文章目錄
- 地圖分類
- 概念
- 覆蓋柵格建圖算法
- 柵格地圖的特征
- 數學描述
- 假設
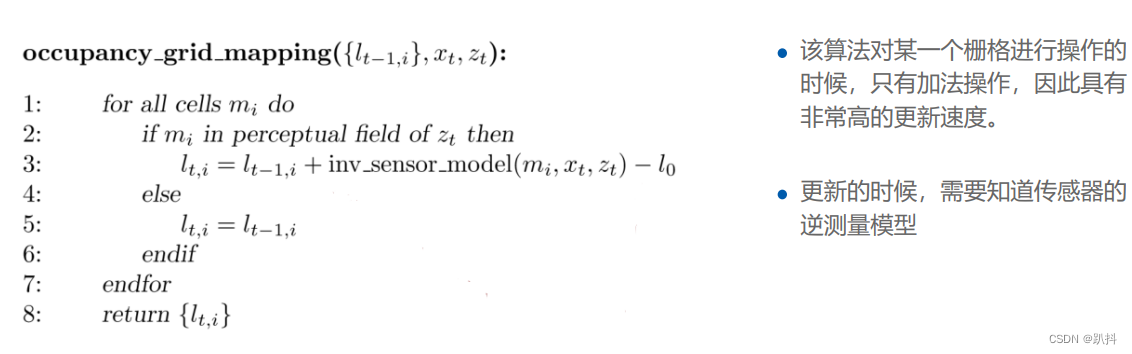
- 算法流程
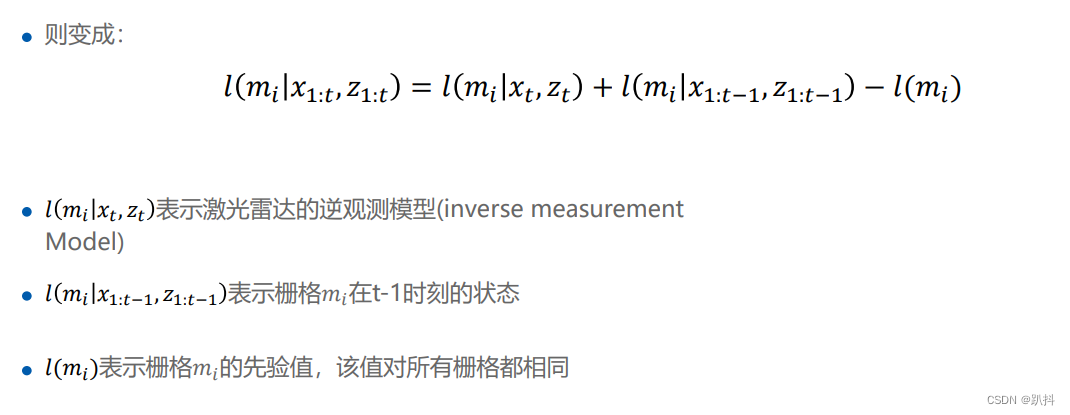
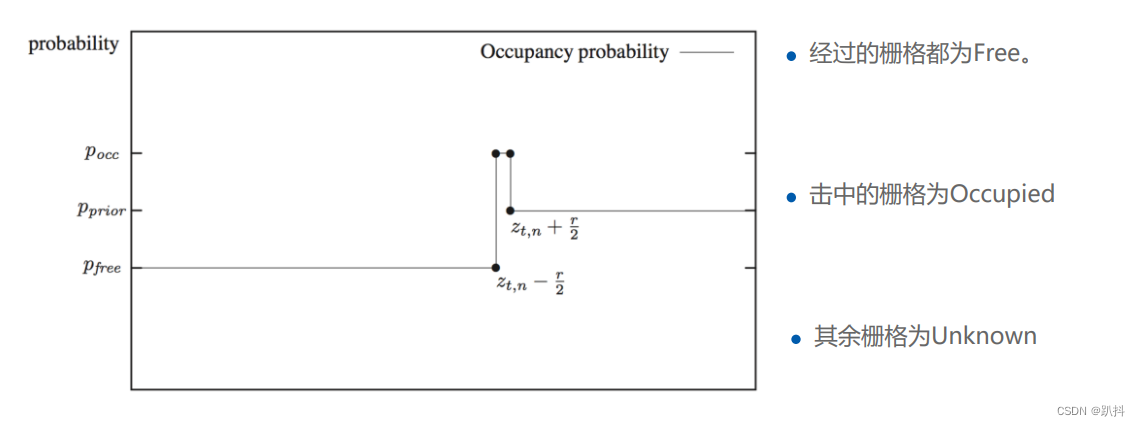
- 激光雷達的逆觀測模型
- 計數(Count Model)建圖算法
- 概念
- 數學描述
- 觀測模型
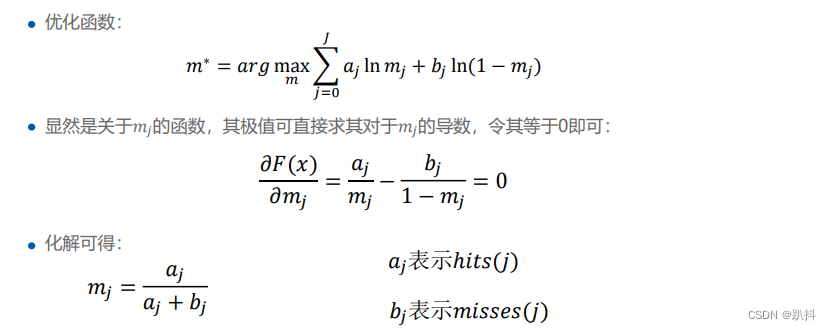
