1.關于Diamond機械手
(1)位置模型推導
逆解:機械末端平臺的位置與驅動關節之間的關系。
?設p點在xy平面的坐標是(x,y)T,此時根據向量求解
OP等于向量r等于e向xy軸的向量+主動臂長度向xy軸的向量+從動長度向xy軸的向量。
即: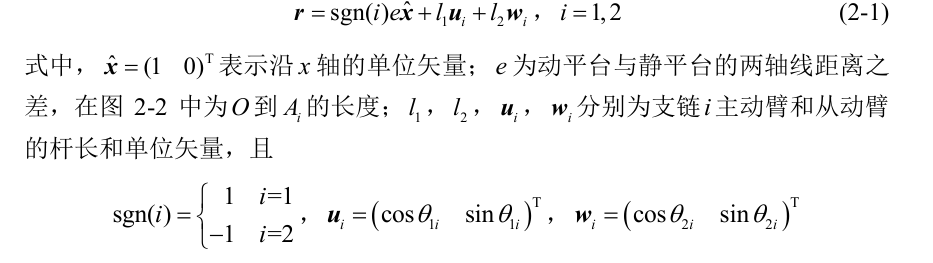
?這里注意一點:因為分左右臂的所以在符號上有所區別,同時Theata2為什么是那么大,因為cos(theta)= -sin(270-theta),因為從動臂在向量運算上是負的,所以要注意一下符號。
求主動臂theta1的角度


