無人機空中安全飛行評估需結合改進碰撞模型、蒙特卡洛仿真、安全間隔反推及動態避障策略,通過多機型分類與實時數據融合,實現從理論建模到實際部署的全流程管控,為城市低空密集飛行提供安全保障。
需求
無人機飛行間隔安全智能評估
- 無人機之間安全間隔評估:實現主要類型異構無人機飛行間隔安全評估,支持實時計算異構無人機之間的水平、垂直安全間隔;
- **無人機與有人機安全間隔評估:**實現主要類型異構無人機飛行間隔安全評估,支持實時計算無人機與有人機機之間的水平、垂直安全間隔;
無人機飛行安全風險評估
- 無人機飛行風險等級評估:考慮低空障礙物分布、無人機構型性能約束、氣象條件、飛行高度及潛在風險因素,形成飛行風險評估等級;
- **低空飛行風險地圖:**考慮低空障礙物、人口信息、氣象條件、地形條件生成飛行風險地圖;
無人機飛行間隔安全智能評估
技術手段
碰撞風險模型構建
2.1 模型選擇與改進
- 無人機間碰撞模型:
采用改進 Reich 模型或 Event 模型,根據無人機物理特性調整碰撞盒形狀(如球形、圓臺體)或者根據無人機尺寸進行構建的模型。- Reich 模型改進:將長方體碰撞盒替換為球形或橢球形,適應無人機對稱結構(如多旋翼無人機)。
- Event 模型應用:針對復合翼無人機,采用長方體碰撞盒;針對多旋翼無人機,使用圓臺體碰撞盒以提高精度。
- 雙碰撞模板模型(碰撞層+避險層)-小型無人機:基于無人機物理尺寸(碰撞層尺寸)+考慮避讓靈活性及定位誤差(GPS 誤差 ±5m)(避險層范圍)+建立碰撞風險與無人機密度的正相關關系(如 Matlab 仿真)(密度影響);
- 實現步驟:
- 計算碰撞層內無人機重疊概率。
- 引入避險層修正系數,評估避讓成功率。
- 結合氣象因素(風速、能見度)調整模型參數。
- 仿真驗證,確定最大安全密度(如 4.7 架 /km3)。
- 實現步驟:
- **位置誤差概率模型 - 中型物流無人機(縱向、側向、垂直方向):**基于 GPS/INS 組合導航誤差(如縱向σ=10m,側向 σ=5m)(定位誤差)+±5% 標稱速度(如順豐無人機巡航速度 60km/h)(速度誤差)+ 側風強度與航向偏移關系(如10m/s側風導致側偏15m)(側風誤差)進行評估。
- 實現步驟:
- 分方向建立碰撞概率積分公式(縱向:相對速度積分;側向:側風修正)。
- 計算各方向最小安全間隔(如縱向 145.31m,側向 47.94m)。
- 結合航線實際數據(如贛州物流航線)驗證模型。
- 輸出三維安全間隔矩陣,指導航線規劃。
- 實現步驟:
- **改進沖突區域模型 - 大型無人機(動態保護區+故障率修正):**基于圓柱形保護區(半徑=無人機尺寸+定位誤差)(沖突區域)+ 軍用無人機系統故障率(如 1×10??/小時)(故障率)+ 操作員響應成功率(如 95%)(人因可靠性)來進行評估;
- 實現步驟:
- 構建沖突區域,計算兩無人機軌跡交匯概率。
- 引入故障率與操作員可靠性權重(如式 CR=2×VOP×NP×[(1-α)×HCP+α×NHCP])。
