三維點云目標提取(續)
3.三維點云目標提取
3.1一般流程
先根據個人認識總結一下目標提取的一般性步驟:
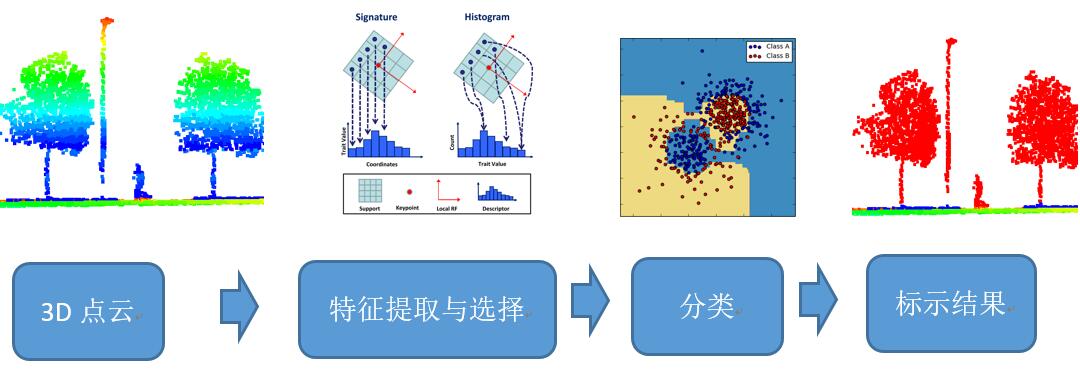
如上所示,三維點云的目標提取關鍵性的兩步即為:特征提取與選擇、分類,是不是整個方法流程與圖像中的目標識別有點像。本質上看,凡是涉及到目標識別,其方法流程大體是相同的。為什么要搞特征提取,因為我們要識別的目標一般是在一個大場景下,各種目標相互混雜,既然要對某個目標進行識別,當然就需要有一個指標或者數值來最大化不同目標之前的區別,這個指標或者數值就是所謂的目標特征了。所以我們在對目標進行識別時,往往要采用適合本目標的特征。就比如說圖像識別中的卷積神經網絡CNN,為什么它比用傳統通過手工設計的特征進行識別的識別率要高一大截,本質原因就是CNN的特征是通過學習得到的,而且特征表示與分類器是聯合優化的。分類器就不累贅了,SVM、boosting、決策樹等等。
3.2特征提取
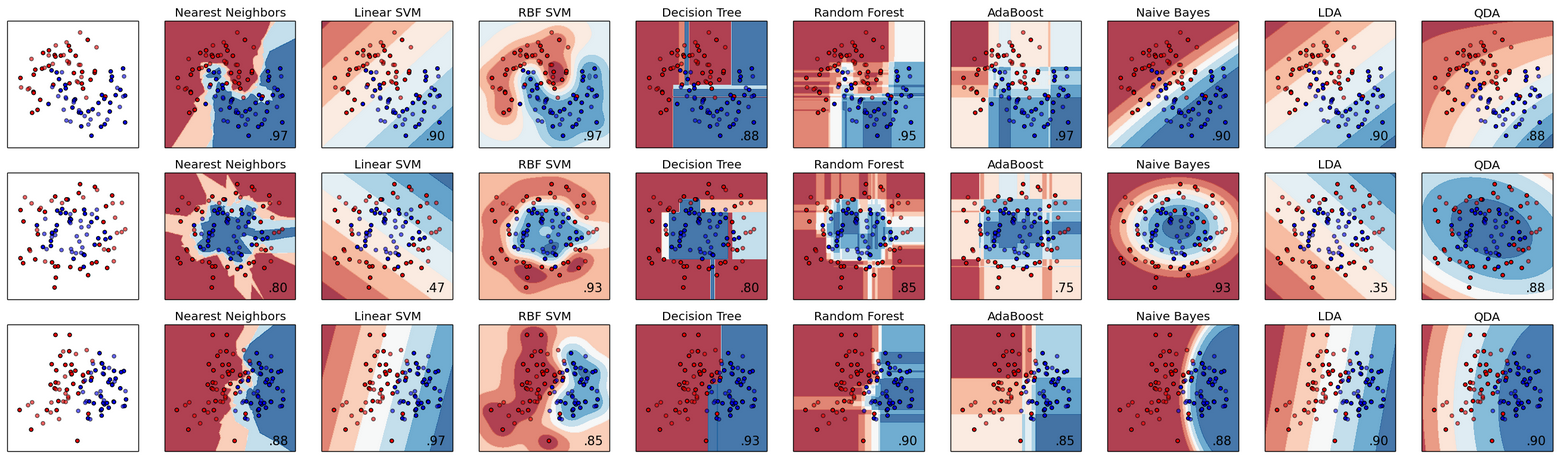
特征提取的重要性從以上就可以看得出來了,它是最終結果能不能滿足預期的最重要因素。來看看分類器的不同對結果的影響:
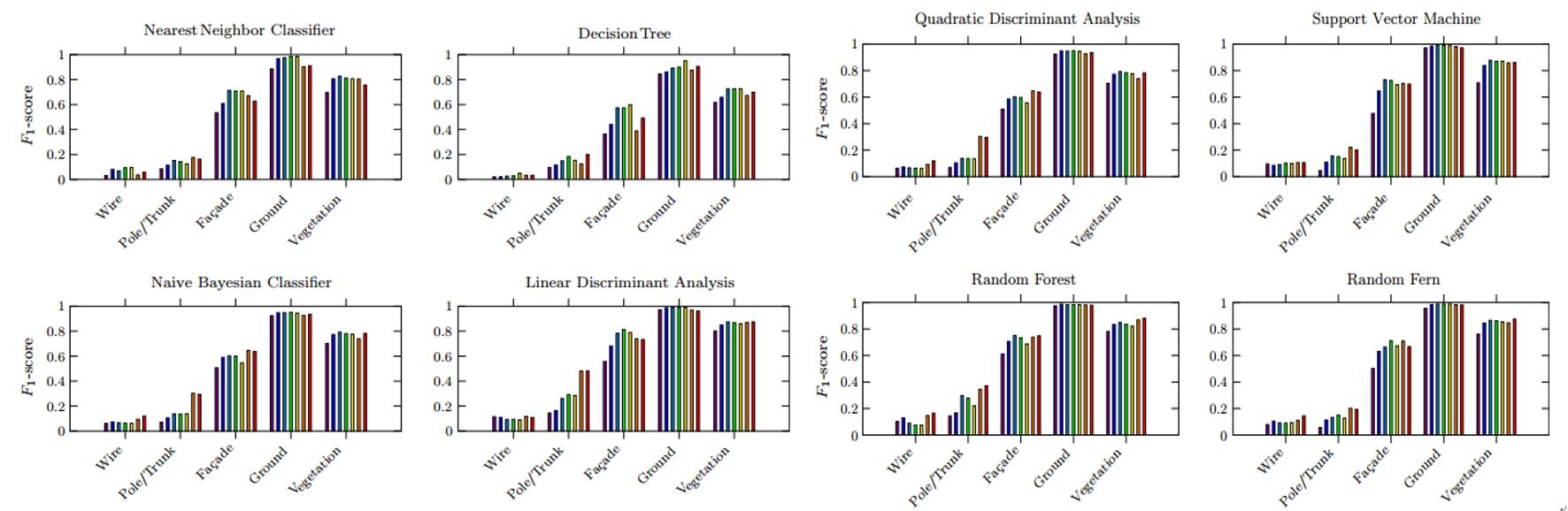
以上的分類器分別為最近鄰、決策樹、二次判別分析、SVM,所使用的特征是相同的。從結果中可以簡單的得出結論,影響目標識別的決定性因素肯定就是特征提取了。其實這也是我理解為什么CNN用的softmax分類器的原因,就是影響結果的不是分類器,而是特征。
好了,總結一下三維點云的特征吧。
<1>2D特征
2d幾何特征:半徑、點密度、面積…
2d局部形狀特征
基于累積圖的特征:格網點數、高程差、高程標準差…
<2>3D特征
3d幾何特征:半徑、高程差、高程標準差、點密度
