在后續的系列文章中,我們將逐步深入探討 VGG16 相關的核心內容,具體涵蓋以下幾個方面:
-
卷積原理篇:詳細剖析 VGG 的 “堆疊小卷積核” 設計理念,深入解讀為何 3×3×2 卷積操作等效于 5×5 卷積,以及 3×3×3 卷積操作等效于 7×7 卷積。
-
架構設計篇:運用 PyTorch 精確定義 VGG16 類,深入解析 “Conv - BN - ReLU - Pooling” 這一標準模塊的構建原理與實現方式。
3. 訓練實戰篇:在小規模醫學影像數據集上對 VGG16 模型進行嚴格驗證,并精心調優如 batch_size、學習率等關鍵超參數,以實現模型性能的最優化。
若您希望免費獲取本系列文章的完整代碼,可通過添加 V 信:18983376561 來獲取。
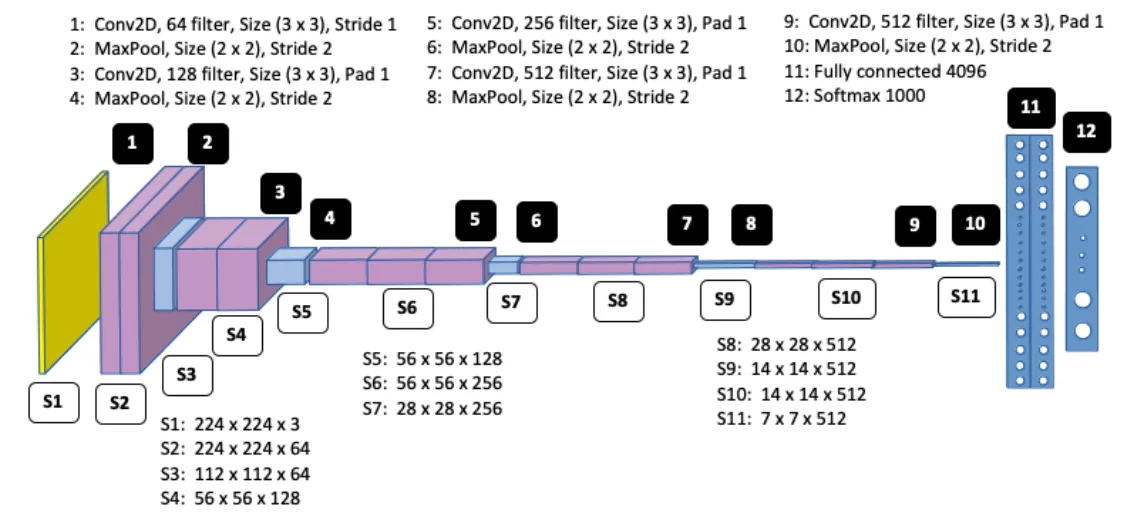
一、VGG16 架構
VGG16 作為卷積神經網絡中的經典架構,其結構清晰且具有強大的特征提取能力。下面是 VGG16 的架構圖:
二、訓練流程與代碼解析
1. 數據預處理:讓圖像適應模型輸入
CIFAR-10是一個更接近普適物體的彩色圖像數據集。CIFAR-10 是由Hinton 的學生Alex Krizhevsky 和Ilya Sutskever 整理的一個用于識別普適物體的小型數據集。一共包含10 個類別的RGB 彩色圖片:飛機( airplane )、汽車( automobile )、鳥類( bird )、貓( cat )、鹿( deer )、狗( dog )、蛙類( frog )、馬( horse )、船( ship )和卡車( truck )。每個圖片的尺寸為32 × 32 ,每個類別有6000個圖像,數據集中一共有50000 張訓練圖片和10000 張測試圖片。
然而,VGG16 模型原設計是針對 224x224 的圖像輸入。為了使 CIFAR10 數據集能夠適配 VGG16 模型,我們需要對圖像進行預處理。具體而言,通過transforms.Resize((224, 224))將圖像縮放至 224x224 的尺寸,再利用Normalize進行標準化處理,將均值和標準差均設為 0.5,從而使像素值歸一化到 [-1, 1] 區間。以下是關鍵代碼片段:
import torch
import torchvision
import torchvision.transforms as transforms
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchinfo import summaryfrom VGG16 import VGG16
device = torch.device('cuda')transform_train = transforms.Compose([transforms.Resize((224, 224)),transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)),
])transform_test = transforms.Compose([transforms.Resize((224, 224)),transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)),
])
2. 數據加載:高效讀取與批量處理
為了實現數據的高效讀取與批量處理,我們使用DataLoader來加載數據。設置batch_size = 128,以平衡內存使用和訓練效率;同時,設置num_workers = 12,利用多線程技術加速數據讀取過程。對于訓練集,我們將shuffle參數設置為True,打亂數據順序,避免模型記憶數據順序而導致過擬合;對于測試集,將shuffle參數設置為False,保持數據順序,便于結果的復現和評估。以下是具體代碼:
train = torchvision.datasets.CIFAR10(root='./data', train=True, download=True, transform=transform_train)
