MPPT最大功率點追蹤技術詳解
引言
在可再生能源系統中,最大化能量捕獲效率是核心目標。無論是光伏發電系統還是儲能變流器(PCS),最大功率點追蹤(MPPT) 技術都是實現這一目標的關鍵。本文將深入探討MPPT技術的原理、實現算法及其在工程應用中的實踐要點。
什么是MPPT?
基本概念
MPPT(Maximum Power Point Tracking)是一種通過調節電力電子變換器的工作點,使能源(如光伏電池)始終工作在最大功率輸出狀態的技術。對于光伏系統而言,光伏電池的I-V和P-V曲線呈非線性特性,且隨光照強度、溫度等環境因素變化,最大功率點(MPP)也會相應移動。
PV 電池板的功率輸出取決于若干參數,例如電池板受到的輻照、電池板電壓、電池板溫度等。因此,在影響參數
值發生變化的條件下,功率輸出也在一天之中不斷變化。
下顯示了太陽能電池板的 I-V 曲線和 P-V 曲線。I-V 曲線表示電池板輸出電流與輸出電壓之間的關系。如圖中的 I-V 曲線所示,當端子短接時,電池板電流最大;當端子開路且空載時,電池板電流最小。
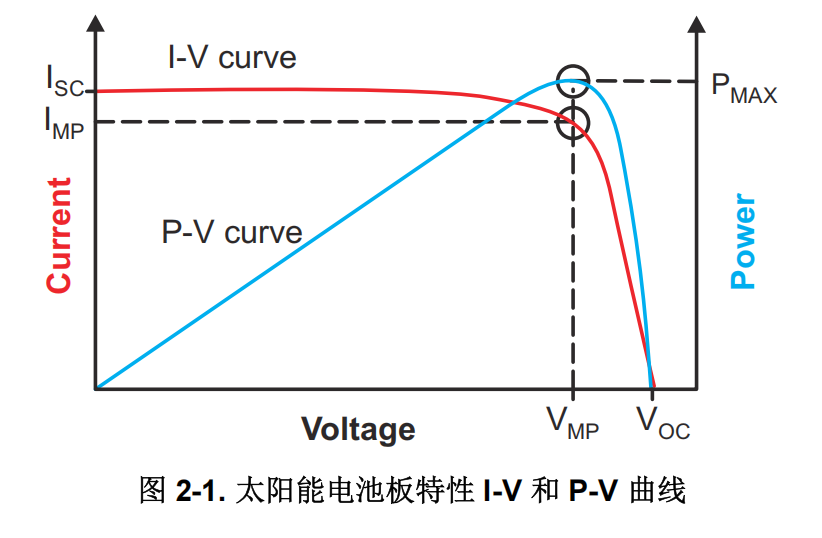
