?
?
I2C
--INTER-IC串行總線的縮寫,是PHILIPS公司推出的芯片間串行傳輸總線。它以1根串行數據線(SDA)和1根串行時鐘線(SCL)實 現了雙工的同步數據傳輸。具有接口線少,控制方式簡化,器件封裝形式小,通信速率較高等優點。? I2C總線是雙向、兩線(SCL、SDA)、串行、多主控(multi-master)接口標準,具有總線仲裁機制,非常適合在器件之間進行近距離、非經常性的數據通信。在主從通信中,可以有多個I2C總線器件同時接到I2C總線 上,通過地址來識別通信對象。
IIC 接口的協議里面包括設備地址信息,可以同一總線上連接多個從設備,通過應答來互通數據及命令。但是傳輸速率有限,標準模式下可達到100Kbps,快速模式下可達到400Kbps(我們開發板一般在130Kbps),高速模式下達到4Mbps,不能實現全雙工,不適合傳輸很多的數據。
IIC總線是一個真正的多主機總線,總線上多個主機初始化傳輸,可以通過傳輸檢測和仲裁來防止數據被破壞 。
下來詳細了解IIC總線時序:
1.1 總線數據有效性
IIC總線是單工,因此同一時刻數據只有一個流向,因此采樣有效時鐘也是單一的,是在SCL時鐘的高電平采樣數據。
IIC總線上SDA數據在SCL時鐘低電平是可以發生變化,但是在時鐘高電平時必須穩定,以便主從設備根據時鐘采樣數據,如下圖:

1.2 總線空閑條件
IIC總線上設備都釋放總線(發出傳輸停止)后,IIC總線根據上拉電阻變成高電平,SDA SCL都是高電平。
?
1.3 總線數據傳輸起始和結束條件
IIC總線SCL高電平時SDA出現由高到低的跳變,標志總線上數據傳輸的開始條件
IIC總線SCL高電平時SDA出現由低到高的跳變,標志總線上數據傳輸的結束條件
?

1.4 總線數據傳輸順序以及ACK應答
IIC總線上數據傳輸室MSB在前,LSB在后,從示波器上看,從左向右依次讀出數據即可
IIC總線傳輸的數據不收限制,但是每次發到SDA上的必須是8位,并且主機發送8位后釋放總線,從機收到數據后必須拉低SDA一個時鐘,回應ACK表示數據接收成功,我們如果示波器上看到的波形就是每次9位數據,8bit+1bit ack。如下:
?
?
?
?
?
從機收到一字節數據后,如果需要一些時間處理,則會拉低SCL,讓傳輸進入等待狀態,處理完成,釋放SCL,繼續傳輸,如下:

?
1.5 總線讀寫時序
數據的傳輸在起始條件之后,發送一個7位的從機地址,緊接著第8位是數據方向(R/ W),0-表示發送數據(寫),1-表示接收數據(讀)。數據傳輸一般由主機產生的停止位(P)終止。但是如果主機仍希望在總線上通訊,它可以產生重復起始條件(Sr),和尋址另一個從機,而不是首先產生一個停止條件。在這種傳輸中,可能有不同的讀/寫格式結合。
IIC總線主設備讀寫從設備,一般都是與從設備的寄存器打交道,這個可以通過閱讀從設備的datasheet獲取。總線寫時序如下:
master start + master?addr|w + slave ack + master reg|w?+ slave ack + master data + slave ack + master restart。。master data + slave nack + master stop
總線讀時序如下:
master start + master addr|w + slave ack + master reg|w + slave ack + master restart + master addr|r + slave ack + slave data + master nack + master stop
總線讀時序與寫的不同之處在于讀需要2次傳輸才能完成一次讀取,首先要寫寄存器地址到從設備,其實是寫到了從設備的控制寄存器或者命令寄存器,從設備內部會根據這個地址來尋址所要操作的寄存器。
我在讀我們的bios和內核時發現,2者在總線讀時序上的實現不太一樣,在于第一次寄存器地址寫入后,一個發的是restart,一個發的是stop,然后再start開始讀取數據,示波器抓波形發現讀取數據都正確,說明這2種時序都是正確的。
IIC總線的讀寫時序比較固定,設備通信嚴格遵循協議,因此iIC總線設備驅動程序的編寫也就相對簡單一些。
主要應用的iIc總線設備有touchscreen rtc 外擴io等
http://blog.chinaunix.net/uid-21785445-id-2688689.html
IIC總線協議最重要的是起始信號,終止信號和應答信號。起始信號和終止信號由主機產生,應答信號是每次傳輸完成一個字節數據后必須有的,用于確認傳輸是否完成,主機向設備發一個字節數據后需要設備作應答,確認設備是否收到數據,主機收一個字節數據后需要向設備發一個應答信號,告訴設備數據是否收到。
(1) 起始信號:在時鐘線保持高電平期間,數據線出現由高電平向低電平變化時啟動I2C總線;
(2) 終止信號:在時鐘線保持高電平期間,數據線出現由低電平向高電平變化時停止I2C總線;
(3) 應答信號:應答信號在第9個時鐘位上出現,接收器輸出低電平為應答信號(A),輸出高電平則為非應答信號(/A)。
?
IIC數據傳輸:SCL為高電平時將SDA上數據發走,所以SDA上數據必須在SCL為高電平期間保持穩定,IIC總線首先傳輸的是數據最高位,最后是最低位。
?
設備地址:在起始信號后,需要向設備發送一個字節的設備地址,其中高七位為設備的地址,表示同哪個設備進行通信,最低位為數據傳輸方向,1表示讀(接收),0表示寫(發送)。
1.發送(寫)一個字節數據流程
a.起始信號
b.發送一個設備地址,這里為0,表示發送(寫)),設備應答
c.發送設備的寫的基地址,設備應答
d.發送數據到設備基地址,設備應答
e.停止信號
?
2.接收(讀)一個字節數據流程
a.起始信號
b.發送一個設備地址,這里為0,表示發送(寫)),設備應答
c.發送從設備要讀數據的基地址,設備應答
d.起始信號
e.發送一個設備地址,這里為1,表示接收(讀)),設備應答
f.從設備基地址處接收到一個字節的數據,主機應答
g.停止信號
?
從設備地址讀或寫一個字節數據后,設備讀寫地址會自動加1
3.連續發送(寫)多個字節數據
a.起始信號
b.發送一個設備地址,這里為0,表示發送(寫)),設備應答
c.發送設備的寫的基地址,設備應答
d.發送數據到設備基地址,設備應答
e.發送數據到設備(基地址+1),設備應答
f.發送數據到設備(基地址+2),設備應答
g.發送數據到設備(基地址+n),設備應答
h.停止信號
?
4.連續接收(讀)多個字節數據
a.起始信號
b.發送一個設備地址,這里為0,表示發送(寫)),設備應答
c.發送從設備要讀數據的基地址,設備應答
d.起始信號
e.發送一個設備地址,這里為1,表示接收(讀)),設備應答
f.從設備基地址處接收到一個字節的數據,主機應答
g.從設備(基地址處+1)接收到一個字節的數據,主機應答
h.從設備(基地址處+2)接收到一個字節的數據,主機應答
i.從設備(基地址處+n)接收到一個字節的數據,主機應答
j.停止信號
?
SPI