- 地圖估計
地圖分類
概念
地圖即為環境的空間模型。環境地圖是機器人進行定位和規劃的前提。定位可以用特征地圖(視覺),規劃可以用柵格地圖。地圖主要分為三類:
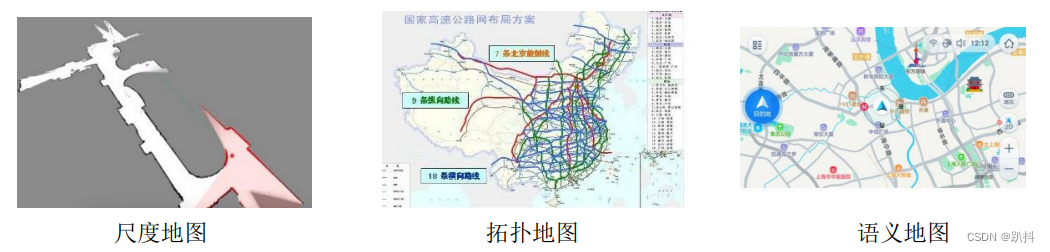
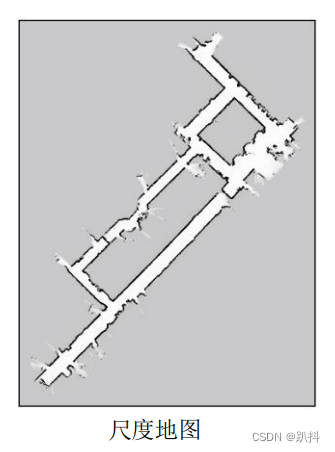
- 尺度地圖中的距離跟實際世界相對應。包括特征地圖、柵格地圖、點云地圖。一般用于機器人定位。
- 拓撲地圖用于表示兩點之間的聯通關系,包括是否連通以及距離,不包括路徑形狀等特點。一般用于大場景下。導航優先搜索拓撲地圖,再搜索尺度地圖。
