目錄
- 相機標定
- 1.相機標定是什么
- 2.怎么使用halcon進行相機內外參標定?
- (1)搭建硬件
- 1.**相機連好電腦,用相機廠家軟件打開相機,檢查一下相機是否正常。**
- 2.**接下來使用halcon連接相機**
- (2)開始標定
- 1.**生成標定板參數文件**
- 2.**配置標定參數**
- 3.**開始標定相機**
- **總結提取標志點失敗原因
- 4.**得到標定參數**
- (3)使用標定出的數據矯正圖像
- 1**相機畸變矯正**
- 2**相機坐標系轉化成世界坐標系**
- 終于完事了!
|
如果大家看完這一篇文章后還想深入了解相機標定,可以參看文章《深入理解halcon相機標定》https://blog.csdn.net/cashmood/article/details/105221053
相機標定
這幾天一直在搞相機的標定。過程中遇到了許許多多的問題,為了讓廣大自動化行業的小白避免踩坑,用這個帖子總結一下相機的標定。接下來我就給大家介紹一下標定,側重點在怎么做。
1.相機標定是什么
首先鏡頭有畸變,也就是說照出的圖像與實際不符產生了形變。即使號稱無畸變的工業鏡頭也是有千分之幾的畸變率的。上個圖告訴大家畸變
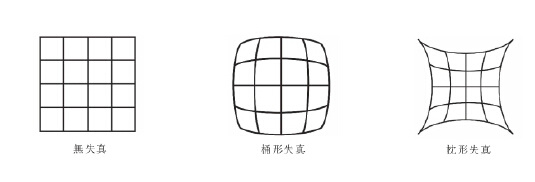
這個圖里,第一個圖就是我們相機下的真實的形狀,后邊兩個就是照出來有畸變的圖片。
