標識符中的低位具有較高的權重,因此ID數值小的節點的標識符具有更高的優先級)。如果兩個節點發送數據幀的ID相同,再根據仲裁段最后的RTR位進行裁決。
??RTR(Remote Transmit Request)是遠程傳輸請求位,RTR位用于區分數據幀和遙控幀。數據幀的RTR位是顯性電平(邏輯0),遙控幀的RTR位是隱形電平(邏輯1)。所以,具有相同ID的數據幀和遙控幀競爭總線時,數據幀優先級更高。
??(3)控制段。控制段包括IDE位、RB0位和4位的DLC,共6位。
IDE是標識符擴展位(Identifier Extension Bit),用于表示幀是擴展格式還是標準格式。標準格式的IDE是顯性電平(邏輯0),拓展格式幀的IDE是隱形電平(邏輯1)。
??RB0是保留位,默認為顯性電平。
??DLC是4個位的數據長度編碼(Data Length Code),編碼數值為0到8,表示后面數據段的字節,遙控幀的DLC編碼數值為0,因為遙控幀不傳輸數據。
??(4)數據段。數據段里面是數據幀需要傳輸的數據,可以是0到8字節,數據的字節個數由DLC編碼確定。遙控幀沒有數據段。
??(5)CRC段。檢查幀的傳輸錯誤的段。CRC共16位,其中前15位是CRC校驗碼,最后一位總是隱形電平,是CRC段的界定符(Delimiter)。
??(6)ACK段。ACK段包括一個ACK位(Acknowledge Bit)和一個ACK段界定符。發送節點發送的ACK位是隱形電平,接收節點接收的ACK位是顯性電平。
??(7)幀結束(End Of Frame,EOF)。幀結束是幀結束段,由7個隱性位表示EOF。
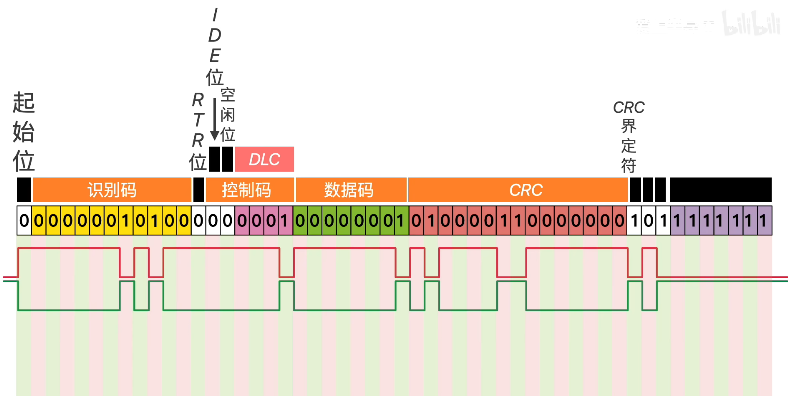
??數據幀或遙控幀結束后,后面一般是幀空間或過載幀,用于分隔開數據幀和遙控幀。
具體參考下圖:
到這里基本知識已經了解的差不多了。
更詳細的內容請看中科大RM的培訓視頻。
接下來看CubeMX配置和相應代碼
CubeMX配置
在SYS把DEBUG改成sw
在RCC開啟外部時鐘
配置時鐘樹
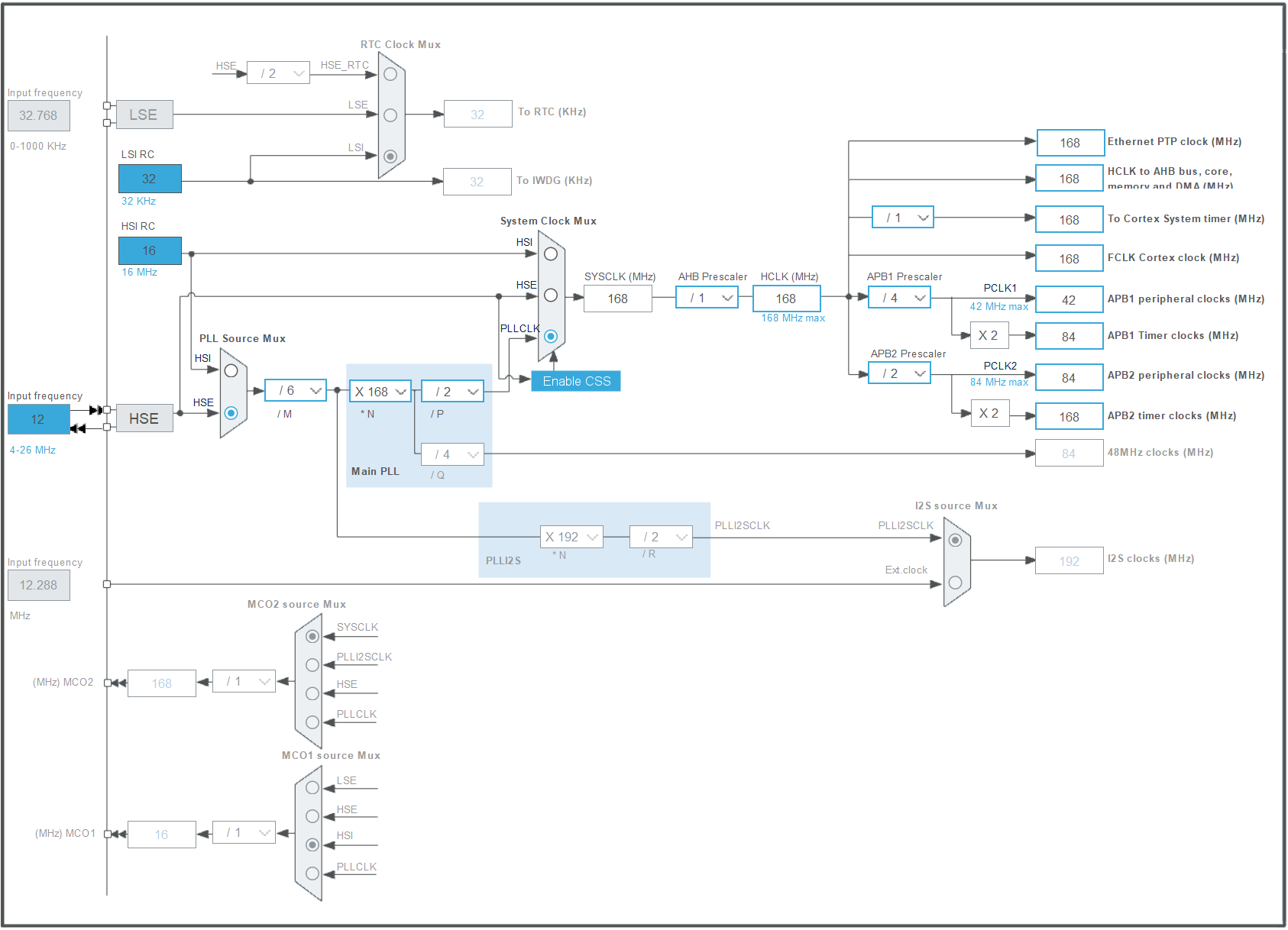
這里需要尤其關注 input frequence 一定一定要是12M 因為C板的硬件給的就是12M晶振,如果你這里配錯了 接下來的到板子上的時鐘就亂了 就不是你想要的頻率了。
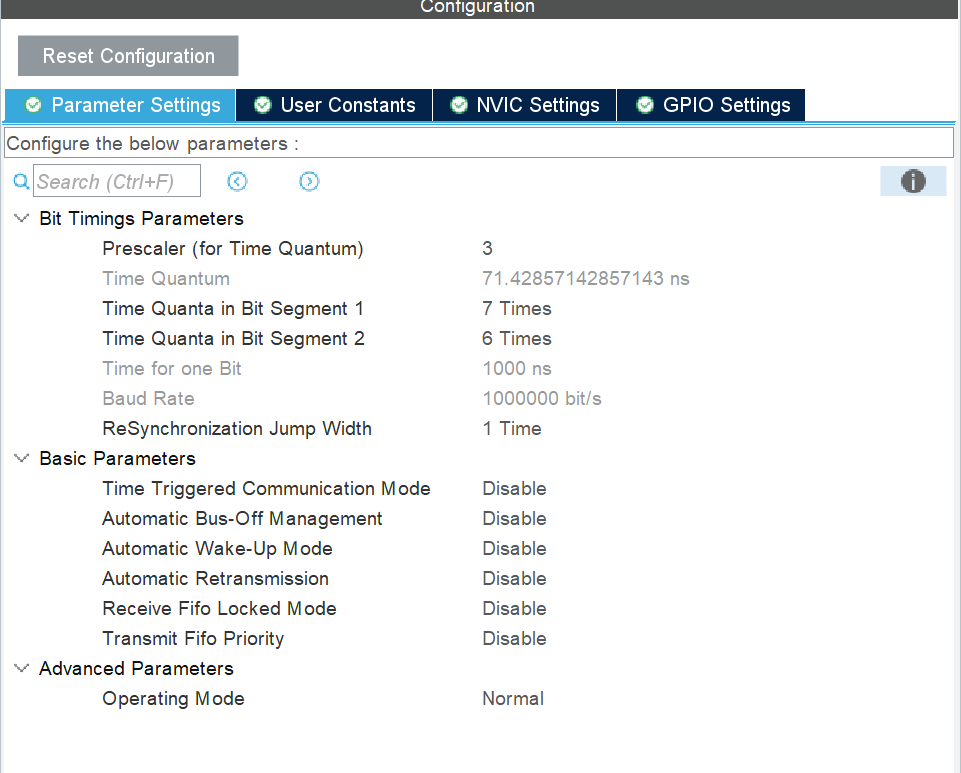
然后是開啟CAN1
把波特率調整為1M
Normal模式
開NVIC
OK到這就配置完成。
代碼
本代碼基于中科大RM電控培訓的開源代碼改編而來
包括接收和發送
一些宏定義和聲明
一些必要的宏定義以及聲明// 濾波器編號
#define CAN_FILTER(x) ((x) << 3)// 接收隊列
#define CAN_FIFO_0 (0 << 2)
#define CAN_FIFO_1 (1 << 2)// 標準幀或擴展幀
#define CAN_STDID (0 << 1)
#define CAN_EXTID (1 << 1)// 數據幀或遙控幀
#define CAN_DATA_TYPE 0
#define CAN_REMOTE_TYPE 1/*** @brief CAN接收的信息結構體**/
typedef struct
{CAN_RxHeaderTypeDef Header;uint8_t Data[8];