所以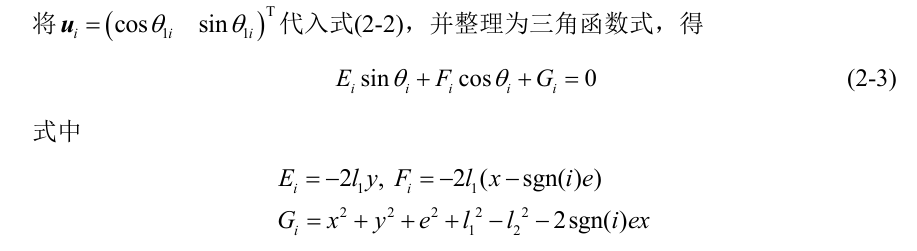
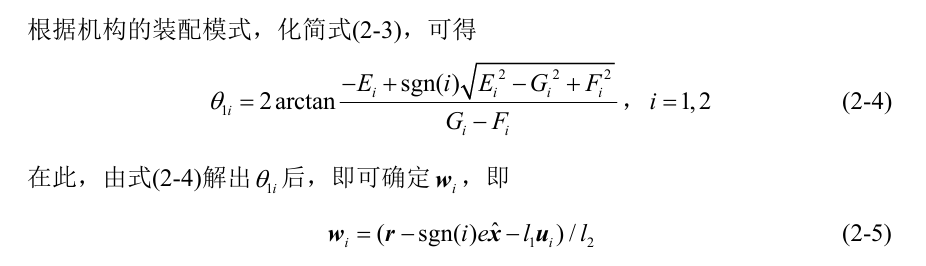
這此求出了機構的逆解,已知某段的xy坐標可以求出角度1和角度2的大小(2個角度1,2個角度2),既可以實現做基本的控制了。
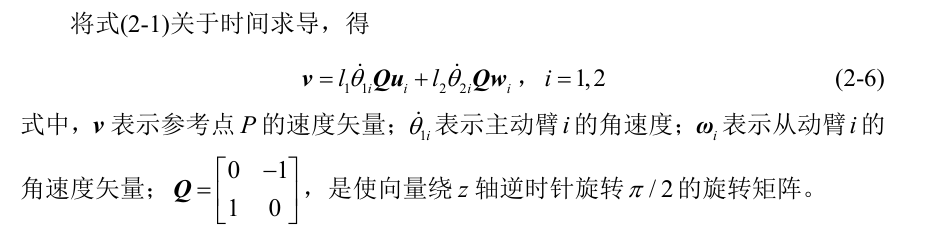
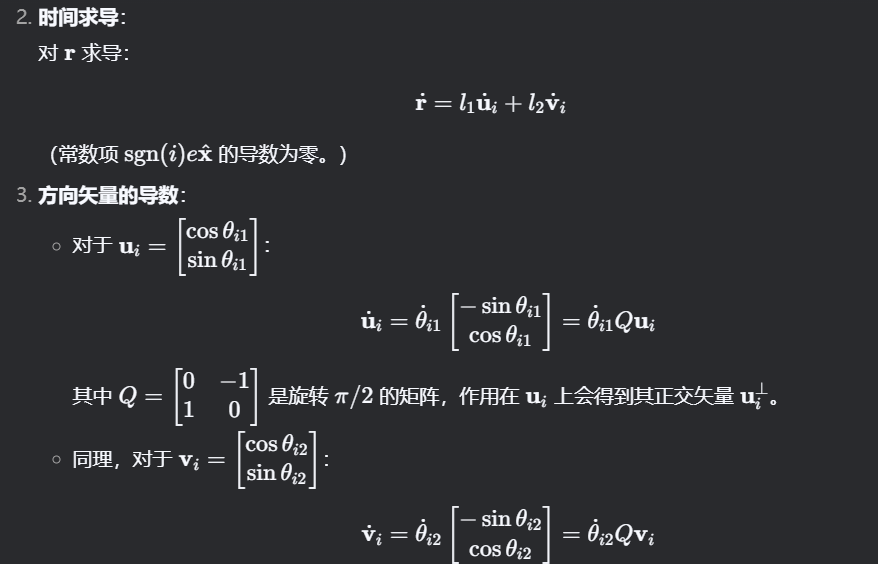
(2)速度模型推導
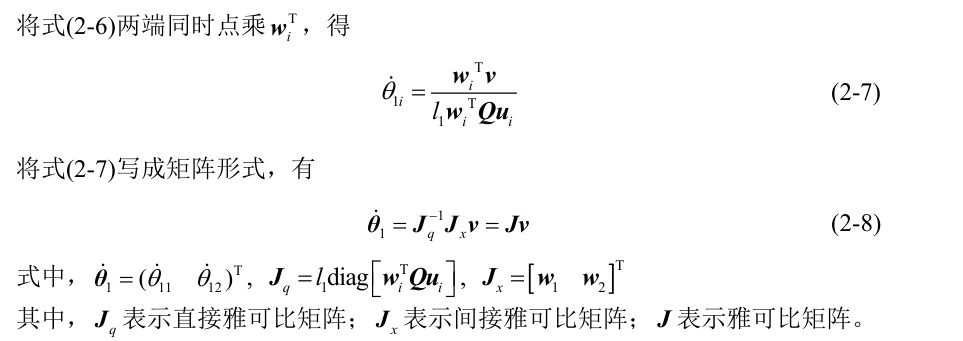