- Event 模型中疊加偵察軌跡,分析高度層穿越頻率。
- 蒙特卡洛仿真確定最小安全間距(如水平 3km,垂直 300m)。
- 實現步驟:
各個模型的主要內容以及優缺點;
| 模型 | 主要內容 | 優缺點 |
|---|---|---|
| Reich 模型 | 為航空器設置碰撞模板和臨近層, 將另一航空器視為質點,分析該質 點從縱向、側向和垂直方向上進入 碰撞模板的概率 | 優點:可以較好解決飛行間隔安全性的評估問題,應用性很好; 缺點:限制條件較多、沒有考慮管制員的動 態參與、導航誤差的概率分布由于尾部樣本 (大誤差)過少而難以擬合,無法得到確切 的概率分布 |
| Event模型 | 設置擴展碰撞盒盒間隔層,碰撞風 險視為碰撞盒飛越間隔層的頻率與 航空器處于碰撞盒概率的乘積 | 優點:使用范圍廣、限制條件少、分析透徹, 參數明確,易理解和計算 缺點:只提出了平行航路上的縱向和側向的 碰撞風險分析方法,沒有對垂直方向上的事 件模型進行分析 |
| 位置誤差概率模型 | 分析航空器在三個方向上的位置誤 差,建立運動學方程,通過積分計 算位置誤差影響下的重疊概率 | 優點:可以分析不同時刻的碰撞概率和沖突 概率,全面地了解碰撞風險的動態變化過程 缺點:依賴于具體的導航設備,需要知道不 同導航設備的精度 |
| 沖突區域模型 | 建立航空器交叉飛行的沖突區域, 利用幾何關系求解在沖突區域內飛 行的航空器碰撞風險 | 優點:為飛機設立了沖突保護區,考慮了管 制員對碰撞風險的影響 缺點:沒有考慮飛行員對碰撞風險的影響 |
| 隨機微分方程模型 | 運用馬爾可夫過程解決吸收邊界的 碰撞問題,分析在瞬態邊界情況下 的交匯問題,并研究在三維航路網 絡的交匯率,通過求解偏微分方程 來研究碰撞風險 | 優點:避免了Reich模型限制條件過多的弊端 缺點:比 Reich 模型的理論基礎復雜,不易理解,沒有 Reich 模型應用廣泛 |
| 事故樹模型 | 將終端區的碰撞風險劃分為幾個不 同階段的碰撞風險,對于每個階段 的碰撞風險,采用事故樹和事件樹 相結合的方法從側向、縱向和尾流 間隔三個角度研究縮小間隔標準所 導致的風險 | 優點:可以清晰的分析每部分因素對碰撞風 險的影響 缺點:需要構建復雜且全面的事故數,過程繁瑣 |
- 無人機與飛鳥碰撞模型:
建立基于位置誤差的概率模型,假設飛鳥軌跡服從正態分布,計算縱向、側向、垂直方向的重疊概率。
2.2 關鍵參數定義
- 碰撞盒尺寸:根據無人機尺寸(長度、翼展、高度)確定,例如球形碰撞盒半徑為機身最大尺寸。
- 定位誤差:服從正態分布,結合 RNP(所需導航性能)確定標準差(如 RNP=15 米對應 σ=7.65 米)。
- 速度誤差:服從均勻分布,結合最大速度和俯仰角限制模擬相對速度。
- 氣象因素:譬如側風,通過引入風速-航偏角模型(如 Δy=風速×sin(θ)×Δt);并且能見度的影響避讓決策概率(低能見度下避險層擴大 20%)。