} Struct_CAN_Rx_Buffer;/*** @brief CAN通信接收回調函數數據類型**/
typedef void (*CAN_Call_Back)(Struct_CAN_Rx_Buffer *);/*** @brief CAN通信處理結構體**/
typedef struct
{CAN_HandleTypeDef *CAN_Handler;Struct_CAN_Rx_Buffer Rx_Buffer;CAN_Call_Back Callback_Function;
} Struct_CAN_Manage_Object;// CAN通信發送緩沖區
uint8_t CAN1_0x0a0_Tx_Data[8];
uint8_t CAN1_0x1ff_Tx_Data[8];
uint8_t CAN1_0x200_Tx_Data[8];
uint8_t CAN1_0x2ff_Tx_Data[8];
uint8_t CAN1_0xxf1_Tx_Data[8];
uint8_t CAN1_0xxf2_Tx_Data[8];
uint8_t CAN1_0xxf3_Tx_Data[8];
uint8_t CAN1_0xxf4_Tx_Data[8];
uint8_t CAN1_0xxf5_Tx_Data[8];
uint8_t CAN1_0xxf6_Tx_Data[8];
uint8_t CAN1_0xxf7_Tx_Data[8];
uint8_t CAN1_0xxf8_Tx_Data[8];這里創建一個兩個CAN的結構體用于接收數據
Struct_CAN_Manage_Object CAN1_Manage_Object = {0};
Struct_CAN_Manage_Object CAN2_Manage_Object = {0};
CAN過濾器
/*** @brief 配置CAN的過濾器** @param hcan CAN編號* @param Object_Para 篩選器編號0-27 | FIFOx | ID類型 | 幀類型* @param ID 驗證碼* @param Mask_ID 屏蔽碼(0x3ff, 0x1fffffff)*/
void can_filter_mask_config(CAN_HandleTypeDef *hcan, uint8_t Object_Para, uint32_t ID, uint32_t Mask_ID)
{// 檢測傳參是否正確assert_param(hcan != NULL);// CAN過濾器初始化結構體CAN_FilterTypeDef can_filter_init_structure;// 濾波器序號, 0-27, 共28個濾波器can_filter_init_structure.FilterBank = Object_Para >> 3;// 濾波器模式,設置ID掩碼模式can_filter_init_structure.FilterMode = CAN_FILTERMODE_IDMASK;if ((Object_Para & 0x02)){// 29位 拓展幀// 32位濾波can_filter_init_structure.FilterScale = CAN_FILTERSCALE_32BIT;// 驗證碼 高16bitcan_filter_init_structure.FilterIdHigh = (ID << 3) >> 16;// 驗證碼 低16bitcan_filter_init_structure.FilterIdLow = ID << 3 | (Object_Para & 0x03) << 1;// 屏蔽碼 高16bitcan_filter_init_structure.FilterMaskIdHigh = (Mask_ID << 3) >> 16;// 屏蔽碼 低16bitcan_filter_init_structure.FilterMaskIdLow = Mask_ID << 3 | (0x03) << 1;}else{// 11位 標準幀// 32位濾波can_filter_init_structure.FilterScale = CAN_FILTERSCALE_16BIT;// 標準幀驗證碼 高16bit不啟用can_filter_init_structure.FilterIdHigh = 0x0000;// 驗證碼 低16bitcan_filter_init_structure.FilterIdLow = ID << 5 | (Object_Para & 0x02) << 4;// 標準幀屏蔽碼 高16bit不啟用can_filter_init_structure.FilterMaskIdHigh = 0x0000;// 屏蔽碼 低16bitcan_filter_init_structure.FilterMaskIdLow = (Mask_ID << 5) | 0x01 << 4;}// 濾波器綁定FIFO0或FIFO1can_filter_init_structure.FilterFIFOAssignment = (Object_Para >> 2) & 0x01;// 從機模式選擇開始單元 , 前14個在CAN1, 后14個在CAN2can_filter_init_structure.SlaveStartFilterBank = 14;// 使能濾波器can_filter_init_structure.FilterActivation = ENABLE;// 過濾器配置if (HAL_CAN_ConfigFilter(hcan, &can_filter_init_structure) != HAL_OK){Error_Handler();}
}
CAN初始化函數
/*** @brief 初始化CAN總線** @param hcan CAN編號* @param Callback_Function 處理回調函數*/
void CAN_Init(CAN_HandleTypeDef *hcan, CAN_Call_Back Callback_Function)
{if (hcan->Instance == CAN1){CAN1_Manage_Object.CAN_Handler = hcan;CAN1_Manage_Object.Callback_Function = Callback_Function;// can_filter_mask_config(hcan, CAN_FILTER(0) | CAN_FIFO_0 | CAN_STDID | CAN_DATA_TYPE, 0x200 ,0x7F8); //只接收0x200-0x207// can_filter_mask_config(hcan, CAN_FILTER(1) | CAN_FIFO_1 | CAN_STDID | CAN_DATA_TYPE, 0x200, 0x7F8);