 ?奇異問題:簡單的是直接和間接雅克比矩陣的秩為零的時候為奇異解。
?奇異問題:簡單的是直接和間接雅克比矩陣的秩為零的時候為奇異解。



從動臂的質心速度等于兩段的速度除以2。?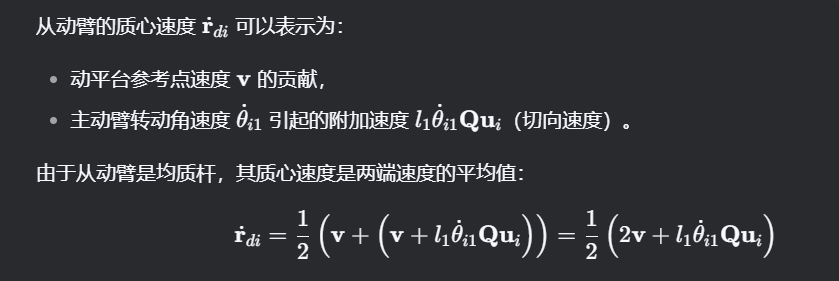
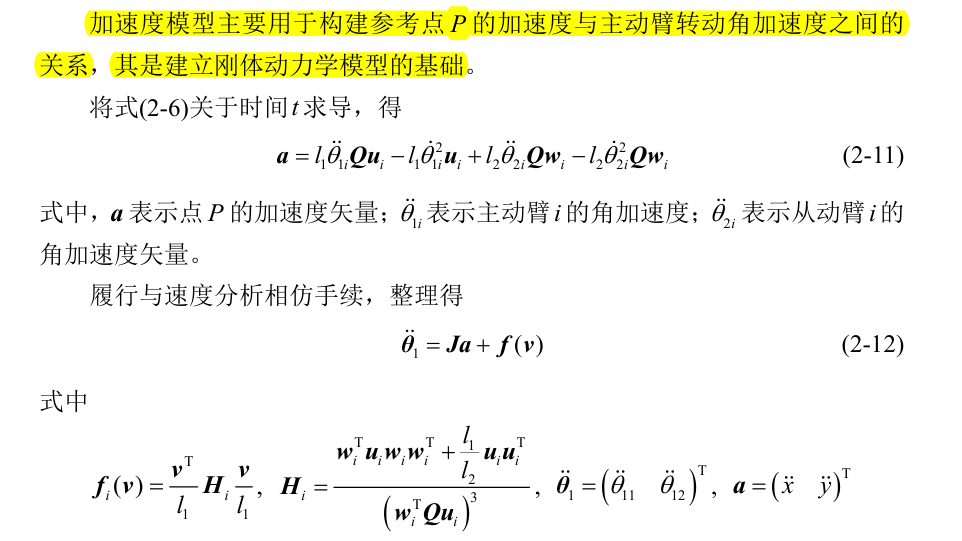
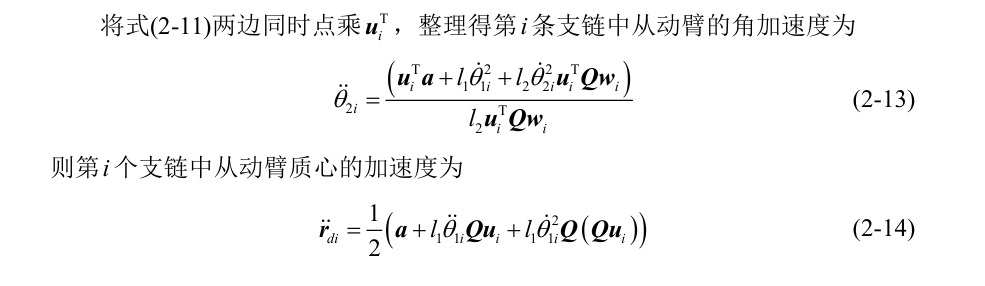
(3)加速度推導
加速度的推導和速度的推導方式一樣。
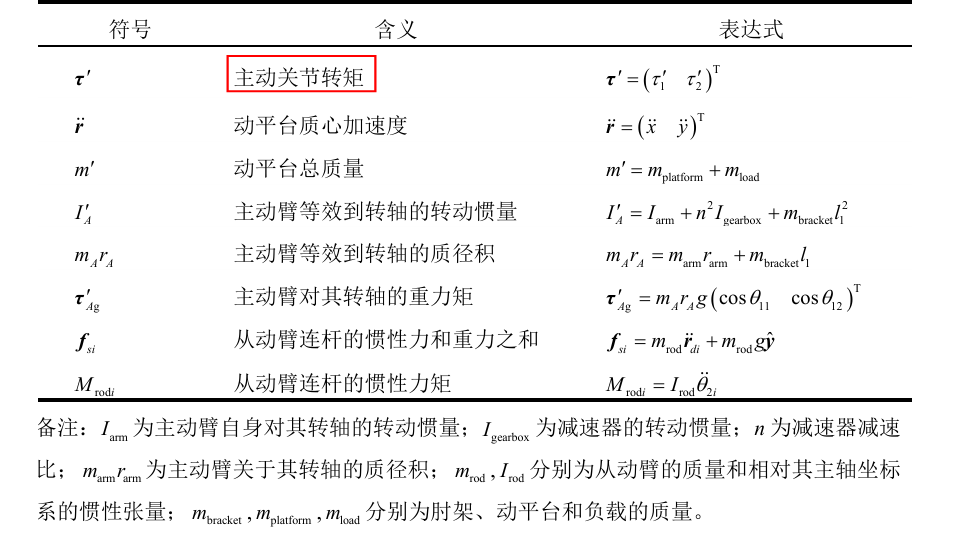