如圖所示,當電池板電壓和電池板電流的乘積達到最大值時,從電池板獲得的最大功率表示為 PMAX。該點指定為最大功率點 (MPP)。
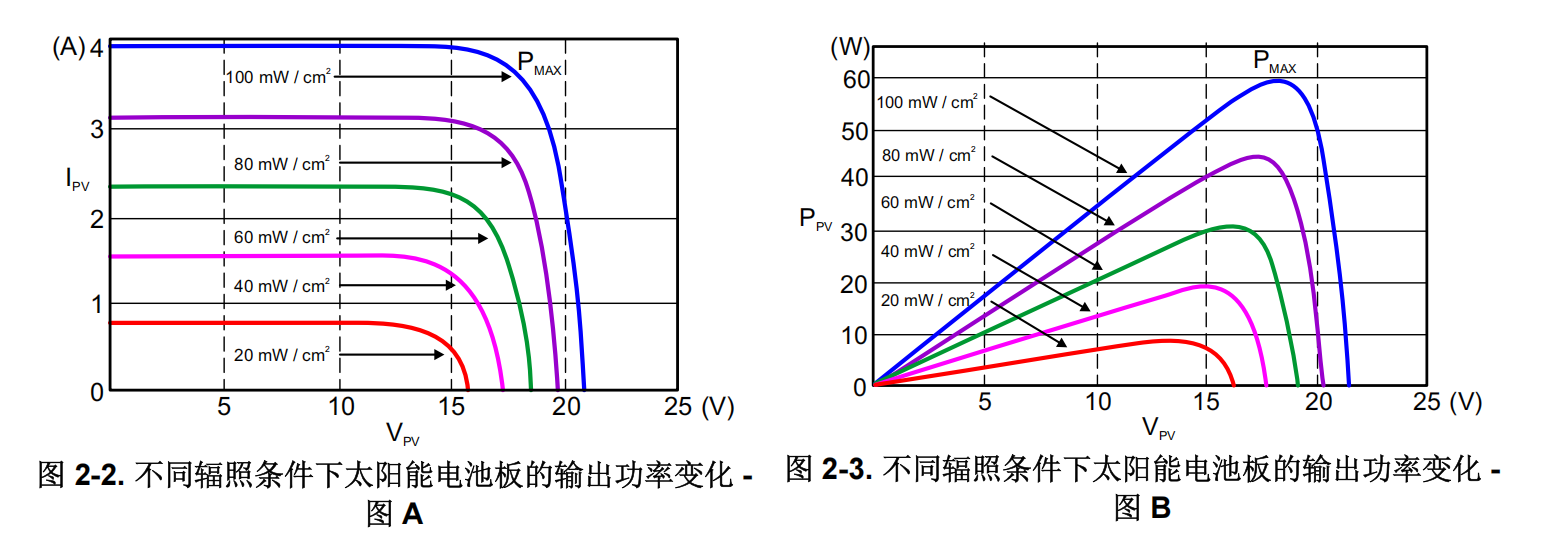
下圖舉例說明各項參數對太陽能電池板輸出功率的影響。這些圖形還顯示了太陽能電池板的功率輸出隨輻照度的變化。在這些圖中可觀察到,太陽能電池板的功率輸出隨輻照度的增加而增加,隨輻照度的減少而減少的情況。還要注意的是,發生 MPP 時的電池板電壓也隨著輻照度的變化而變化。
為什么需要MPPT?
沒有MPPT功能的光伏系統可能工作在非最佳工作點,導致能量損失可達20%-30%。MPPT技術通過實時追蹤不斷變化的最大功率點,可顯著提高系統效率,增加能量產出。
MPPT基本原理
光伏電池的輸出特性可用以下方程描述:
I=Iph?I0[exp?(V+IRsnVt)?1]?V+IRsRsh I = I_{ph} - I_0 \left[ \exp\left(\frac{V + IR_s}{nV_t}\right) - 1 \right] - \frac{V + IR_s}{R_{sh}} I=Iph??I0?[exp(nVt?V+IRs??)?1]?Rsh?V+IRs??