// can_filter_mask_config(hcan, CAN_FILTER(0) | CAN_FIFO_0 | CAN_STDID | CAN_DATA_TYPE, 0x200, 0x7F8);
// can_filter_mask_config(hcan, CAN_FILTER(1) | CAN_FIFO_1 | CAN_STDID | CAN_DATA_TYPE, 0x200, 0x7F8);can_filter_mask_config(hcan, CAN_FILTER(0) | CAN_FIFO_0 | CAN_STDID | CAN_DATA_TYPE, 0, 0); // 只接收can_filter_mask_config(hcan, CAN_FILTER(1) | CAN_FIFO_1 | CAN_STDID | CAN_DATA_TYPE, 0, 0);}else if (hcan->Instance == CAN2){CAN2_Manage_Object.CAN_Handler = hcan;CAN2_Manage_Object.Callback_Function = Callback_Function;can_filter_mask_config(hcan, CAN_FILTER(14) | CAN_FIFO_0 | CAN_STDID | CAN_DATA_TYPE, 0, 0); // 只接收can_filter_mask_config(hcan, CAN_FILTER(15) | CAN_FIFO_1 | CAN_STDID | CAN_DATA_TYPE, 0, 0);}/*離開初始模式*/HAL_CAN_Start(hcan);/*開中斷*/HAL_CAN_ActivateNotification(hcan, CAN_IT_RX_FIFO0_MSG_PENDING); // can 接收fifo 0不為空中斷HAL_CAN_ActivateNotification(hcan, CAN_IT_RX_FIFO1_MSG_PENDING); // can 接收fifo 1不為空中斷
}在這個函數里面利用我們的結構體到HAL的庫的底層,分別初始化了CAN1 CAN2,
然后 用了濾波器 (一定要加上這個濾波器要不然收不到數據的)
這個濾波器里面寫了起始段 仲裁段 控制段 的內容
CAN發送數據函數
/*** @brief 發送數據幀** @param hcan CAN編號* @param ID ID* @param Data 被發送的數據指針* @param Length 長度* @return uint8_t 執行狀態*/
uint8_t CAN_Send_Data(CAN_HandleTypeDef *hcan, uint16_t ID, uint8_t *Data, uint16_t Length)
{CAN_TxHeaderTypeDef tx_header;uint32_t used_mailbox;// 檢測傳參是否正確assert_param(hcan != NULL);tx_header.StdId = ID;tx_header.ExtId = 0;tx_header.IDE = 0;tx_header.RTR = 0;tx_header.DLC = Length;return (HAL_CAN_AddTxMessage(hcan, &tx_header, Data, &used_mailbox));
