寫給自己看的學習記錄:
光具有波粒二象性,由此衍生出了幾何光學與衍射光學。在光學設計軟件中,最常用的判斷標準是查看點列圖的RMS半徑以及MTF圖的曲線,這兩者分別代表了兩種傳播性質的評價方式。
在剛接觸光學設計時,我誤認為評價標準是,將RMS半徑優化到小于像元尺寸的一半即可。認為點列圖好了,MTF肯定也好了,其實這是不對的,忽視了艾里斑是最小光斑的衍射理論。
后來才了解到,當點列圖小于艾里斑時,RMS半徑便不再可靠。用zemax軟件優化過程中,主要就是衍射與幾何相互對抗的過程,當RMS半徑值遠大于艾里斑半徑時,主要看點列圖;當點列圖滿足要求時,盡量把MTF曲線往衍射極限上優化。
艾里斑半徑R=1.22λF,由于λ是設計要求,那么F的選取就很重要,艾里斑過大或者過小都會帶來問題,一般來說,讓艾里斑半徑等于所選探測器的像元尺寸。
具體原因在
薇洛的打火機/衍射極限、MTF與相機分辨率(1)這篇博客里有很詳細的介紹。
大致如下:
在空間域中,成像系統的光斑是理想圖像與點擴散函數h(t)卷積的結果,而調制傳遞函數MTF就是系統點擴散函數h(t)經過Fourier變換的結果。
MTF是一個頻域的概念,代表不同頻率成分對比度的衰減,在光學評價方法中,它的單位是lp/mm,即每毫米/線對,代表每mm范圍內,有幾個明暗相間的正弦條紋。測試一個光學系統的MTF,就是測試對不同疏密(lp/mm為單位)的條紋的對比度衰減。(lp/mm通常是指像平面上的線對數。)
根據Shannon采樣定理,對于頻率為f 的信號,我們至少要用2f的頻率來采樣,才能把它恢復出來。從前面的敘述,我們知道,空間頻率一般是用探測器上每毫米線對數來表示的,我們至少需要兩個像素來采樣它,即兩個像素尺寸對應一個線對寬度。這也就是光學設計中奎奈斯特截止頻率計算公式的由來,即:
截止頻率=1/(2*像元尺寸)
那么回到最初的問題,艾里斑多大才與我們的像元尺寸相匹配,這決定了我們光學設計中F數的選擇。
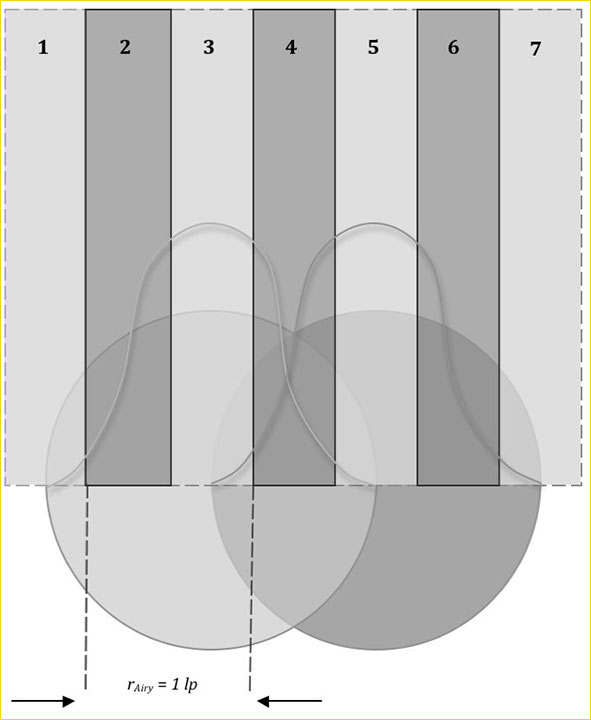
根據瑞利判據,當兩個相鄰的艾里斑距離為其半徑時,這兩個艾里斑勉強能夠分辨出來。
即一個線對寬度等于艾里斑的半徑,在這個頻率往上,系統是衍射受限的。哪怕沒有任何像差,MTF都很差,細節幾乎不可分辨。
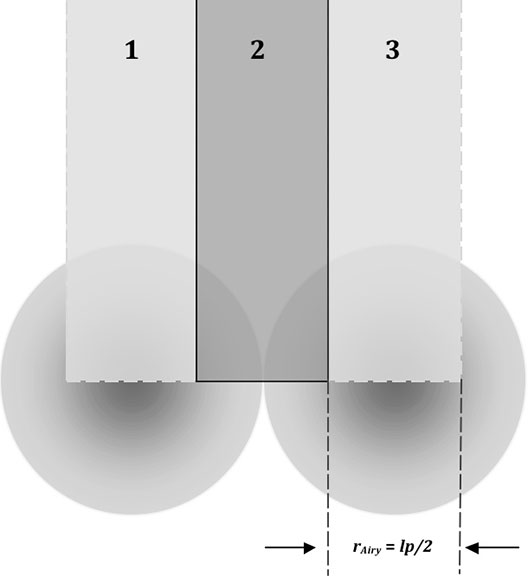
即艾里斑直徑最大不能超過兩個像元尺寸,否則該系統將無意義。
但是在設計中,沒必要做的這么極限,另外還要考慮公差對像質的影響。
所以,一般取線對寬度等于艾里斑的直徑,即一個像元尺寸等于艾里斑的半徑,此時截止頻率處衍射極限的MTF值約為0.5,是可以接受的。
?當然艾里斑可以更小,這樣截止頻率處的MTF值會更高,但是F數太大在光學設計中是件很頭疼的事,各種像差帶來的影響也很難使MTF接近衍射極限。
畢竟光學設計本身就是一件不斷取舍的工作。
所以我們在設計中,常取F數,使得艾里斑半徑等于像元尺寸大小即可。
注1:在紅外設計中,將點列圖優化到艾里斑內并將MTF曲線優化到接近衍射極限即可,不必太關注RMS半徑值。
注2:在需求中,F數是有要求的,比如紅外常要做到F1.0,反過來即可,即挑選合適的探測器。如果探測器也選定,且像元尺寸很小,那只能BIN了,犧牲分辨率。
注3:原文鏈接:https://blog.csdn.net/glorydream2015/article/details/44966369
(原文作者的一個例子,懶得打字,直接引用)
對于一個F數為2.8的鏡頭,假設我們用555nm的黃綠光來成像,像素大小做到多少合適呢?我們取線對寬度等于艾里斑的直徑大小作為依據,此時只考慮衍射的話,MTF約有0.5,也還算可以了。一個線對對應兩個像素,那么一個像素大小就相當于艾里斑的半徑,也就是1.22λF,算出來約為1.9微米。如果固定傳感器大小的話,那么它的像素數就是有上限的。到達一個限度,再增加像素數,就會導致像素小于1.9微米,再增加的像素已經提供不了新的信息了。
(批注:即艾里斑半徑大于一個像素,像素和像素之間是模糊的,如果BIN的話,其實還是分辨率變少,所以現在市場上的超高像素相機或者手機實在是噱頭,以致于只能宣傳BIN的好處。)
?









?))









)