- 無人機性能:統計不同型號無人機的故障率(MTBF)和可靠性(如 RQ-1B 可靠性為 89%)。結合空域內各機型比例,加權計算綜合性能參數。
參數計算與仿真
2.2.1 蒙特卡洛仿真
- 相對速度計算:考慮速度誤差、航向角、俯仰角分布,通過蒙特卡洛模擬生成隨機樣本,統計相對速度期望值。
- 重疊概率計算:
- 縱向:積分正態分布函數,計算實際距離小于碰撞盒半徑的概率。
- 側向與垂直:類似縱向,結合航路間隔標準與誤差分布。
2.2.2 安全目標水平(TLS)設定
- 參考民航標準(如 ICAO 的 5×10?? 次/飛行小時),針對無人機特性分級(確定風險等級):
- 輕型無人機:10?? 次/飛行小時
- 中型無人機:10?? 次/飛行小時
- 重型無人機:10?? 次/飛行小時
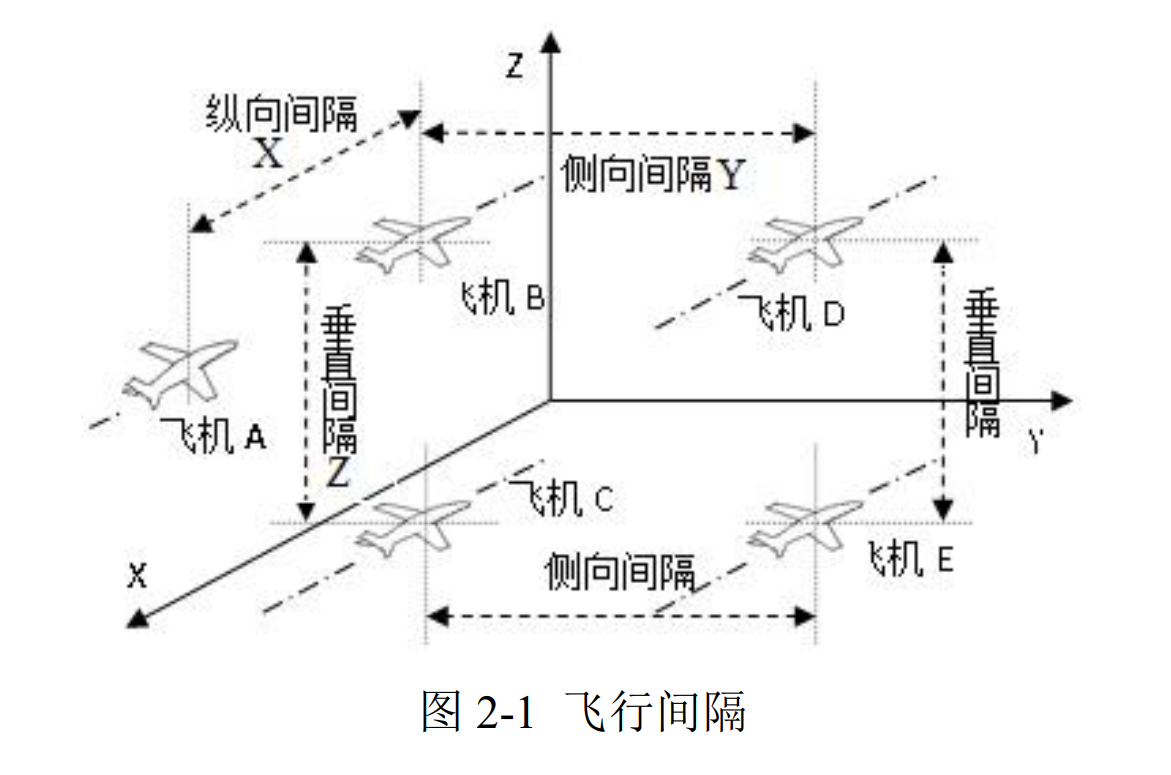
安全間隔確定
飛行間隔是航空器在飛行時航空器之間或航空器與障礙物之間所保持的空間距離,為保證飛行安全,這個空間距離需要滿足要求,但如果飛行間隔過大,會導致空域資源浪費,影響空域運行效率,故需要制定即適合航空器安全飛行又不造成空域浪費的間隔標準。在三維空間中,航空器的飛行間隔通常包含水平和垂直間隔,其中水平間隔又包含了縱向和側向間隔。
2.3.1 最小間隔計算
- 反推法:基于 TLS,調整縱向、側向、垂直間隔,使碰撞風險總和低于目標值。
公式示例:

通過迭代求解滿足 CR < TLS 的最小 Sx,Sy,Sz。
2.3.2 多機型間隔矩陣
- 分類統計:按有效載荷和載客量劃分無人機類型(輕型、中型、重型),計算平均碰撞盒尺寸。
- 組合間隔:不同機型組合時,取碰撞盒尺寸平均值,安全目標水平取較高者。
示例結果:
| 類型 | 輕型多旋翼 | 輕型復合翼 | 中型復合翼 | 重型復合翼 |
|---|---|---|---|---|
| 輕型多旋翼 | 82 m | 84 m | 90 m | 96 m |
| 輕型復合翼 | 84 m | 83 m | 91 m | 97 m |
| 中型復合翼 | 90 m | 91 m | 93 m | 100 m |
| 重型復合翼 | 96 m | 97 m | 100 m | 102 m |
動態評估與實時避障
2.4.1 實時數據融合
- 輸入數據:無人機實時位置、速度、航向、高度及環境信息(如飛鳥活動區域)。
- 動態更新:每隔 Δt 更新碰撞風險,重新計算安全間隔。
2.4.2 避障策略
- 路徑調整:若碰撞風險超過閾值,采用 A* 算法或人工勢場法調整航向或高度。
- 協同通信:多機協同場景下,通過 V2V(車聯網)共享位置信息,實現分布式避障。
實現方案
采用經典 Event 碰撞模型和基于圓臺體碰撞盒的改進 Event 碰撞模型,考慮定位誤差,速度誤差等計算碰撞模型參數。按照有效載荷與載客量將 eVTOL 分為輕型、中型和重型,計算碰撞盒尺寸,確定不同的安全目標水平,得出不同類型 eVTOL 的最小安全間隔。