- 語義地圖為加標簽的尺度地圖
覆蓋柵格建圖算法
柵格地圖的特征
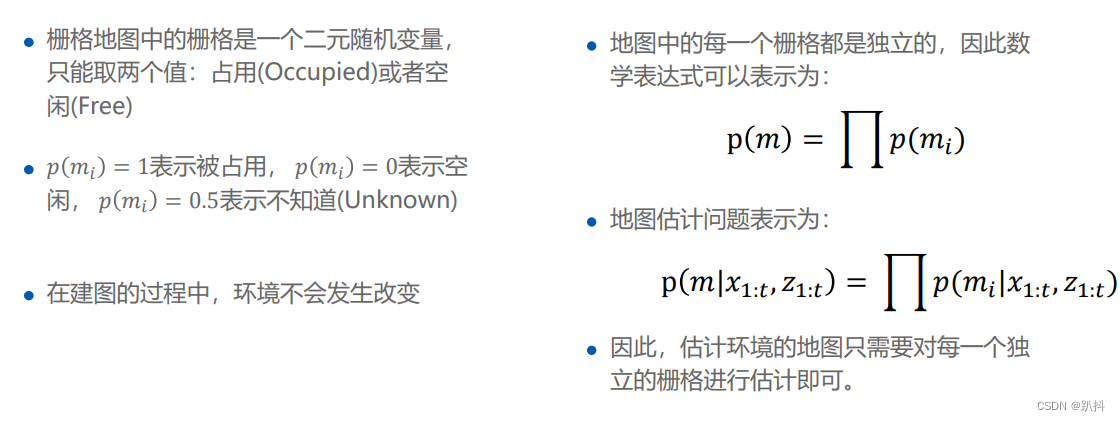
把環境分解成一個一個的小柵格,每個柵格有兩種狀態:占用(Occupied)或者空閑(free)
由于分辨率的設置,有可能去除小的可通行區域。可以使用自適應分辨率的地圖緩解。同時,柵格地圖是非參模型,也就是說由很多柵格組成(這話聽起來有點奇怪hhh)。隨著地圖的增大,內存需求急劇增加。
柵格地圖天然區分可通行區域,適合進行路徑規劃。