trainloader = torch.utils.data.DataLoader(train, batch_size=128, shuffle=True, num_workers=12)test = torchvision.datasets.CIFAR10(root='./data', train=False, download=True, transform=transform_test)
testloader = torch.utils.data.DataLoader(test, batch_size=128, shuffle=False, num_workers=12)
3. 模型構建:調用自定義 VGG16 網絡
在代碼中,我們假設VGG16類已經被正確定義,該類應包含 16 層卷積層和全連接層結構。通過model.to(device)將模型部署到 GPU 上進行訓練,以加速訓練過程。由于 CIFAR10 是一個 10 分類任務,因此模型的最終全連接層輸出維度應為 10。如果沒有可用的 GPU,需要將device設置為cpu,但訓練速度會顯著降低。
4. 訓練配置:損失函數與優化策略
在訓練過程中,我們需要選擇合適的損失函數和優化策略來指導模型的學習。具體配置如下:
- 損失函數:選用
CrossEntropyLoss來處理多分類問題,該損失函數會自動整合 Softmax 計算,簡化了代碼實現。 - 優化器:選擇隨機梯度下降(SGD)作為優化器,設置學習率
lr = 0.1,動量momentum = 0.9以加速收斂過程,同時設置權重衰減weight_decay = 0.0001,采用 L2 正則化防止模型過擬合。 - 學習率調度器:使用
ReduceLROnPlateau根據驗證損失自動調整學習率。當驗證損失連續 5 個 epoch 未下降時,學習率將乘以 0.1(factor = 0.1),這樣可以避免模型陷入局部最優解。以下是相關代碼:
classes = ['plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck']
model = VGG16().to(device)criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.1, momentum=0.9, weight_decay=0.0001)
scheduler = optim.lr_scheduler.ReduceLROnPlateau(optimizer, factor = 0.1, patience=5)EPOCHS = 200
for epoch in range(EPOCHS):losses = []running_loss = 0for i, inp in enumerate(trainloader):inputs, labels = inpinputs, labels = inputs.to(device), labels.to(device)optimizer.zero_grad()outputs = model(inputs)loss = criterion(outputs, labels)losses.append(loss.item())loss.backward()optimizer.step()running_loss += loss.item()if i % 100 == 0 and i > 0:print(f'Loss [{epoch + 1}, {i}](epoch, minibatch): ', running_loss / 100)running_loss = 0.0avg_loss = sum(losses) / len(losses)scheduler.step(avg_loss)
5. 訓練循環:迭代優化與監控
在 200 個 epoch 的訓練過程中,我們每 100 個批次打印一次平均損失,以便實時監控模型的訓練進度。從輸出日志可以看出,模型初始損失較高(第 1 個 epoch 約為 2.3),隨著訓練的不斷進行,損失逐漸下降,最終損失趨近于 0.001 左右,這表明模型對訓練數據的擬合效果良好。
print('Training Done')