只要航空器之間在飛行過程中始終保持飛行間隔大于最小的飛行安全間隔就不會發生碰撞,但目前大多數航空器的間隔判斷都依賴于導航定位系統,在實際飛行時,這些系統都會存在誤差,同時受人為因素和氣象等因素的影響,所以就導致航空器實際位置與顯示位置會有所偏差,從而引起航空器碰撞事故的發生。
為保證航空器的飛行安全,國際民航組織(International Civil Aviation Organization, ICAO)對航空器的安全飛行規定了統一的安全風險標準,這個標準規定了在不同情況下兩航空器的碰撞風險臨界值,即安全目標水平,總體安全目標水平為 1 × 10 ? 7 1\times 10^{-7} 1×10?7次事故/飛行小時,在空中發生碰撞的安全目標水平為 1.55 × 10 ? 8 1.55\times 10^{-8} 1.55×10?8次事故/飛行小時,縱向、側 向和垂直方向上碰撞的安全目標水平均為 5 × 10 9 5\times 10^{9} 5×109次事故/飛行小時,根據規定,將一次碰 撞看作為兩次事故。
復合翼碰撞模型
經典 Event 碰撞模型中的長方體碰撞盒,通用性強, 符合復合翼型 eVTOL 的整體外形特征;適用性更高,可以更好的刻畫不同型號的復合翼型 eVTOL, 經典 Event 碰撞模型的基本假設條件是:
- 模型僅考慮兩架飛行器之間的碰撞;
- 兩架飛行器之間的位置相互獨立;
- 兩架飛行器之間的縱向、側向、垂直間 隔分別記為 S x , S y , S z m S_{x},S_{y},S_{z}\mathrm{m} Sx?,Sy?,Sz?m; ;
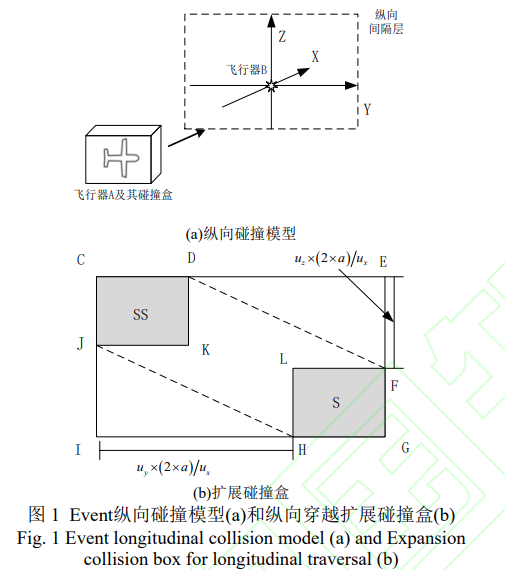
- Event 縱向碰撞模型主要研究的是同高度層同航路前后的碰撞;
假設兩個飛行器 A、B,根據飛行器 A 建立碰撞盒,碰撞盒的尺寸是飛行器 A 的兩倍,將 B 視為質點,以點 B 為原點建立三維直角坐標系,X 軸、Y 軸、Z 軸分別對應 的是縱向、側向、垂直方向。同時定義 Z 軸、Y 軸所構成的平面為縱向間隔層,設四邊形 CEGI 代表縱向間隔層,當 A 穿越縱向間隔層時將會留下投影軌跡,四邊形 LFGH(S 區域)—四邊形 CDKJ(SS 區域),若此時飛行器 B 在六邊形 CDFGHJ 中,則會發生碰撞
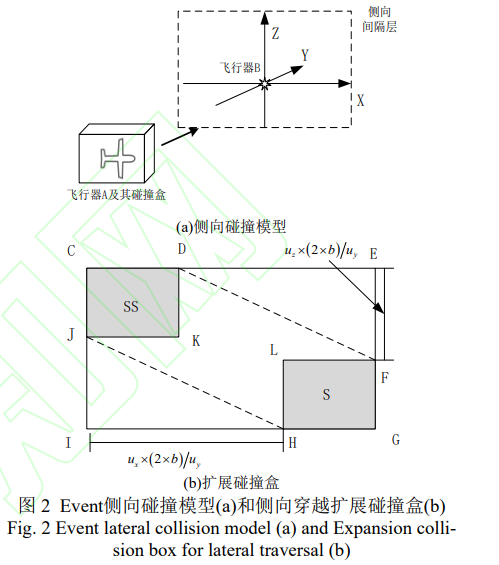
- Event 側向碰撞模型主要研究的是同高度層 相鄰平行航路的碰撞;
同理,側向就是 Z 軸、Y 軸構建的平面為側向間隔層:
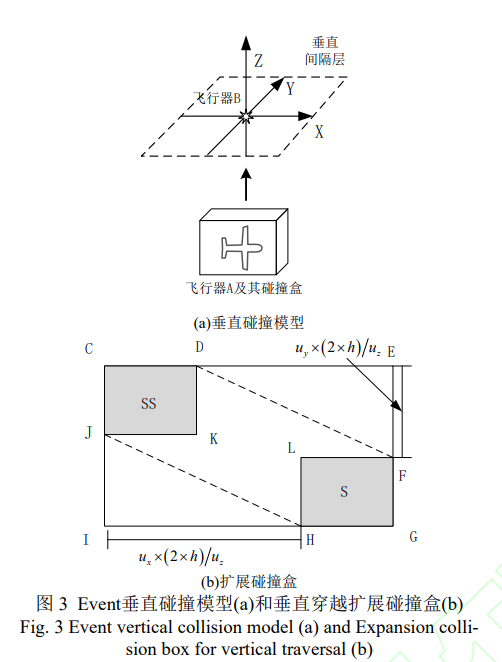
- Event 垂直碰撞模型主要研究的是兩架飛行 器在相同航跡、相鄰高度層上的碰撞;
同理,側向就是 X 軸、Y 軸構建的平面為側向間隔層:
多旋翼碰撞模型