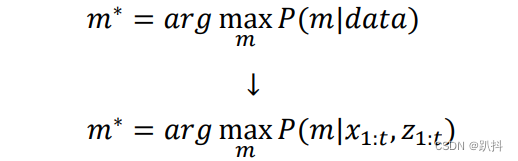
數學描述
- 給定機器人的位姿和傳感器的觀測數據
(主要指激光雷達)。

- 估計出最可能的地圖
假設
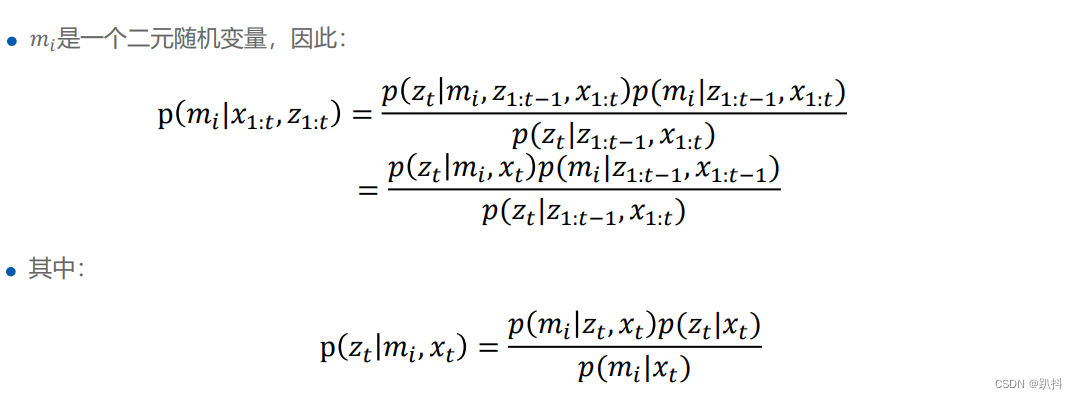
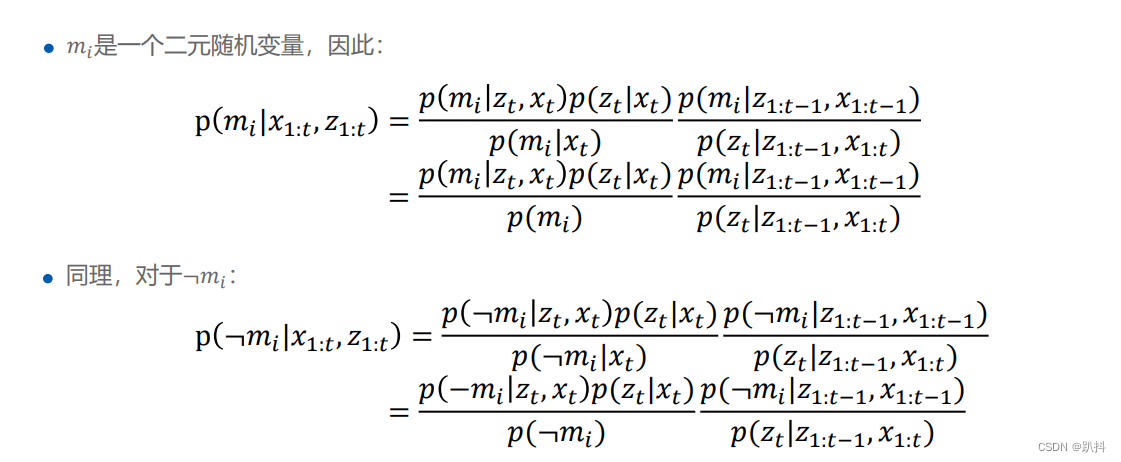
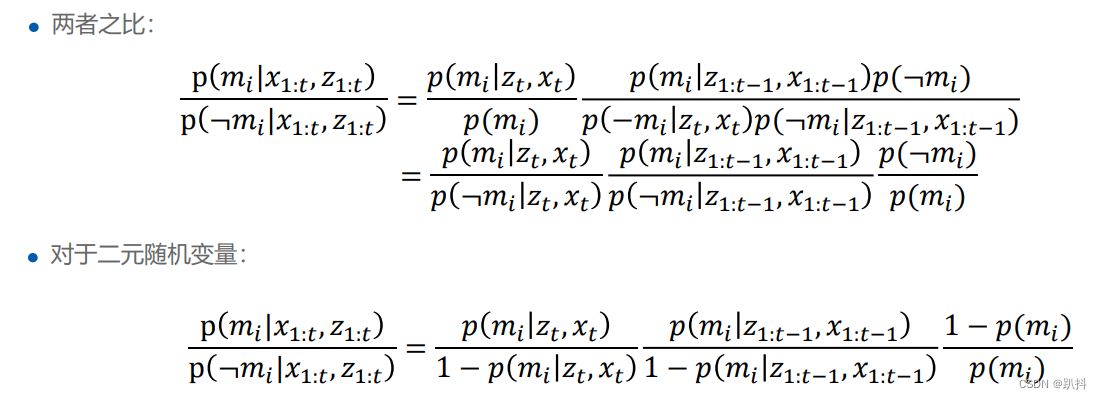
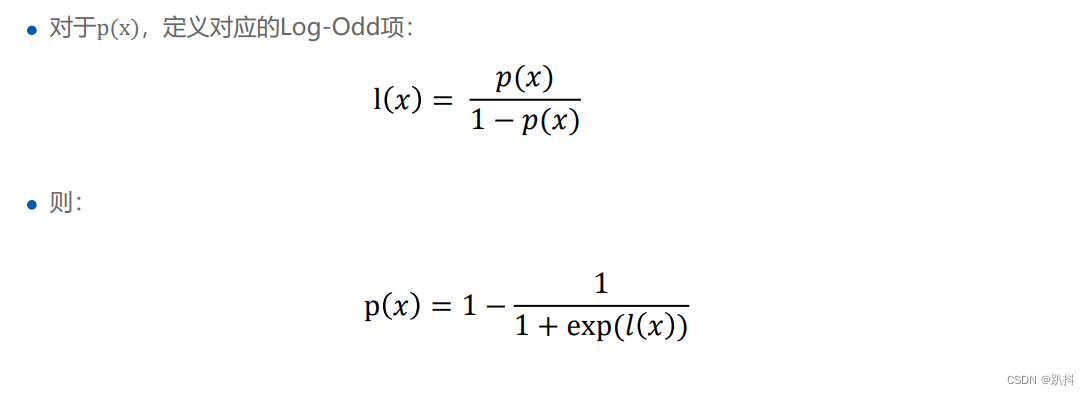
算法流程
激光雷達的逆觀測模型