?? SPI 的通信原理很簡單,它需要至少4根線,事實上3根也可以。也是所有基于SPI的設備共有的,它們是SDI(數據輸入),SDO(數據輸出),SCK(時 鐘),CS(片選)。其中CS是控制芯片是否被選中的,也就是說只有片選信號為預先規定的使能信號時(高電位或低電位),對此芯片的操作才有效。這就允許 在同一總線上連接多個SPI設備成為可能。
接下來就負責通訊的3根線了。通訊是通過數據交換完成的,這里先要知道SPI是串行通訊協議,也就是說數據是一位一位的傳輸的。這就是SCK時鐘線存在的原因,由SCK提供時鐘脈沖,SDI,SDO則基于此脈沖完成數據傳輸。數據輸出通過SDO線,數據在時鐘上沿或下沿時改變,在緊接著的下沿或上沿被讀取。 完成一位數據傳輸,輸入也使用同樣原理。這樣,在至少8次時鐘信號的改變(上沿和下沿為一次),就可以完成8位數據的傳輸。
1) SCLK:串行時鐘,用來同步數據傳輸,由主機輸出;
?
2) MOSI:主機輸出從機輸入數據線;
?
3) MISO:主機輸入從機輸出數據線;
?
4) SS:片選線,低電平有效,由主機輸出。
?
在SPI總線上,某一時刻可以出現多個從機,但只能存在一個主機,主機通過片選線來確定要通信的從機。這就要求從機的MISO口具有三態特性,使得該口線在器件未被選通時表現為高阻抗。
?
?? ?要注意的是,SCK信號線只由主設備控制,從設備不能控制信號線。同樣,在一個基于SPI的設備中,至少有一個主控設備。
這樣傳輸的特點:這樣的傳輸方式有一個優點,與普通的串行通訊不同,普通的串行通訊一次連續傳送至少8位數據,而SPI允許數據一位一位的傳送,甚至允許暫停,因為SCK時鐘線由主控設備控制,當沒有時鐘跳變時,從設備不采集或傳送數據。也就是說,主設備通過對SCK時鐘線的控制可以完成對通訊的控制。
SPI還是一個數據交換協議:因為SPI的數據輸入和輸出線獨立,所以允許同時完成數據的輸入和輸出。
不同的SPI設備的實現方式不盡相同,主要是數據改變和采集的時間不同,在時鐘信號上沿或下沿采集有不同定義,具體請參考相關器件的文檔。
? ?? 概述
??? ??
?
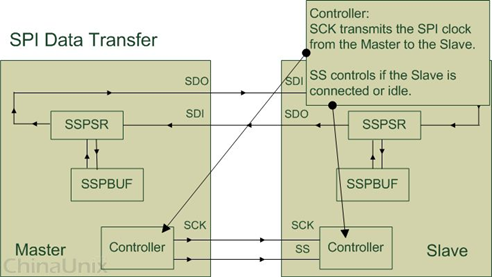
? ?? ?上圖只是對 SPI 設備間通信的一個簡單的描述, 下面就來解釋一下圖中所示的幾個組件(Module):
? ?? ? SSPBUF, Synchronous Serial Port Buffer, 泛指 SPI 設備里面的內部緩沖區, 一般在物理上是以 FIFO 的形式, 保存傳輸過程中的臨時數據;
? ?? ? SSPSR, Synchronous Serial Port Register, 泛指 SPI 設備里面的移位寄存器(Shift Regitser), 它的作用是根據設置好的數據位寬(bit-width) 把數據移入或者移出 SSPBUF;
? ?? ? Controller, 泛指 SPI 設備里面的控制寄存器, 可以通過配置它們來設置 SPI 總線的傳輸模式.
? ?? ???通常情況下, 我們只需要對上圖所描述的四個管腳(pin) 進行編程即可控制整個 SPI 設備之間的數據通信:
??? ???SCK, Serial Clock, 主要的作用是 Master 設備往 Slave 設備傳輸時鐘信號, 控制數據交換的時機以及速率;
? ?? ???SS/CS, Slave Select/Chip Select, 用于 Master 設備片選 Slave 設備, 使被選中的 Slave 設備能夠被 Master 設備所訪問;
? ?? ???SDO/MOSI, Serial Data Output/Master Out Slave In, 在 Master 上面也被稱為 Tx-Channel, 作為數據的出口, 主要用于 SPI 設備發送數據;
? ?? ???SDI/MISO, Serial Data Input/Master In Slave Out, 在 Master 上面也被稱為 Rx-Channel, 作為數據的入口, 主要用于SPI 設備接收數據;
? ?? ???SPI 設備在進行通信的過程中, Master 設備和 Slave 設備之間會產生一個數據鏈路回環(Data Loop), 就像上圖所畫的那樣, 通過 SDO 和 SDI 管腳, SSPSR 控制數據移入移出 SSPBUF, Controller 確定 SPI 總線的通信模式, SCK 傳輸時鐘信號.
?
SSPSR.
? ?? ?????
?
? ?? ???SSPSR 是 SPI 設備內部的移位寄存器(Shift Register). 它的主要作用是根據 SPI 時鐘信號狀態, 往 SSPBUF 里移入或者移出數據, 每次移動的數據大小由 Bus-Width 以及 Channel-Width 所決定.
? ?? ???Bus-Width 的作用是指定地址總線到 Master 設備之間數據傳輸的單位.