其中,IphI_{ph}Iph?為光生電流,I0I_0I0?為反向飽和電流,RsR_sRs?為串聯電阻,RshR_{sh}Rsh?為并聯電阻,nnn為理想因子,VtV_tVt?為熱電壓。
最大功率點處的數學特性為:
dPdV=0 \frac{dP}{dV} = 0 dVdP?=0
MPPT算法的核心就是通過不斷調整工作點,使系統滿足這一條件。
常用MPPT算法及實現
1. 擾動觀察法(P&O)
原理
P&O算法通過周期性擾動工作點(電壓或占空比),并觀察功率變化方向來決定下一步的擾動方向。
算法流程
- 擾動工作點(增加或減少電壓/占空比)
- 測量功率變化
- 如果功率增加,保持相同擾動方向;如果功率減少,反轉擾動方向
- 重復上述過程
C語言實現代碼-基本擾動觀察法
// 擾動觀察法實現
#define DELTA_D 0.01f // 擾動步長float prev_voltage = 0.0f;
float prev_current = 0.0f;
float prev_power = 0.0f;
float duty_cycle = 0.5f;void mppt_po_algorithm(void) {// 讀取當前電壓和電流float voltage = read_voltage();float current = read_current();float power = voltage * current;// 計算功率變化float delta_p = power - prev_power;float delta_v = voltage - prev_voltage;// 應用P&O邏輯if (delta_p > 0) {duty_cycle += (delta_v > 0) ? DELTA_D : -DELTA_D;} else {duty_cycle += (delta_v > 0) ? -DELTA_D : DELTA_D;}// 限制占空比范圍duty_cycle = (duty_cycle > 0.95f) ? 0.95f : duty_cycle;duty_cycle = (duty_cycle < 0.05f) ? 0.05f : duty_cycle;// 更新PWM并保存狀態set_duty_cycle(duty_cycle);prev_voltage = voltage;prev_current = current;prev_power = power;
}
可復用-擾動觀察法
/*** @brief MPPT(最大功率點跟蹤)算法結構體* * 該結構體包含了MPPT算法所需的所有參數和狀態變量* 實現了擾動觀察法(Perturb and Observe)MPPT算法*/
typedef struct {float32_t Ipv; // 當前光伏電流值float32_t Vpv; // 當前光伏電壓值float32_t MaxI; // 最大允許電流限制float32_t MinI; // 最小允許電流限制float32_t Stepsize; // MPPT步長,用于調整電流參考值float32_t ImppOut; // MPPT輸出的電流參考值// 內部狀態變量float32_t Step; // 當前步長(未使用)float32_t PpvOld; // 上一次的功率值float32_t IpvOld; // 上一次的電流值int16_t mppt_first; // 首次運行標志位int mppt_enable; // MPPT使能標志位
} uinv_dcdc_mppt_t;/*** @brief MPPT算法初始化函數* @param v MPPT結構體指針* * 初始化MPPT算法的狀態變量,設置首次運行標志*/
static void uinv_dcdc_mppt_init(uinv_dcdc_mppt_t *v) {v->mppt_first = 1; // 設置首次運行標志
}/*** @brief MPPT算法主運行函數* @param v MPPT結構體指針* * 實現擾動觀察法MPPT算法:* 1. 計算當前功率點* 2. 比較當前功率與上一次功率* 3. 根據功率變化趨勢調整電流參考值* 4. 確保輸出電流在安全范圍內*/
#pragma FUNC_ALWAYS_INLINE(uinv_dcdc_mppt_run)
