一、題目解析
 ?
?
與62.不同路徑不同的一點是現在網格中有了障礙物,其他的并沒有什么不同?
二、算法解析
1.狀態表示
dp[i][j]表示:到[i,j]位置時,不同的路徑數
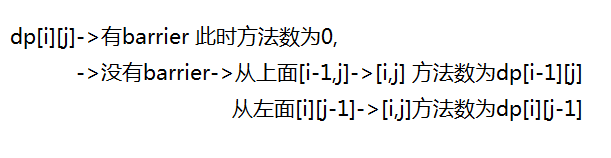
2.狀態轉移方程
由于多了障礙物,所以我們要判斷是否遇到障礙物
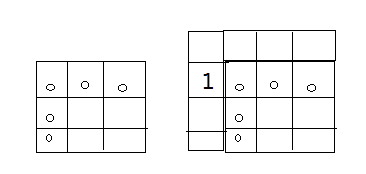
3.初始化
我們要保證初始化后(1)保證后面填表是正確的(2)下標的映射關系
 ?
?
觀察左邊帶圓圈的位置,可以發現在初始化的時候會有越界訪問的問題,所以就有了右圖的解決方法,多加一行一列,并初始化dp[1][0] = 1,為什么只初始化這一個值呢?根據這個圖我們能知道到達dp[1][1]位置時,機器人只有一種方法,同理其他圓圈格子同理,所以只需要初始化dp[1][0]其他位置的值可以計算得出。
這里的映射關系為dp[i][j] == obstacleGrid[i-1][j-1],即橫縱坐標都-1.
4.填表順序
為了保證填表時所需值存在,從左往右,從上往下,完成填表
5.返回值
由題需要返回到達右下角的方法數,所以返回dp[m][n]
雖然62沒有很大區別,但還是建議自己去上手寫一遍,鏈接:63. 不同路徑 II - 力扣(LeetCode)?
三、代碼示例
class Solution {
public:int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {int m = obstacleGrid.size();int n = obstacleGrid[0].size();vector<vector<int>> dp(m+1,vector<int>(n+1));dp[1][0] = 1;for(int i = 1;i<=m;i++){for(int j = 1;j<=n;j++){if(obstacleGrid[i-1][j-1] == 0){dp[i][j] = dp[i-1][j] + dp[i][j-1];}}}return dp[m][n];}
};?
看到最后,如果對您有所幫助還請點贊、收藏,我們下期再見!?
?



















解題報告 | 珂學家)