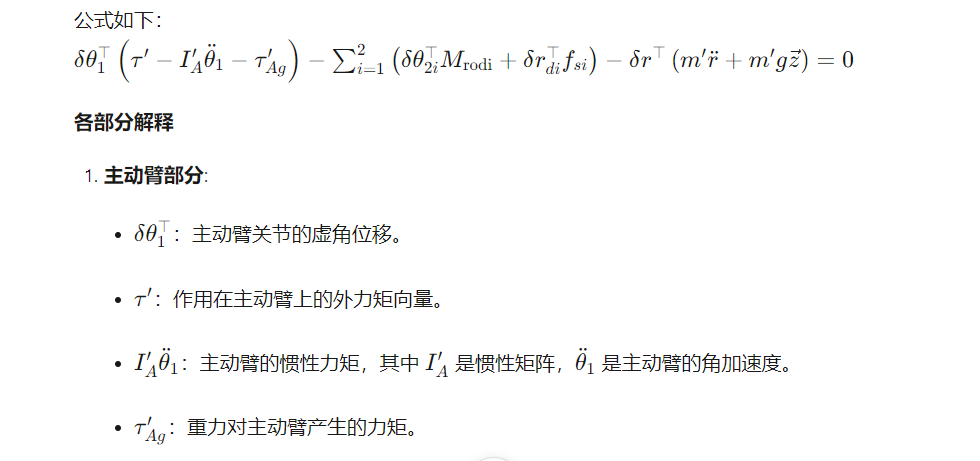
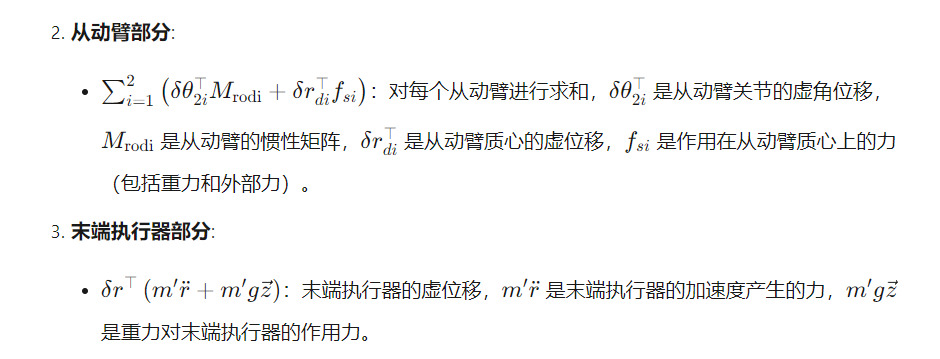
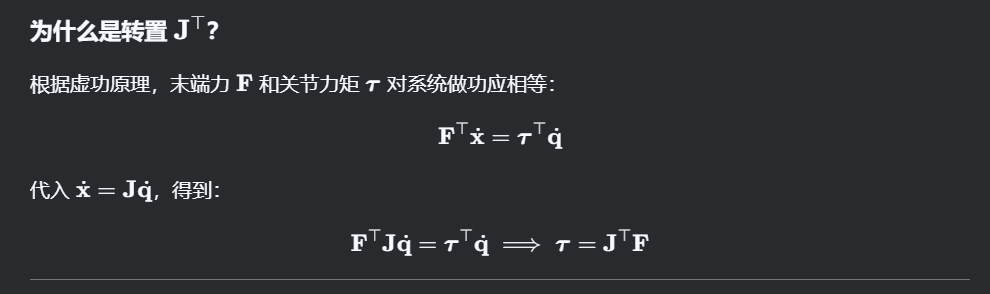
(4)剛體動力學

theta1是主動臂的虛位移,虛位移*電機力矩 - 虛位移*主動臂的轉動慣量*主動臂轉動的角加速度-虛位移*主動臂的動力矩 = 主動臂做的功
theta2是從動臂的虛位移,虛位移*從動臂的慣性力矩+從動臂的質心虛位移*從動臂的慣性力和重力之和。