static void uinv_dcdc_mppt_run(uinv_dcdc_mppt_t *v) {// 計算當前功率點 P = V × Ifloat32_t P = v->Vpv * v->Ipv;// 檢查MPPT是否使能if(v->mppt_enable) {// 首次運行時的初始化if(v->mppt_first) {v->ImppOut = v->Ipv; // 設置初始電流參考值為當前電流v->PpvOld = P; // 保存當前功率值v->IpvOld = v->Ipv; // 保存當前電流值v->mppt_first = 0; // 清除首次運行標志} else {// 計算電流變化量float32_t deltaI = v->Ipv - v->IpvOld;// 擾動觀察法核心邏輯if(deltaI > 0) { // 如果電流在增加if(P > v->PpvOld) { // 且功率也在增加// 繼續增加電流(向最大功率點方向移動)v->ImppOut = v->Ipv + v->Stepsize;} else { // 但功率在減少// 減少電流(反向移動,避免越過最大功率點)v->ImppOut = v->Ipv - v->Stepsize;}} else { // 如果電流在減少if(P > v->PpvOld) { // 且功率在增加// 繼續減少電流(向最大功率點方向移動)v->ImppOut = v->Ipv - v->Stepsize;} else { // 且功率也在減少// 增加電流(反向移動,避免越過最大功率點)v->ImppOut = v->Ipv + v->Stepsize;}}}}// 電流限幅保護:確保輸出電流在安全范圍內v->ImppOut = (v->ImppOut < v->MinI) ? v->MinI : v->ImppOut; // 下限保護v->ImppOut = (v->ImppOut > v->MaxI) ? v->MaxI : v->ImppOut; // 上限保護// 更新歷史值,為下次計算做準備v->IpvOld = v->Ipv; // 保存當前電流值v->PpvOld = P; // 保存當前功率值
}#endif /* UINV_DCDC_MPPT_H_ */代碼分析
這段代碼實現了一個**擾動觀察法(Perturb and Observe, P&O)**的MPPT(最大功率點跟蹤)算法,用于太陽能光伏系統中。以下是詳細解釋:
1. 算法原理
MPPT算法的目的是讓光伏系統始終工作在最大功率點,從而獲得最大的能量輸出。擾動觀察法的基本原理是:
- 通過小幅擾動(改變工作電流)來觀察功率變化
- 根據功率變化趨勢決定下一步的擾動方向
- 逐步收斂到最大功率點
2. 核心邏輯分析
初始化階段:
- 首次運行時,記錄當前電流和功率值作為基準
擾動觀察階段:
- 計算當前功率:
P = Vpv × Ipv - 比較當前功率與上一次功率的變化
- 根據電流變化方向和功率變化趨勢決定下一步動作:
| 電流變化 | 功率變化 | 下一步動作 | 說明 |
|---|---|---|---|
| 增加 | 增加 | 繼續增加電流 | 向最大功率點方向移動 |
| 增加 | 減少 | 減少電流 | 反向移動,避免越過最大功率點 |
| 減少 | 增加 | 繼續減少電流 | 向最大功率點方向移動 |
| 減少 | 減少 | 增加電流 | 反向移動,避免越過最大功率點 |
3. 安全保護
- 電流限幅:確保輸出電流在
MinI和MaxI范圍內 - 使能控制:通過
mppt_enable標志控制算法是否運行
4. 算法特點
- 簡單高效:實現簡單,計算量小
- 自適應性:能夠自動跟蹤最大功率點
- 穩定性:在最大功率點附近會有小幅振蕩,這是該算法的固有特性
C語言實現代碼-基于變步長擾動觀察法
/************************************************************************/
/*** @brief 最大功率點跟蹤算法主函數* @details 實現擾動觀察法(P&O)MPPT算法,通過調整光伏電壓參考值來尋找最大功率點* 算法包含快速搜索、動態調整、功率限制等功能*/
void MPPTTrack(void)
{float32 f32Temp0; // 臨時變量,用于存儲最大功率值// 靜態變量,用于算法控制static int16 Counter = 0; // 連續功率增加計數器static int16 test_dynamic_Flag = 0; // 動態測試標志位static int16 CounterPVPos = 0; // PV電壓過高計數器static int16 CounterPVNeg = 0; // PV電壓過低計數器static float32 Delta_MPPTStep = 4; // MPPT步長,初始值為4V// 計算功率變化閾值,基于當前功率的0.1%g_MpptCalc.f32DeltaPowerDC = g_MpptCalc.f32PVWattCurrent * 0.001f;// 限制功率變化閾值在3-5W之間,確保算法穩定性if(g_MpptCalc.f32DeltaPowerDC < 3){g_MpptCalc.f32DeltaPowerDC = 3;}else if(g_MpptCalc.f32DeltaPowerDC > 5){g_MpptCalc.f32DeltaPowerDC = 5;}else{}// 根據當前功率調整MPPT步長,實現自適應步長控制if(g_MpptCalc.f32PVWattCurrent < 2000) // 功率小于2kW時使用較大步長{Delta_MPPTStep = DeltaMPPTV;}else if(g_MpptCalc.f32PVWattCurrent > 4000) // 功率大于4kW時使用較小步長{Delta_MPPTStep = 2;}else{}// 獲取兩個MPPT通道中的最大功率值f32Temp0 = MAX(g_Mppt1Calc.f32PVWattCurrent, g_Mppt2Calc.f32PVWattCurrent);// 功率限制保護:當功率超過限制時,增加電壓參考值以降低功率if((g_MpptCalc.f32PVWattCurrent > g_PActiveLimit.f32PinputAll)||(f32Temp0 > g_PActiveLimit.f32Pinput1)){// 保存歷史電壓參考值g_MpptCalc.f32PvRefOldOld = g_MpptCalc.f32PvRefOld;g_MpptCalc.f32PvRefOld = g_MpptCalc.f32PvVoltRef;g_MpptCalc.f32PVWattOld = g_MpptCalc.f32PVWattCurrent;// 增加電壓參考值以降低功率g_MpptCalc.f32PvVoltRef += 1;return; // 功率限制時直接返回,不執行MPPT算法}// PV電壓范圍保護:確保PV電壓在合理范圍內if(g_MpptCalc.f32PvVoltRef > g_CalcResult.Ave.f32VPV1 + PV15V) // 電壓過高{CounterPVPos++;if(CounterPVPos>2) // 連續3次電壓過高,強制調整{g_MpptCalc.f32PvVoltRef = g_CalcResult.Ave.f32VPV1 - Delta_MPPTStep;CounterPVPos = 0;}}else if(g_MpptCalc.f32PvVoltRef < g_CalcResult.Ave.f32VPV1 - PV15V) // 電壓過低{CounterPVNeg++;if(CounterPVNeg>2) // 連續3次電壓過低,強制調整{g_MpptCalc.f32PvVoltRef = g_CalcResult.Ave.f32VPV1 - Delta_MPPTStep;CounterPVNeg = 0;}}else // 電壓在正常范圍內,執行MPPT算法{// 重置電壓異常計數器CounterPVNeg = 0;CounterPVPos = 0;// 快速搜索模式:用于系統啟動時的快速定位if(1 == g_MpptCalc.u16FastSearch){// 如果電壓高于開路電壓的83%,逐步降低電壓if(g_MpptCalc.f32PvVoltRef > (g_MpptCalc.f32PvOpenVolt * 0.83)){g_MpptCalc.f32PvVoltRef = g_MpptCalc.f32PvVoltRef - g_MpptCalc.f32PvOpenVolt * 0.01; }else // 達到合適電壓范圍,退出快速搜索模式{g_MpptCalc.f32PvVoltRef = g_MpptCalc.f32PvVoltRef + Delta_MPPTStep; g_MpptCalc.u16FastSearch = 0;test_dynamic_Flag = 0;Counter = 0;}// 保存歷史值g_MpptCalc.f32PvRefOldOld = g_MpptCalc.f32PvRefOld;g_MpptCalc.f32PvRefOld = g_MpptCalc.f32PvVoltRef;g_MpptCalc.f32PVWattOld = g_MpptCalc.f32PVWattCurrent;}else // 正常MPPT跟蹤模式{// 功率增加情況:當前功率大于等于上次功率+閾值if(g_MpptCalc.f32PVWattOld + g_MpptCalc.f32DeltaPowerDC <= g_MpptCalc.f32PVWattCurrent) {Counter++; // 增加連續功率增加計數if(Counter > 3) // 連續4次功率增加,啟用動態測試模式{test_dynamic_Flag=1;Counter = 0;}// 動態測試模式:使用更精細的步長調整if(test_dynamic_Flag==1){if (g_MpptCalc.f32PvVoltRef >= g_MpptCalc.f32PvRefOld) // 上次電壓增加{g_MpptCalc.f32PvRefOldOld = g_MpptCalc.f32PvRefOld;g_MpptCalc.f32PvRefOld = g_MpptCalc.f32PvVoltRef;g_MpptCalc.f32PvVoltRef = g_MpptCalc.f32PvRefOld - 0.1; // 小幅降低電壓}else if(g_MpptCalc.f32PvVoltRef < g_MpptCalc.f32PvRefOld) // 上次電壓降低{g_MpptCalc.f32PvRefOldOld = g_MpptCalc.f32PvRefOld;g_MpptCalc.f32PvRefOld = g_MpptCalc.f32PvVoltRef;g_MpptCalc.f32PvVoltRef = g_MpptCalc.f32PvRefOld + 0.3; // 小幅增加電壓}else{}}else // 正常模式:使用標準步長{ if(g_MpptCalc.f32PvVoltRef >= g_MpptCalc.f32PvRefOld) // 上次電壓增加{g_MpptCalc.f32PvRefOldOld = g_MpptCalc.f32PvRefOld;g_MpptCalc.f32PvRefOld = g_MpptCalc.f32PvVoltRef;g_MpptCalc.f32PvVoltRef += Delta_MPPTStep; // 繼續增加電壓}else // 上次電壓降低{g_MpptCalc.f32PvRefOldOld = g_MpptCalc.f32PvRefOld;g_MpptCalc.f32PvRefOld = g_MpptCalc.f32PvVoltRef;g_MpptCalc.f32PvVoltRef -= Delta_MPPTStep; // 繼續降低電壓}}g_MpptCalc.f32PVWattOld = g_MpptCalc.f32PVWattCurrent; // 更新歷史功率值}// 功率減少情況:當前功率明顯小于上次功率else if(g_MpptCalc.f32PVWattOld > g_MpptCalc.f32PVWattCurrent + g_MpptCalc.f32DeltaPowerDC){test_dynamic_Flag = 0; // 退出動態測試模式Counter = 0; // 重置計數器// 反向調整電壓:與上次調整方向相反if(g_MpptCalc.f32PvVoltRef >= g_MpptCalc.f32PvRefOld) // 上次電壓增加{g_MpptCalc.f32PvRefOldOld = g_MpptCalc.f32PvRefOld;g_MpptCalc.f32PvRefOld = g_MpptCalc.f32PvVoltRef;g_MpptCalc.f32PvVoltRef -= Delta_MPPTStep; // 降低電壓}else // 上次電壓降低{g_MpptCalc.f32PvRefOldOld = g_MpptCalc.f32PvRefOld;g_MpptCalc.f32PvRefOld = g_MpptCalc.f32PvVoltRef;g_MpptCalc.f32PvVoltRef += Delta_MPPTStep; // 增加電壓}g_MpptCalc.f32PVWattOld = g_MpptCalc.f32PVWattCurrent;}// 功率變化不明顯:使用較小步長微調else{test_dynamic_Flag = 0; // 退出動態測試模式Counter = 0; // 重置計數器// 使用較小步長(40%的標準步長)進行微調if(g_MpptCalc.f32PvVoltRef >= g_MpptCalc.f32PvRefOld) // 上次電壓增加{g_MpptCalc.f32PvRefOldOld = g_MpptCalc.f32PvRefOld;g_MpptCalc.f32PvRefOld = g_MpptCalc.f32PvVoltRef ;g_MpptCalc.f32PvVoltRef += (Delta_MPPTStep * 0.4); // 小幅增加電壓}else // 上次電壓降低{g_MpptCalc.f32PvRefOldOld = g_MpptCalc.f32PvRefOld;g_MpptCalc.f32PvRefOld = g_MpptCalc.f32PvVoltRef ;g_MpptCalc.f32PvVoltRef -= (Delta_MPPTStep * 0.4); // 小幅降低電壓} }}}// 電壓下限保護:確保PV電壓不低于最小工作電壓if(g_MpptCalc.f32PvVoltRef < PV250V + 5) {g_MpptCalc.f32PvVoltRef = PV250V + 5; // 強制設置為最小工作電壓}
}
優缺點
- 優點:實現簡單,計算量小
- 缺點:在MPP附近振蕩,光照突變時可能誤判
2. 電導增量法(Incremental Conductance)
原理
基于最大功率點處的數學特性:dIdV=?IV\frac{dI}{dV} = -\frac{I}{V}dVdI?=?VI?