}CAN報文回調函數
/*** @brief CAN報文回調函數** @param Rx_Buffer CAN接收的信息結構體*/
void CAN_Motor_Call_Back(Struct_CAN_Rx_Buffer *Rx_Buffer)
{uint8_t *Rx_Data = Rx_Buffer->Data;switch (Rx_Buffer->Header.StdId){//3508電機會傳數據回來,之前發送的ID是0x200//所以接收的ID就分別是0x201,0x202,0x203,0x204,0x205,0x206,0x207,0x208//電機的ID是幾對應的就是0x20幾//要注意的是 電機ID1-4對應0x200 ID5-8對應0x1ffcase (0x202):{Rx_Encoder = (Rx_Data[0] << 8) | Rx_Data[1];Rx_Omega = (Rx_Data[2] << 8) | Rx_Data[3];Rx_Torque = (Rx_Data[4] << 8) | Rx_Data[5];Rx_Temperature = Rx_Data[6];}break;}
}HAL庫CAN接收FIFO中斷
/*** @brief HAL庫CAN接收FIFO0中斷** @param hcan CAN編號*/
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{// CAN_RxHeaderTypeDef header;// uint8_t data;// HAL_CAN_GetRxMessage(hcan, CAN_FILTER_FIFO0, &header, &data);//選擇回調函數if (hcan->Instance == CAN1){HAL_CAN_GetRxMessage(hcan, CAN_FILTER_FIFO0, &CAN1_Manage_Object.Rx_Buffer.Header, CAN1_Manage_Object.Rx_Buffer.Data);CAN1_Manage_Object.Callback_Function(&CAN1_Manage_Object.Rx_Buffer);}else if (hcan->Instance == CAN2){HAL_CAN_GetRxMessage(hcan, CAN_FILTER_FIFO0, &CAN2_Manage_Object.Rx_Buffer.Header, CAN2_Manage_Object.Rx_Buffer.Data);CAN2_Manage_Object.Callback_Function(&CAN2_Manage_Object.Rx_Buffer);}}/*** @brief HAL庫CAN接收FIFO1中斷** @param hcan CAN編號*/
void HAL_CAN_RxFifo1MsgPendingCallback(CAN_HandleTypeDef *hcan)