其次鏡頭與相機無論你的機械結構精度多高,也不容易或者說沒辦法將相機安裝的特別正,那相機安裝不正也是會導致誤差的。大家想知道具體數學模型的話可以搜一下相機標定的理論方面的知識,我側重怎么做。
標定就是把上述兩個東西轉化成正常的。
2.怎么使用halcon進行相機內外參標定?
(1)搭建硬件
首先相機連接電腦,打開halcon,連接相機(這里不一定要連接相機,用相機照好的圖片也可以)。
這里說一下halcon連接相機,一般的相機都能用halcon連接,做標定很方便。給大家展示一下連接步驟。
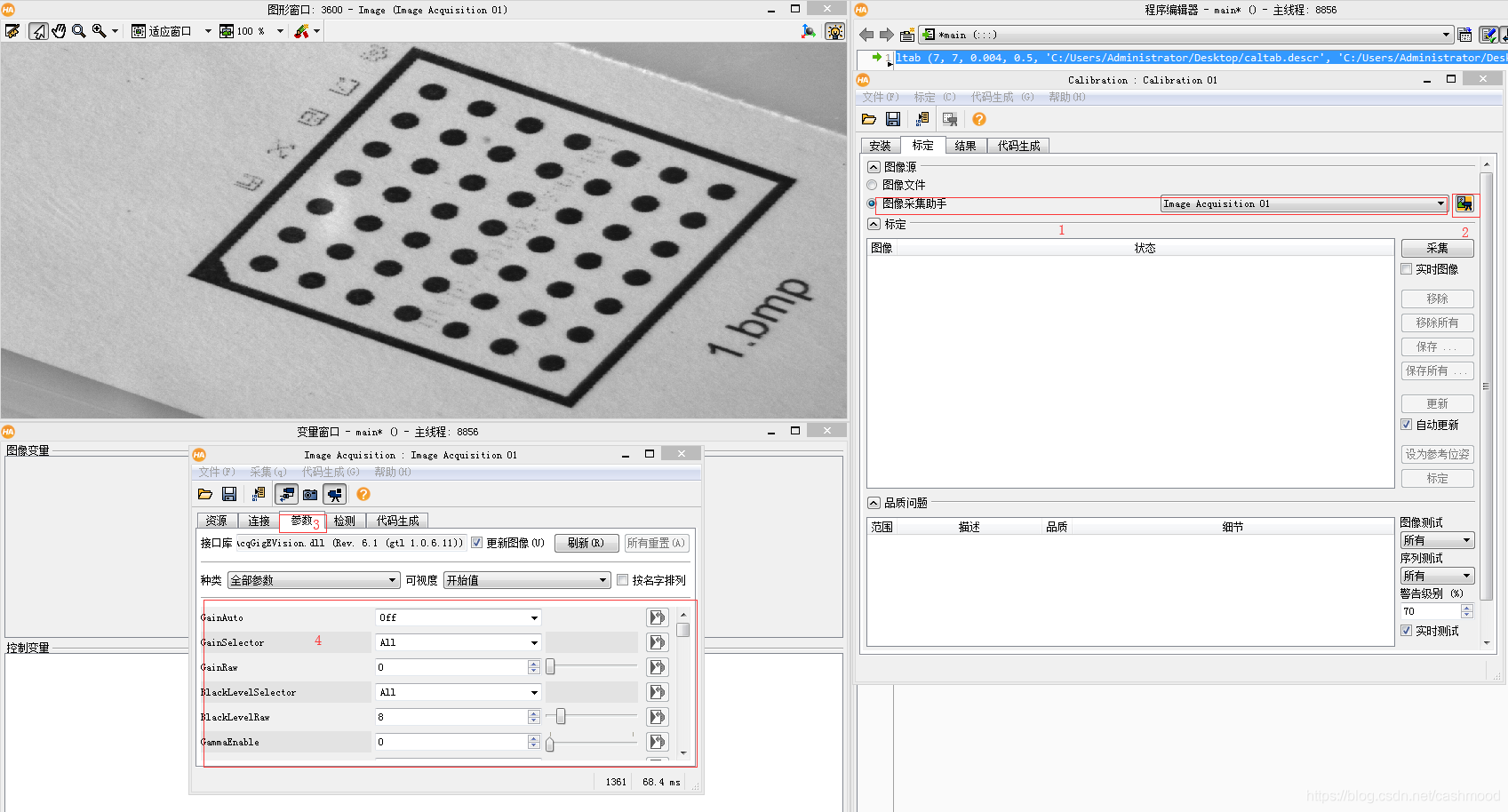
