這里寫目錄標題
- 環境準備
- 基礎準備
- 模型參數
- 輸入和輸出
- 仿真原理圖
- 仿真資源
環境準備
- MatLab2021b
基礎準備
打開Matlab,在幫助文檔里面搜索step motor,我們這里選擇如下模型
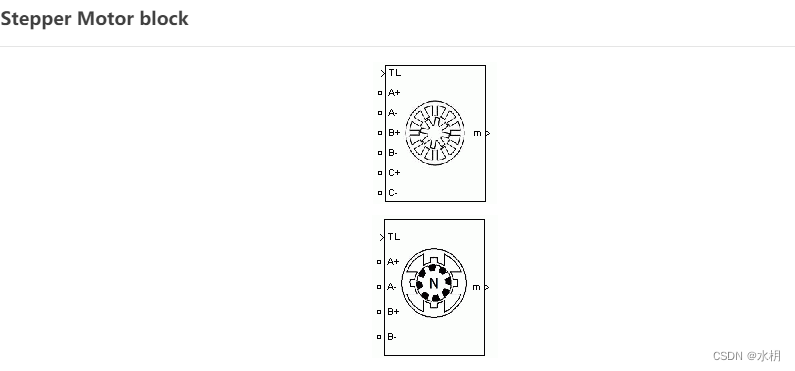
該模型實現了一個通用的步進電機模型:
- 可變磁阻步進電機
- 永磁或混合步進電機
下面我們看下永磁步進電機,其余介紹參考matlab的help文檔
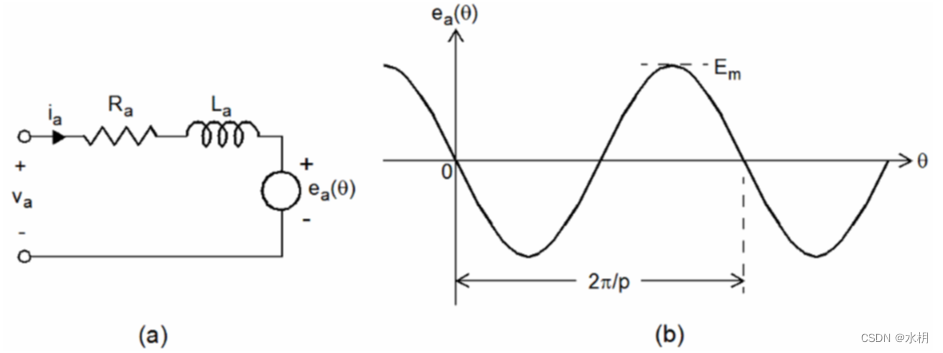
上圖顯示了永磁 (PM) 或混合步進電機中一相的等效電路:
在該模型中,Ra 和 La 分別代表 A 相繞組的電阻和電感。 由于磁體引入的氣隙值較大,PM 或混合式步進電機的繞組電感可以被認為與轉子位置無關。 電壓源 ea(θ) 表示電機反電動勢 (EMF),它是轉子位置的正弦函數:
ea(θ)=?pψmsin(pθ)dθdte_a(\theta) = -p\psi_msin(p\theta){d\theta\over dt} ea?(θ)=?pψm?sin(pθ)dtdθ?
p 是極對數。 極對數 p 由 p = Nr/2 給出。
ψm 是電機最大磁通量。
注意,在參考位置 (θ = 0),轉子上的北極與 A 軸極完全對齊,以實現 A 相反電動勢的零值。
兩相 PM 或混合式步進電機產生的電磁轉矩等于相電流和磁鐵產生的磁通量相互作用產生的轉矩與轉子凸極產生的制動轉矩的總和.
模型參數
這里以永磁/混合為例進行說明:
| 參數 | 說明 |
|---|---|
| 電機類型 | 選擇永磁/混合(默認)以實現 PM 或混合步進電機 |
| 相數 | 選擇 2(默認)或 4 相 |
| 繞組電感 | 每相繞組的電感 La,以 H 為單位。默認值為 10e-3。 |
| 繞組電阻 | 每相繞組的電阻 Ra,單位為歐姆。默認值為 1.2。 |
| 步距角 | 轉子運動的步距角,以度為單位。默認值為 30。 |
| 最大磁鏈 | 由磁鐵產生的最大磁鏈 ψm,以 V.s 為單位。默認值為 0.04。 |
| 最大定位扭矩 | 最大制動扭矩,Tdm,以 N.m 為單位,由轉子的凸極產生。默認值為 0.02。 |
| 總慣量 | 電機和負載的總慣性動量 J,以 kg.m2 為單位。默認值為 1e-4/5。 |
| 總粘性摩擦系數 | 電機和負載的總粘性摩擦系數 B,單位為 N.m.s。默認值為 1e-3。 |
| 初速度 | 初始旋轉速度,ω0,以 rad/s 為單位。默認值為 0。 |
| 初始位置 | 初始轉子位置,Θ0,以度為單位。默認值為 0。 |
| 采樣時間(-1 表示繼承) | 指定步進電機采樣時間,以 s 為單位。指定 –1 以繼承模型中 powergui 模塊的采樣時間。默認值為 –1。 |
輸入和輸出
TL:機械負載扭矩,單位 N.m TL 在電動機運行時為正,在發電機運行時為負。
| Signal | Definition | Units | Symbol |
|---|---|---|---|
| 1 | Phase | voltage | V |
| 2 | Phase | current A | Iph |
| 3 | Electromagnetic | torque | N.m |
| 4 | Rotor speed | rad/s | w |
| 5 | Rotor position | rad | Theta |
模塊的 Simulink? 輸出是一個包含五個信號的向量。 您可以使用 Simulink 庫中提供的 Bus Selector 模塊對這些信號進行解復用。
仿真原理圖

負載為0時進行仿真:


增加負載扭矩到8T.m,再次觀察波形:

仿真資源
- 兩線步進電機matlab仿真圖


)

)


)