# Loss [1, 100](epoch, minibatch): 3.8564858746528627
# Loss [1, 200](epoch, minibatch): 2.307221896648407
# Loss [1, 300](epoch, minibatch): 2.304955897331238
# Loss [2, 100](epoch, minibatch): 2.3278213500976563
# Loss [2, 200](epoch, minibatch): 2.3041475653648376
# Loss [2, 300](epoch, minibatch): 2.3039899492263793
# ...
# Loss [199, 100](epoch, minibatch): 0.001291145777431666
# Loss [199, 200](epoch, minibatch): 0.0017596399529429619
# Loss [199, 300](epoch, minibatch): 0.0013808918403083225
# Loss [200, 100](epoch, minibatch): 0.0013940928343799896
# Loss [200, 200](epoch, minibatch): 0.0011531753832969116
# Loss [200, 300](epoch, minibatch): 0.001689423452335177
三、訓練結果與問題分析
在訓練完成后,我們可以對模型進行保存和加載操作,以便后續的使用和評估。以下是保存和加載模型的代碼示例:
# 保存整個模型
torch.save(model, 'VGG16.pth')# 或者只保存模型的參數
torch.save(model.state_dict(), 'VGG16_params.pth')# 加載整個模型
loaded_model = torch.load('VGG16.pth')# 或者加載模型的參數
loaded_params = torch.load('VGG16_params.pth')# 如果只加載了模型的參數,需要先將參數加載到模型對象中
# 假設我們有一個新的模型實例
new_model = VGG16(num_classes=10)
new_model.load_state_dict(loaded_params)correct = 0
total = 0with torch.no_grad():for data in testloader:images, labels = dataimages, labels = images.to(device), labels.to(device)outputs = model(images)_, predicted = torch.max(outputs.data, 1)total += labels.size(0)correct += (predicted == labels).sum().item()
print('Accuracy on 10,000 test images: ', 100 * (correct / total), '%')
通過測試集計算模型的準確率,我們得到約 86.5% 的結果。然而,需要注意以下兩個問題:
- CIFAR10 的挑戰:CIFAR10 數據集中的圖像分辨率較低(32x32),圖像細節較少,并且部分類別之間存在一定的相似性(如狗與貓),這對模型的特征提取能力提出了較高的要求。
- 過擬合風險:訓練損失極低,但測試準確率未能達到 90% 以上,這可能表明模型存在過擬合現象,即模型在訓練集上的表現遠好于在測試集上的表現。
四、優化方向:如何讓模型更上一層樓
1. 數據增強:對抗過擬合的 “核武器”
原代碼未使用數據增強技術,為了提高模型的泛化能力,我們可以添加以下數據增強操作:
- 隨機裁剪與翻轉:使用
transforms.RandomCrop(32, padding = 4)和transforms.RandomHorizontalFlip(),增加數據的多樣性,使模型能夠學習到更多不同視角和位置的特征。 - 顏色擾動:通過
transforms.ColorJitter(brightness = 0.1, contrast = 0.1, saturation = 0.1),增強模型對色彩變化的魯棒性,使其能夠適應不同光照和色彩條件下的圖像。 - Cutout/MixUp:采用隨機遮擋圖像區域(Cutout)或混合樣本(MixUp)的方法,進一步提升模型的泛化能力。
2. 模型調整:更適配小數據集的設計
- 使用預訓練模型:可以將在 ImageNet 上預訓練的 VGG16 模型權重遷移到 CIFAR10 任務中。但需要注意輸入尺寸的差異(從 224 調整為 32),可以嘗試凍結部分卷積層,只對后續層進行微調。
- 輕量化改進:VGG16 模型的參數量較大(約 1.38 億),對于 CIFAR10 這樣的小數據集可能會導致過擬合。可以考慮改用更小的網絡,如 VGG11、ResNet18,或者減少通道數(如將起始通道從 64 減少到 32)。
- 添加 Dropout:在全連接層前插入
nn.Dropout(0.5),抑制神經元之間的共適應現象,降低模型過擬合的風險。
3. 優化策略升級
- 學習率策略:可以改用余弦退火(Cosine Annealing)或周期性學習率(CLR)策略,動態調整學習率,幫助模型逃離鞍點,提高收斂速度和性能。
- 優化器選擇:嘗試使用 AdamW(結合權重衰減的 Adam)或 RMSprop 等優化器,這些優化器在處理稀疏梯度場景時可能更有效。
- 混合精度訓練:使用 PyTorch 的
torch.cuda.amp模塊進行混合精度訓練,減少顯存占用并加速訓練過程,尤其適用于長周期的訓練任務。
4. 訓練技巧與調參
- 早停(Early Stopping):監控驗證集損失,若連續多個 epoch 驗證集損失未提升,則提前終止訓練,避免無效的訓練過程。
- 標簽平滑(Label Smoothing):在損失函數中引入標簽平滑技術,防止模型對單一類別過度自信,提高模型的泛化能力。
- 調整批量大小:嘗試使用更小的
batch_size(如 64)以增加梯度更新的頻率,或者使用更大的批量(如 256)以充分利用 GPU 的并行計算能力。
5. 測試階段優化
- 測試時增強(TTA):在測試階段,對測試圖像進行多尺度裁剪、翻轉等操作,然后取預測結果的平均值,提升預測的魯棒性。
- 集成學習:訓練多個不同初始化的 VGG 模型,通過投票或平均法融合這些模型的預測結果,降低模型的隨機性影響,提高整體性能。
五、總結與實踐建議
本次實戰通過在 CIFAR10 數據集上訓練 VGG16 模型,全面展示了深度學習從數據預處理到模型部署的完整流程。86.5% 的準確率僅僅是一個起點,通過采用數據增強、模型輕量化、優化策略調整等一系列優化手段,完全有能力將模型的準確率提升至 90% 以上(CIFAR10 的當前最優模型準確率可達 95% 以上)。
深度學習的學習過程需要理論與實踐緊密結合,希望大家能夠動手實踐,親自體驗模型優化的過程。如果您需要完整代碼或希望進行進一步的討論,歡迎在評論區留言。







詳解)


)

)

)