3d局部形狀特征:線性特征、平面特征、散亂特征、總方差、各向異性、特征熵、特征值和曲率…
<3>紋理特征
RGB 強度
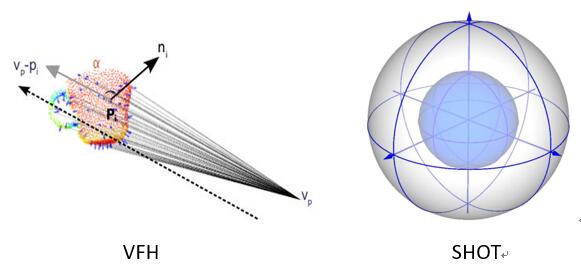
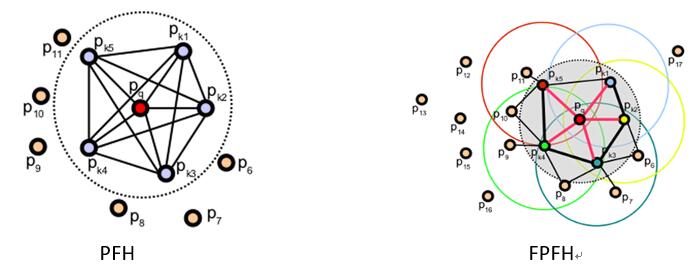
<4>統計圖特征
點特征直方圖PFH、快速點特征直方圖FPFH、視點特征直方圖VFH,Signature
of Histograms of OrienTations(SHOT)
<5>其他
Spin images,Global FPFH,Global Radius-based Surface Descriptor(GRSD),GlobalStructure Histogram(GSH)
3.3 分類器
分類器這個還是省略吧,僅憑大家所熱衷的啦,對結果提升不大,以下是一些常用的分類器:
4.總結
三維點云目標提取個人覺得還是很有研究前景的,畢竟目標整體的識別率不是很高,還有很多需要改進的地方。如前所說,影響整個結果的其實就是特征提取這一步了,個人覺得可以從這一步出發來進行研究,本人也做過一些相關實驗,就是結合深度學習,(有時間的話可以介紹介紹這一塊)參閱了一些國外主流期刊,貌似做的人不多。還有一點,個人覺得最好是將三維點云與其他傳感器得到的數據進行融合來研究,特別是圖像,研究的價值絕對是杠杠的。如果想知道一些具體的研究成果,大家可以去主流期刊看看,當然也可以問我啦,或者需要什么資料也可以啦,為國家做做貢獻~~~
---------------------?
作者:Teddysnow?
來源:CSDN?
原文:https://blog.csdn.net/a2008301610258/article/details/48785455?
版權聲明:本文為博主原創文章,轉載請附上博文鏈接!





瀏覽器兼容的JS寫法總結)
)





)