? ?? ???例如, 我們想要往 Master 設備里面的 SSPBUF 寫入 16 Byte 大小的數據: 首先, 給 Master 設備的配置寄存器設置 Bus-Width 為 Byte; 然后往 Master 設備的 Tx-Data 移位寄存器在地址總線的入口寫入數據, 每次寫入 1 Byte 大小的數據(使用 writeb 函數); 寫完 1 Byte 數據之后, Master 設備里面的 Tx-Data 移位寄存器會自動把從地址總線傳來的1 Byte 數據移入 SSPBUF 里; 上述動作一共需要重復執行 16 次.
? ?? ???Channel-Width 的作用是指定 Master 設備與 Slave 設備之間數據傳輸的單位. 與 Bus-Width 相似,??Master 設備內部的移位寄存器會依據 Channel-Width 自動地把數據從 Master-SSPBUF 里通過 Master-SDO 管腳搬運到 Slave 設備里的 Slave-SDI 引腳, Slave-SSPSR 再把每次接收的數據移入 Slave-SSPBUF里.
? ?? ???通常情況下, Bus-Width 總是會大于或等于 Channel-Width, 這樣能保證不會出現因 Master 與 Slave 之間數據交換的頻率比地址總線與 Master 之間的數據交換頻率要快, 導致 SSPBUF 里面存放的數據為無效數據這樣的情況.
?????? ?SSPBUF.
? ?? ?? ???
?
? ?? ?? ? 我們知道, 在每個時鐘周期內, Master 與 Slave 之間交換的數據其實都是 SPI 內部移位寄存器從 SSPBUF 里面拷貝的. 我們可以通過往 SSPBUF 對應的寄存器 (Tx-Data / Rx-Data register) 里讀寫數據, 間接地操控 SPI 設備內部的 SSPBUF.
? ?? ?? ? 例如, 在發送數據之前, 我們應該先往 Master 的 Tx-Data 寄存器寫入將要發送出去的數據, 這些數據會被 Master-SSPSR 移位寄存器根據 Bus-Width 自動移入 Master-SSPBUF 里, 然后這些數據又會被 Master-SSPSR 根據 Channel-Width 從 Master-SSPBUF 中移出, 通過 Master-SDO??管腳傳給 Slave-SDI 管腳,??Slave-SSPSR 則把從??Slave-SDI 接收到的數據移入 Slave-SSPBUF 里.??與此同時, Slave-SSPBUF 里面的數據根據每次接收數據的大小(Channel-Width), 通過 Slave-SDO 發往 Master-SDI, Master-SSPSR 再把從 Master-SDI 接收的數據移入 Master-SSPBUF.在單次數據傳輸完成之后, 用戶程序可以通過從 Master 設備的 Rx-Data 寄存器讀取 Master 設備數據交換得到的數據.
? ?? ?Controller.
? ?? ?? ???
?
? ?? ?? ? Master 設備里面的 Controller 主要通過時鐘信號(Clock Signal)以及片選信號(Slave Select Signal)來控制 Slave 設備. Slave 設備會一直等待, 直到接收到 Master 設備發過來的片選信號, 然后根據時鐘信號來工作.
? ?? ?? ? Master 設備的片選操作必須由程序所實現. 例如: 由程序把 SS/CS 管腳的時鐘信號拉低電平, 完成 SPI 設備數據通信的前期工作; 當程序想讓 SPI 設備結束數據通信時, 再把 SS/CS 管腳上的時鐘信號拉高電平.
?
?
?
Ps:暫時用不到的概念:?
CPOL: 時鐘極性, 表示 SPI 在空閑時, 時鐘信號是高電平還是低電平. 若 CPOL 被設為 1, 那么該設備在空閑時 SCK 管腳下的時鐘信號為高電平. 當 CPOL 被設為 0 時則正好相反.
? ?? ???CPHA: 時鐘相位, 表示 SPI 設備是在 SCK 管腳上的時鐘信號變為上升沿時觸發數據采樣, 還是在時鐘信號變為下降沿時觸發數據采樣. 若 CPHA 被設置為 1, 則 SPI 設備在時鐘信號變為下降沿時觸發數據采樣, 在上升沿時發送數據. 當 CPHA 被設為 0 時也正好相反.

![[置頂] 程序員編程生產力相差10倍意味著什么?](http://pic.xiahunao.cn/[置頂] 程序員編程生產力相差10倍意味著什么?)



![bzoj1679[Usaco2005 Jan]Moo Volume 牛的呼聲*](http://pic.xiahunao.cn/bzoj1679[Usaco2005 Jan]Moo Volume 牛的呼聲*)
場景管理)
)




![[C++]有關深復制與copy constructor的一些問題與實例](http://pic.xiahunao.cn/[C++]有關深復制與copy constructor的一些問題與實例)

 的排序算法)