針對多旋翼型 eVTOL,采用基于圓臺體碰撞盒的 Event 碰撞模型,相比于長方體、球體、拼接四棱錐等模型,圓臺體更加擬合多旋翼型 eVTOL 的輪廓,能更精確地計算 eVTOL 的碰撞風險;
擴展碰撞盒的面積與碰撞概率直接相關,計算改變碰撞盒后的碰撞風險,只需要計算出圓臺體擴展碰撞盒與原長方體擴展碰撞盒面積比值。
- Event 縱向碰撞模型:對于縱向穿越,改進后的縱向穿越擴展碰撞盒如圖所示
- **Event 側向碰撞模型:**對于側向穿越,改進后的縱向穿越擴展碰撞盒如圖所示
- Event 垂直碰撞模型:對于垂直穿越,改進后的縱向穿越擴展碰撞盒如圖所示

碰撞風險計算
該模型需要的參數有:碰撞盒的尺寸、縱向、側向、垂直重疊概率盒相對速度。根據參數進行推到以及仿真計算獲取計算安全間隔與碰撞概率的函數關系;然后根據這個量化的碰撞風險水平與安全目標水平 TLS(Target Level of Safety)進行比較,安全目標水平是一個可接受的碰撞風險概率最大值,它的單位是次事故每飛行小時,確定可接受的最大碰撞概率(即安全目標水平)可以反推出最小的安全間隔。
碰撞盒尺寸
為提高碰撞盒的普適性,分別取各類機型尺寸參數中的平均值(包括長度、翼展和高度),計算輕型多旋翼、輕型復合 翼、中型復合翼、重型復合翼之間的碰撞盒尺寸。
總結
目前來說主流實現的有兩種方式 Event 模型、改進的 Reich 模型,有一個實現方案是基于 Event 模型并且驗證了大疆 M600、M300 無人機,先基于這兩個模型進行實現一版本。
| 特征 | Reich 模型 | Event 模型 |
|---|---|---|
| 適用場景 | 平行航路簡單場景 | 交叉航路/垂直間隔復雜場景 |
| 維度支持 | 二維(縱向+側向) | 三維(含垂直方向) |
| 誤差處理 | 單誤差源疊加 | 多誤差源耦合分析 |
| 計算復雜度 | O(1) | O(n)(需蒙特卡洛仿真) |
| 典型應用 | 航路初始間距設計 | UAM/無人機空域沖突檢測 |
Rich 模型計算
核心參數:
- 航空器參數:
- L: 航空器長度 (m)
- W: 航空器翼展 (m)
- H: 航空器高度 (m)
- V: 相對速度 (m/s)
- 誤差參數:
- σ__x: 縱向導航誤差標準差 (m)
- σ__y: 側向導航誤差標準差 (m)
- λ: 單位時間內的飛行器流量 (架次/小時)
- 空域參數:
- S: 航路間距 (m)
- ΔH: 垂直間隔 (m)
核心公式:
總碰撞風險 = 縱向風險 + 側向風險
- 縱向碰撞風險:
P l o n g = λ 2 L V ? 1 2 π σ x exp ? ( ? S 2 2 σ x 2 ) P_\mathrm{long}=\frac{\lambda^2L}{V}\cdot\frac{1}{\sqrt{2\pi}\sigma_x}\exp\left(-\frac{S^2}{2\sigma_x^2}\right) Plong?=Vλ2L??2π?σx?1?exp(?2σx2?S2?)