{// 選擇回調函數if (hcan->Instance == CAN1){HAL_CAN_GetRxMessage(hcan, CAN_FILTER_FIFO1, &CAN1_Manage_Object.Rx_Buffer.Header, CAN1_Manage_Object.Rx_Buffer.Data);CAN1_Manage_Object.Callback_Function(&CAN1_Manage_Object.Rx_Buffer);}else if (hcan->Instance == CAN2){HAL_CAN_GetRxMessage(hcan, CAN_FILTER_FIFO1, &CAN2_Manage_Object.Rx_Buffer.Header, CAN2_Manage_Object.Rx_Buffer.Data);CAN2_Manage_Object.Callback_Function(&CAN2_Manage_Object.Rx_Buffer);}
}以上就是所有的偏底層一些的代碼了
接下來我們直接調用就可以了
主函數
#include "main.h"
#include "can.h"
#include "gpio.h"#include "drv_can.h"int16_t torque = 500;/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_CAN1_Init();/* USER CODE BEGIN 2 */CAN_Init(&hcan1, CAN_Motor_Call_Back);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){CAN1_0x200_Tx_Data[2] = (torque >> 8) & 0xFF;CAN1_0x200_Tx_Data[3] = torque & 0xFF;CAN_Send_Data(&hcan1,0x200,CAN1_0x200_Tx_Data,8);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}大疆電機的控速是直接給電流的
他有一個映射的范圍

我們的傳過去的數據是2字節的所以采用
CAN1_0x200_Tx_Data[2] = (torque >> 8) & 0xFF;
CAN1_0x200_Tx_Data[3] = torque & 0xFF;
的方法來寫入。
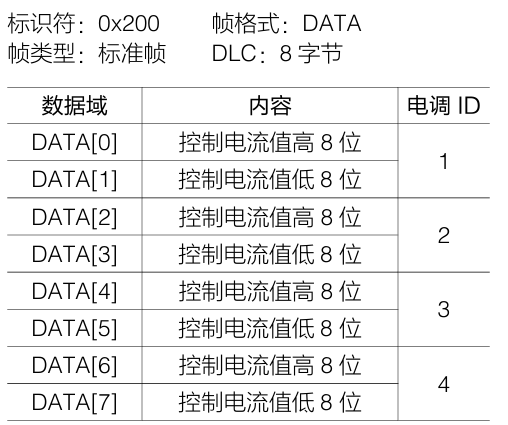
根據3508電機的使用手冊,要根據不同的ID來往不同的位里面寫數據。
總結
總結起來,如果我們不看底層的話,實際上要我們調用的函數其實很少。
就跑一個初始化CAN_Init
把數據寫入相對應的數組內
再用CAN_Send_Data發送出去就好了
然后我們也可以在CAN_Motor_Call_Back這個回調函數中接收電調發來的消息,進行一些其他的處理等等。
本文參考鏈接如下:
中科大RM電控合集
HAL庫STM32常用外設—— CAN通信(一)_stm32 hal can-CSDN博客
趨近于完美的通訊 CAN總線!4分鐘看懂!



》)


![[HFCTF2020]EasyLogin](http://pic.xiahunao.cn/[HFCTF2020]EasyLogin)












