標題:Learning Responsibility Allocations for Safe Human-Robot Interaction with Applications to Autonomous Driving
作者:Ryan K. Cosner, Yuxiao Chen, Karen Leung, and Marco Pavone
來源:2023 IEEE International Conference on Robotics and Automation (ICRA 2023)
這是佳佳怪分享的第5篇文章,僅限于分享,如有錯誤歡迎批評指正
摘要
駕駛員有責任采取合理的謹慎措施,避免與其他道路使用者發生碰撞。這種承擔的責任允許交互代理在沒有明確協調的情況下維護安全。因此,為了實現安全的自動駕駛汽車(AV)交互,AV必須了解他們維護安全的職責以及他們如何影響附近代理的安全。在這項工作中,我們試圖了解在多智能體環境中,自主智能體與人類同行互動時,責任是如何分擔的。我們引入了責任感知控制障礙函數(RA CBF),并提出了一種從數據中學習責任分配的方法。通過將安全關鍵控制和基于學習的技術相結合,RA CBF使我們能夠考慮場景相關的責任分配,并綜合安全高效的駕駛行為,而不會做出通常導致過度保守行為的最壞情況假設。我們使用真實世界的駕駛數據測試了我們的框架,并證明了它作為安全控制和不安全駕駛法醫分析工具的有效性。
圖1。在人類駕駛中,車輛可以表現出合理的注意義務。例如,尾隨車輛(綠色)負責不與前車相撞(藍色),并線車輛(橙色)遵守正式和非正式規則,以避免與車道上的車輛相撞(粉色)。我們如何確保自動駕駛汽車按照這種非正式的駕駛規則行動?

圖2。對于一系列速度和相對位置,學習的責任分配表面是可視化的。場景一:ego車(黃色)行駛在一條雙車道道路上。在所有情況下,γ(ego,x)>0表示保守駕駛的程度。通常,當另一個代理(紅色)在后面時,γ(ego,x)更大,表明在另一輛車后面行駛時責任增加。場景2:ego車輛停在一個四向交叉口,另一輛車(綠色)在它前面或后面(沒有藍色代理)。同樣,當綠色車輛在其前面時,ego車輛(黃色)比在其后面時更負責任。場景3:ego車輛(藍色)停在四向交叉口,另一輛車輛從上到下穿過(沒有綠色代理)。γ(ego,x)對于藍色車輛的所有位置和速度都是大的,這表明在這種情況下,ego 代理承擔的責任更大。
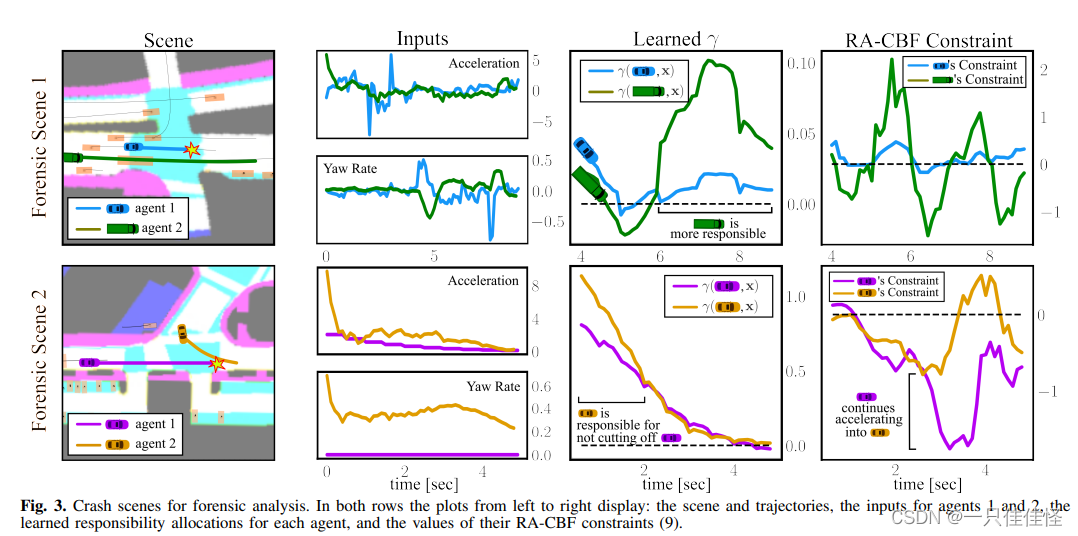
圖 3. 用于法醫分析的碰撞場景。兩行中從左到右的圖顯示了:場景和軌跡、代理 1 和代理 2 的輸入、每個代理的學習責任分配以及它們的 RA-CBF 約束值 (9)。學習到的每個代理的責任分配,以及它們的 RA-CBF 約束值 (9)。
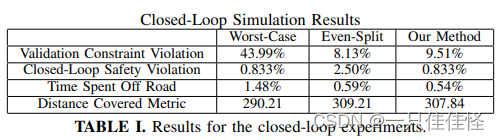
表 I. 閉環實驗結果
結論
我們提出了責任意識控制障礙函數(RA-CBFs)作為學習和合成安全負責駕駛行為的框架。RA-CBFs 旨在捕捉多個(人類)代理之間的非對稱責任分擔,我們提出了一種從數據中學習與上下文相關的責任分配的方法。然后,我們利用真實世界的駕駛數據證明了我們方法的有效性和實用性。這項工作為未來的發展指明了方向,包括將明確的交通規則納入我們的責任學習范式,比較不同地理區域的責任分配差異,以及探索人群導航等其他應用領域。



