- 側向碰撞風險:
P l a t = λ 2 W V ? 1 2 π σ y exp ? ( ? S 2 2 σ y 2 ) P_{\mathrm{lat}}=\frac{\lambda^2W}{V}\cdot\frac{1}{\sqrt{2\pi}\sigma_y}\exp\left(-\frac{S^2}{2\sigma_y^2}\right) Plat?=Vλ2W??2π?σy?1?exp(?2σy2?S2?)
Event 模型計算(改進型多維模型)
新增參數:
- 三維誤差:
- σ__z: 垂直導航誤差標準差 (m)
- 運動參數:
- θ: 航向角差 (°)
- ?: 俯仰角差 (°)
- 碰撞幾何:
- R: 等效碰撞球半徑 (m)
R = L 2 + W 2 + H 2 3 R=\sqrt{\frac{L^2+W^2+H^2}{3}} R=3L2+W2+H2??
分方向公式:
- 縱向事件風險:
P l o n g = λ 2 R V cos ? θ ? 1 2 σ x e r f ( L 2 σ x ) P_\mathrm{long}=\frac{\lambda^2R}{V\cos\theta}\cdot\frac{1}{2\sigma_x}\mathrm{erf}\left(\frac{L}{2\sigma_x}\right) Plong?=Vcosθλ2R??2σx?1?erf(2σx?L?)
1.
- 側向事件風險:
P l a t = λ 2 R V sin ? θ ? 1 2 σ y e r f ( W 2 σ y ) P_\mathrm{lat}=\frac{\lambda^2R}{V\sin\theta}\cdot\frac{1}{2\sigma_y}\mathrm{erf}\left(\frac{W}{2\sigma_y}\right) Plat?=Vsinθλ2R??2σy?1?erf(2σy?W?)
- 垂直事件風險:
P v e r t = λ 2 R V sin ? ? ? 1 2 σ z e r f ( H 2 σ z ) P_\mathrm{vert}=\frac{\lambda^2R}{V\sin\phi}\cdot\frac{1}{2\sigma_z}\mathrm{erf}\left(\frac{H}{2\sigma_z}\right) Pvert?=Vsin?λ2R??2σz?1?erf(2σz?H?)
參考
- 無人機低空飛行障礙物環境風險評估方法研究-以京津新城為例_賀洪波
- 不同類無人機運行碰撞風險研究_陽杰.pdf
- 城市低空無人機空中碰撞風險計算方法研究_勵瑾.pdf
- 面向城市低空的多機型eVTOL安全間隔評估_王興隆.pdf
- 無人機安全飛行風險評估研究_高俊杰.pdf
)



![[Datagear] [SQL]實現分組統計同時帶匯總行的兩種方式對比分析](http://pic.xiahunao.cn/[Datagear] [SQL]實現分組統計同時帶匯總行的兩種方式對比分析)






![[Excel VBA]如何製作買三送一優惠條件的POS結帳介面?](http://pic.xiahunao.cn/[Excel VBA]如何製作買三送一優惠條件的POS結帳介面?)





)
![[Windows] 一鍵實現重復工作自動化zTasker](http://pic.xiahunao.cn/[Windows] 一鍵實現重復工作自動化zTasker)