1.相機連好電腦,用相機廠家軟件打開相機,檢查一下相機是否正常。
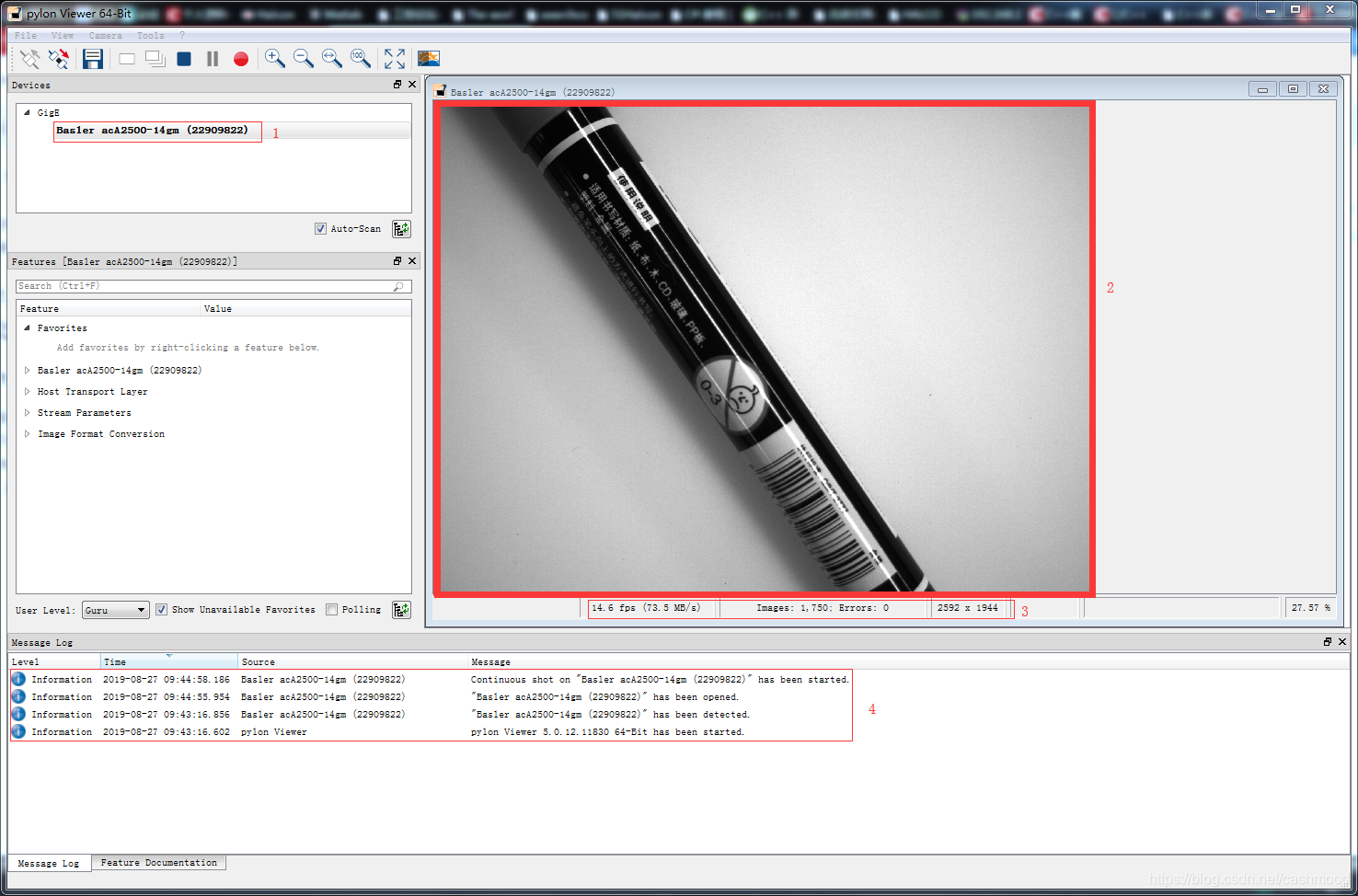
1框內是檢查相機是否能夠索引到,2框是看是否有圖像,3框是檢查幀率與帶寬相機尺寸,4框是檢查有無錯誤信息。
如果正常,用相機廠家軟件關閉相機并且斷開連接(這很重要,要不halcon連不上相機),記住停止采集不代表斷開連接!!!
把相機固定好
2.接下來使用halcon連接相機
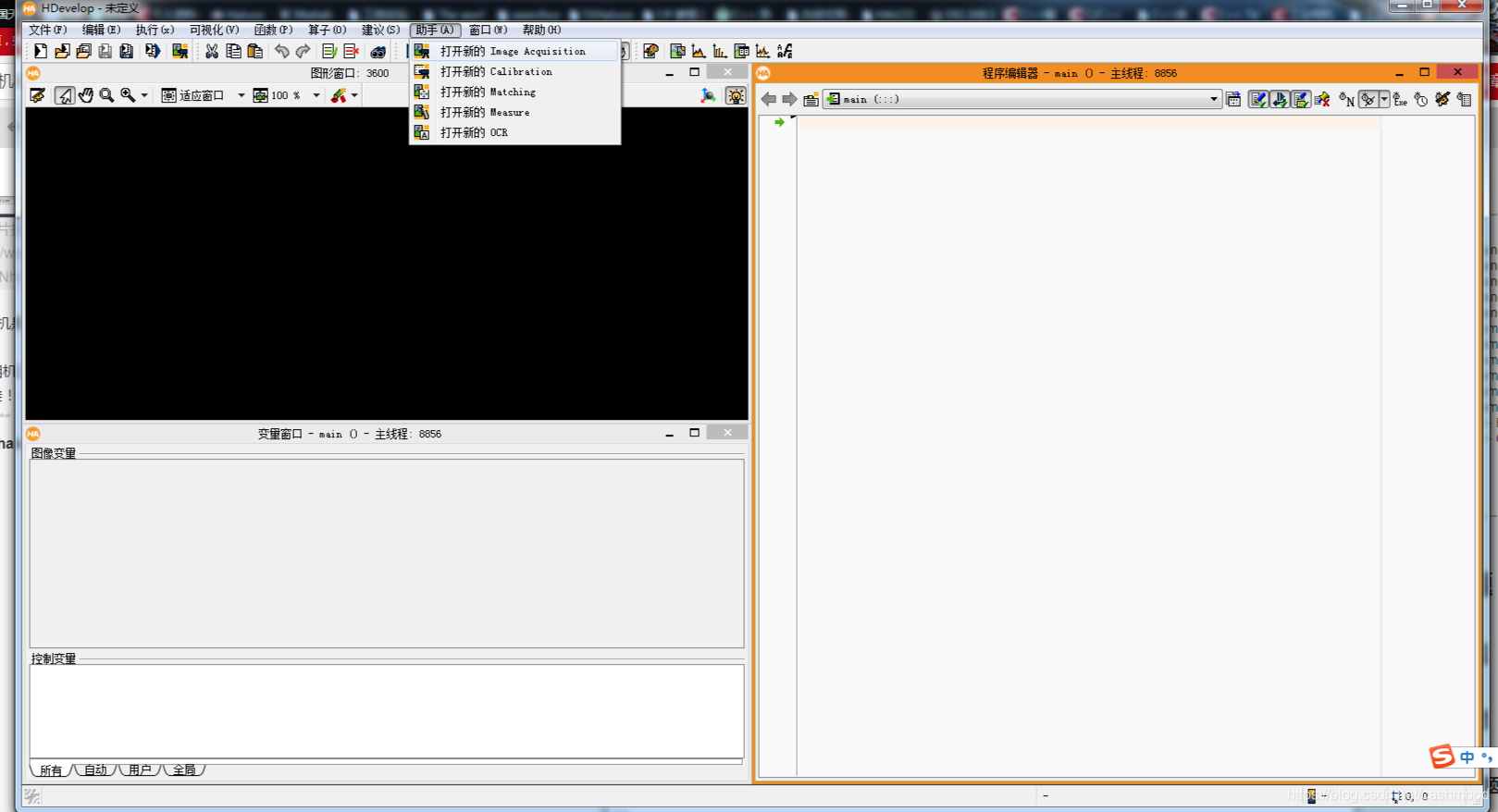
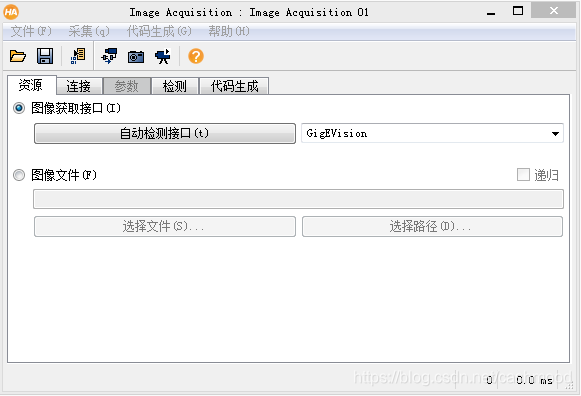