動平臺質心的虛位移*動平臺的總質量*動平臺的質加速度+動平臺質心的虛位移*動平臺的總質量*g
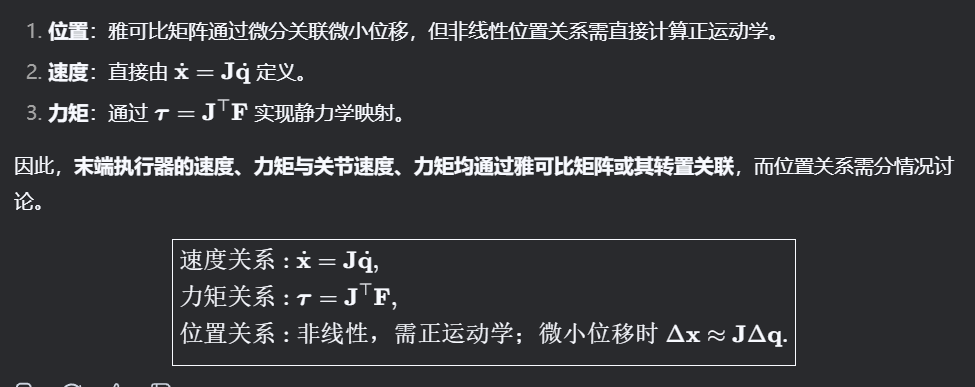
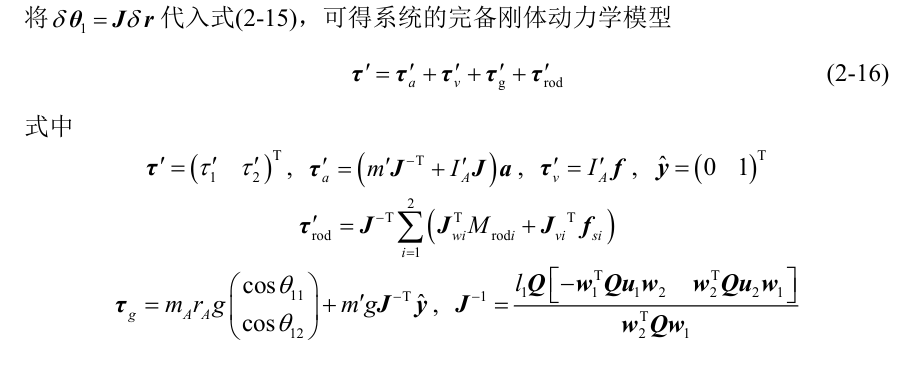
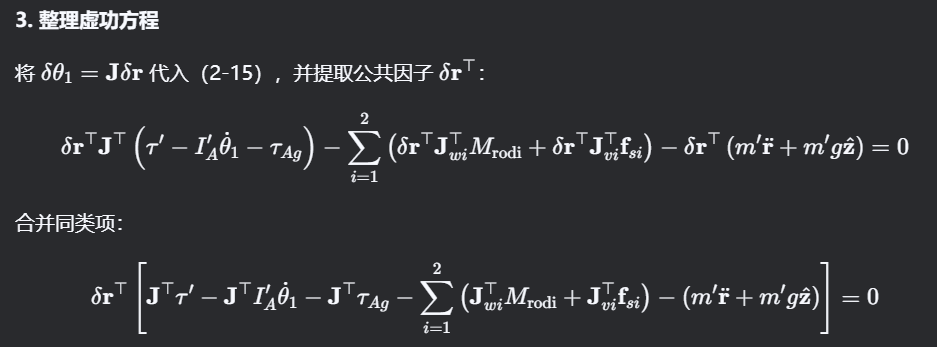
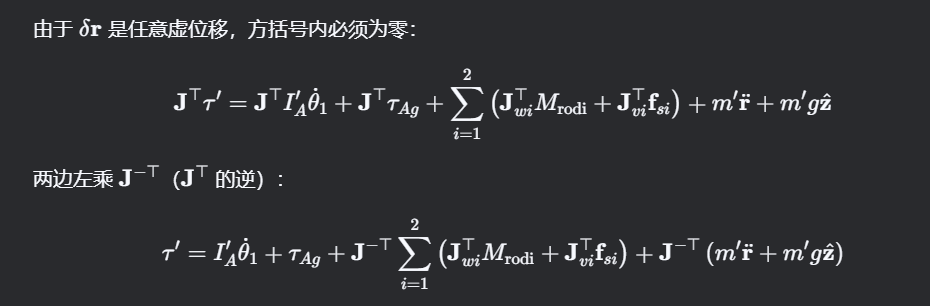
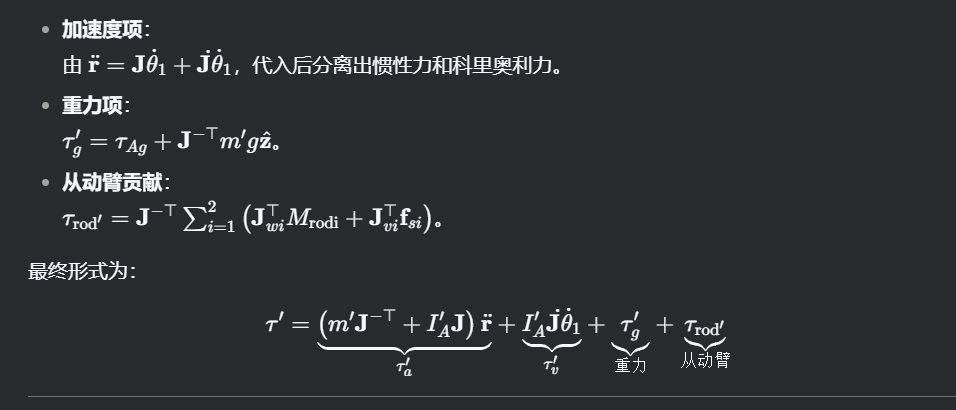
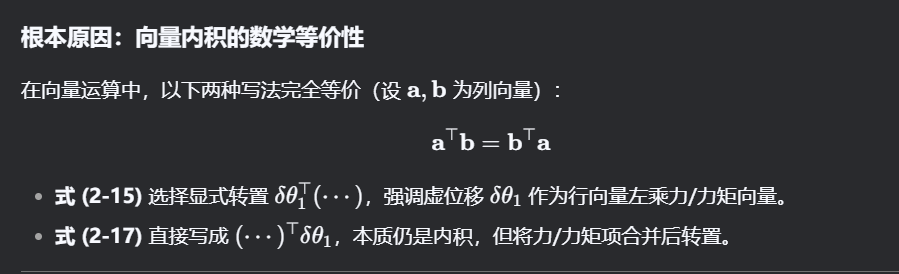