計數(Count Model)建圖算法
概念
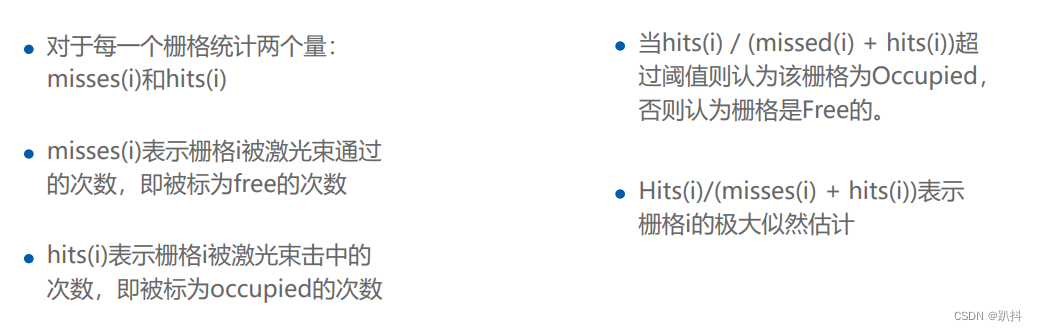
數學描述
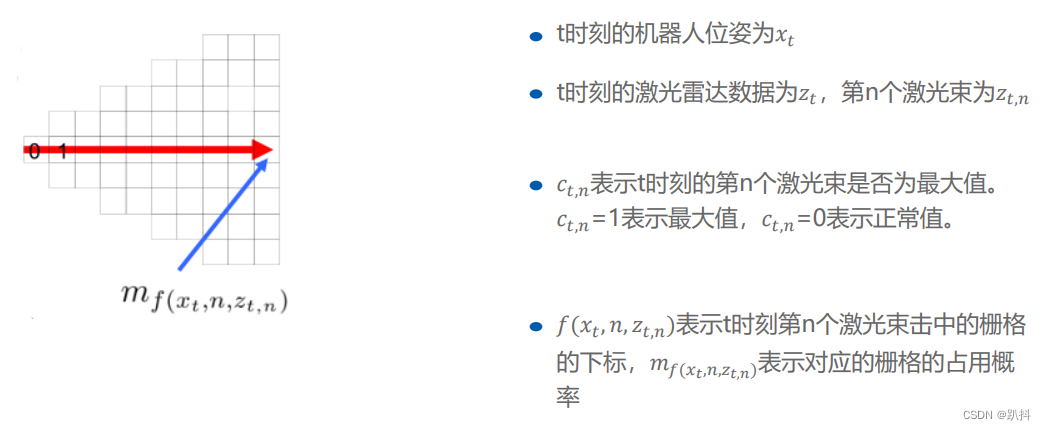
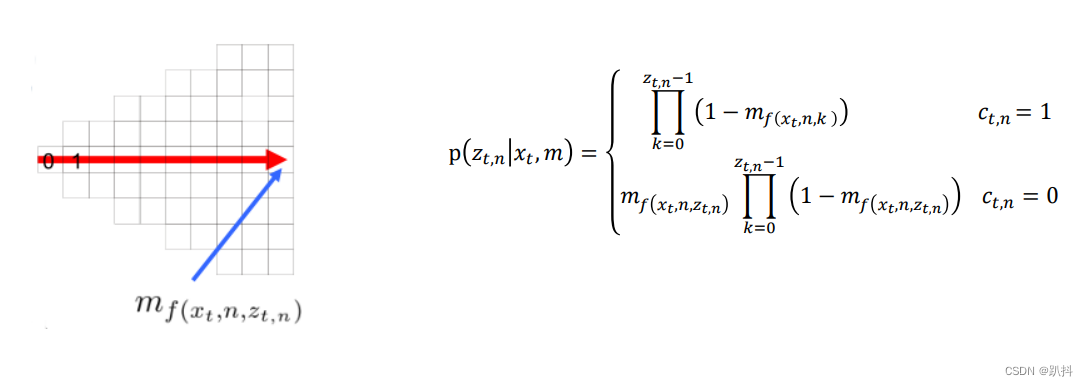
觀測模型
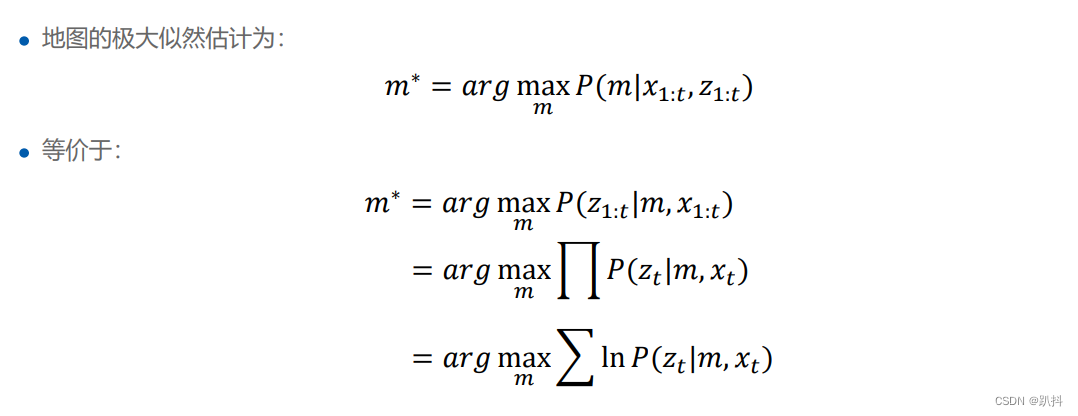
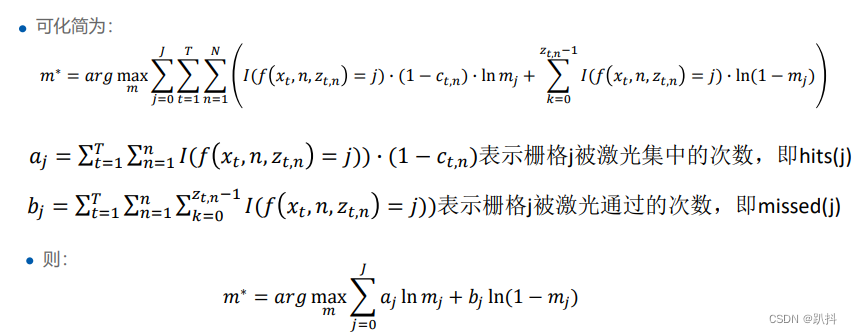
地圖估計

)







)








)
)