算法流程
- 測量當前電壓和電流
- 計算電導(I/V)和微分電導(dI/dV)
- 比較兩者關系決定調整方向
- 重復上述過程
C語言實現代碼
// 電導增量法實現
#define DELTA_D 0.005f
#define MIN_DV 0.01f // 最小電壓變化閾值float prev_voltage = 0.0f;
float prev_current = 0.0f;
float duty_cycle = 0.5f;void mppt_incond_algorithm(void) {float voltage = read_voltage();float current = read_current();float delta_v = voltage - prev_voltage;if (fabs(delta_v) < MIN_DV) {// 處理小電壓變化情況float cond = current / voltage;if (fabs(cond) > 0.01f) {duty_cycle += (cond > 0) ? -DELTA_D : DELTA_D;}} else {float delta_i = current - prev_current;float inc_cond = delta_i / delta_v;float inst_cond = current / voltage;if (fabs(inc_cond + inst_cond) < 0.01f) {// 已在MPP附近} else if (inc_cond > -inst_cond) {duty_cycle -= DELTA_D;} else {duty_cycle += DELTA_D;}}// 限制和更新duty_cycle = (duty_cycle > 0.95f) ? 0.95f : duty_cycle;duty_cycle = (duty_cycle < 0.05f) ? 0.05f : duty_cycle;set_duty_cycle(duty_cycle);prev_voltage = voltage;prev_current = current;
}
優缺點
- 優點:對光照突變響應好,穩態精度高
- 缺點:計算復雜,對傳感器精度要求高
3. 其他算法
恒定電壓法(CV)
基于MPP電壓與開路電壓近似成比例關系的假設(Vmpp≈k?VocV_{mpp} ≈ k \cdot V_{oc}Vmpp?≈k?Voc?)。實現簡單但精度較低,常作為輔助啟動方法。
智能算法
- 模糊邏輯控制:無需精確數學模型,魯棒性強
- 神經網絡控制:需要訓練但精度高
- 粒子群優化(PSO):適用于局部遮陰等多峰情況
工程應用實踐
單通道 vs 多通道MPPT
單通道輸入
- 所有組串并聯接入單個MPPT通道
- 成本低但存在"木桶效應"
- 適合組件條件一致的場景
多通道輸入
- 多個獨立MPPT通道,各自追蹤最佳工作點
- 抗失配能力強,發電效率高
- 適合復雜安裝環境(多朝向、部分遮擋)
實際應用考慮因素
- 采樣頻率選擇:通常10-100Hz,需在響應速度和噪聲抑制間平衡
- 步長設計:大的步長響應快但振蕩大,小的步長精度高但響應慢
- 硬件保護:過壓、過流保護必須優先于MPPT算法
- 啟動策略:常采用CV法提供初始工作點
- 軟件濾波:對采樣值進行濾波處理,提高穩定性
在儲能變流器中的應用特點
儲能變流器中的MPPT技術與光伏逆變器類似,但有以下特點:
- 雙向能量流動:需要考慮充放電不同模式下的MPPT策略
- 電池SOC影響:電池狀態可能限制MPPT的工作范圍
- 多源協調:需要與電網、負載等其他能源協調工作
未來發展趨勢
- AI與機器學習應用:提高MPPT在復雜環境下的性能
- 多目標優化:兼顧效率、電池壽命、電網要求等多重目標
- 預測性MPPT:結合天氣預報提前優化工作策略
- 分布式MPPT:組件級MPPT進一步提高系統效率
結論
MPPT技術是提高可再生能源系統效率的關鍵技術。在實際工程中,需要根據具體應用場景選擇合適的算法和硬件架構。對于大多數應用,改進型的P&O和IncCond算法因其在性能和復雜度間的良好平衡而成為首選。隨著技術發展,智能算法和多目標優化將成為未來發展方向。
理解MPPT不僅需要掌握算法原理,更需要結合實際工程 constraints 進行系統級優化,才能在效率、成本和可靠性間找到最佳平衡點。















(div2) E. Power Boxes)



