首先安裝usb庫
$ git clone https://github.com/libusb/libusb.git
編譯libusb需要的工具
$ sudo apt-get install autoconf autogen
$ sudo apt-get install libtool
$ sudo apt-get install libudev*
編譯安裝
$ sudo ./autogen.sh
$ sudo make
$ sudo make install
$ sudo ldconfig
更新軟件庫
$ sudo apt-add-repository universe
$ sudo apt-get update
安裝kinect驅動
安裝編譯libfreenect需要的庫
$ sudo apt-fast install cmake freeglut3-dev pkg-config build-essential libxmu-dev libxi-dev libusb-1.0-0-dev
下載源碼
$ git clone git://github.com/OpenKinect/libfreenect.git
安裝編譯
$ cd libfreenect
$ mkdir build
$ cd build
$ cmake ..
$ make
$ sudo make install
?因為TK1USB的供電方式插上kinect會不能發現所以添加開機自啟修改
$ sudo gedit /etc/rc.local# Disable USB auto-suspend, since it disconnects some devices such as webcams on Jetson TK1.
echo -1 > /sys/module/usbcore/parameters/autosuspend
$ sudo reboot
開機后重新拔插kinect usb
?修改usb權限文件
51-kinect.rules在libfreenect/platform/linux/udev/51-kinect.rules目錄下
$ sudo cp 51-kinect.rules /etc/udev/rules.d/51-kinect.rules
安裝ros openni功能包
$ sudo apt-get install ros-indigo-openni*
?
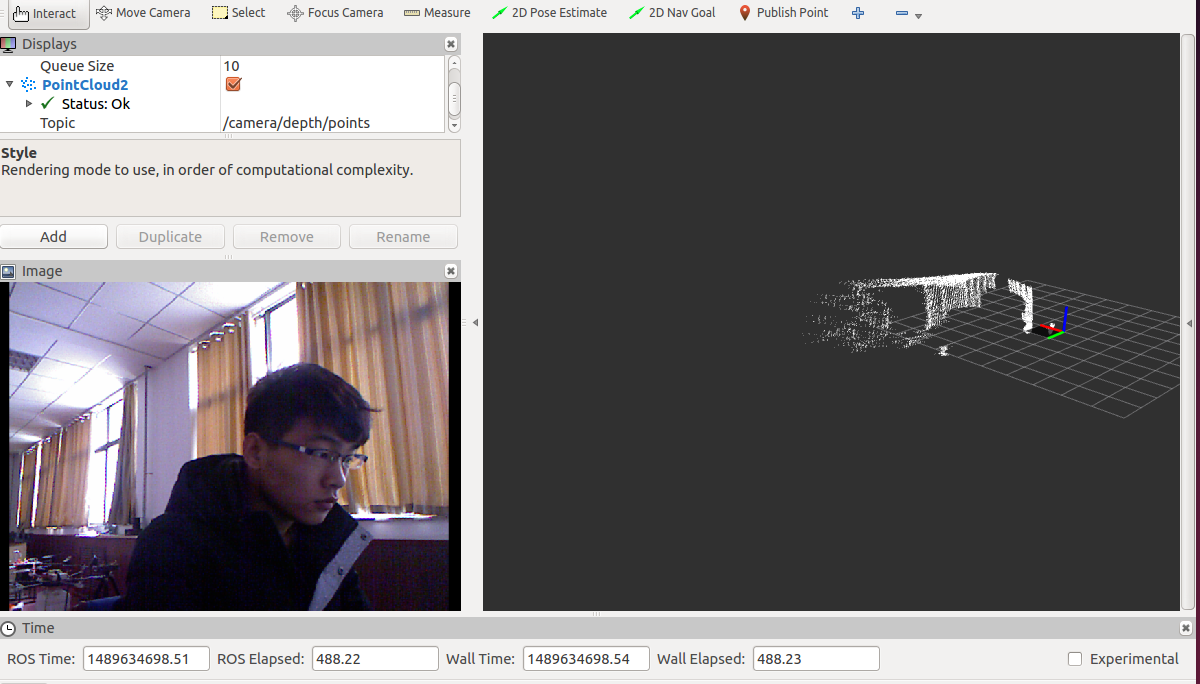
遠程運行
$ roslaunch openni_launch openni.launch
?
?


之基于客戶端的負載均衡)










代碼優化)


)