?(5)簡化動力學
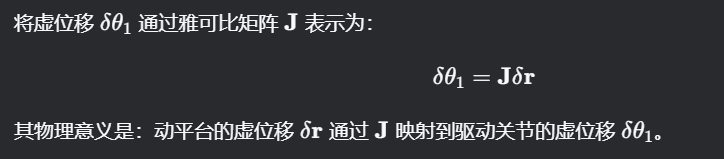
根據雅克比矩陣的定義,虛位移的定義可以知道
 ?
?
 ?
?
番外:
(1)
 ?(2)
?(2)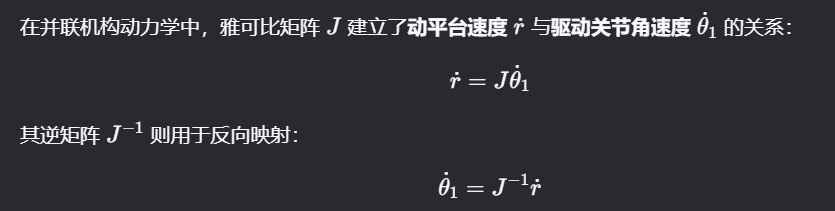
?
)
配置SSL 證書 實現 HTTPS 服務)











![[C++] STL中的向量容器<vector>附加練習](http://pic.xiahunao.cn/[C++] STL中的向量容器<vector>附加練習)

)


之GEM(SEMI 30))
)