點擊助手,點擊打開新的ImageAcquisition。
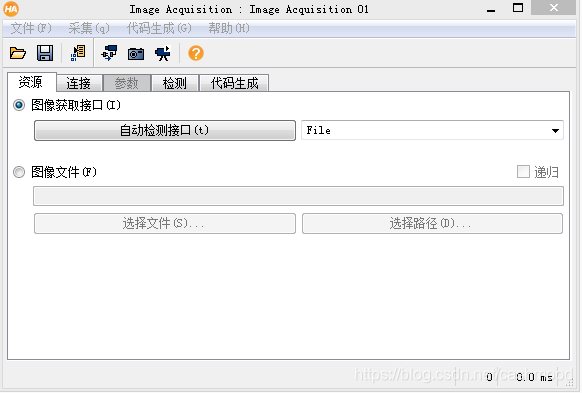
選擇圖像獲取接口,點擊自動檢測檢測相機類型。后邊的文本框里會顯示相機類型,我的是千兆網相機,所以顯示GigeVision。前邊大家用相機廠家的軟件打開了相機,那么說明大家都安裝了相機廠家halcon連接的sdk,所以接口是可以檢測到的,如果沒安裝相機廠家的軟件要安裝哦,不然連接不上。有啥不懂留言問我。
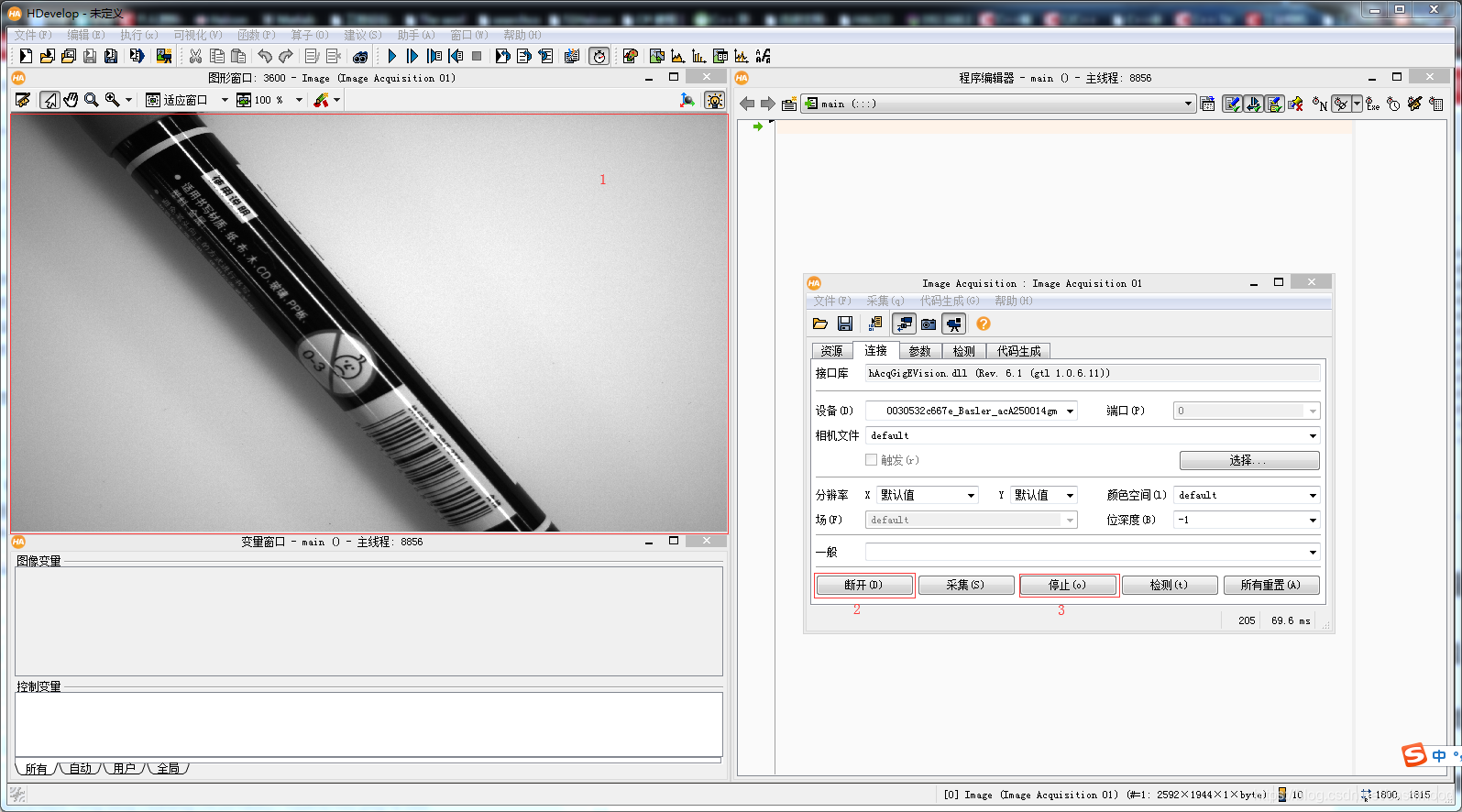
切換資源窗口到連接窗口
1就是咱們安裝相機廠家軟件之后的相機采集SDK包。
2選擇你要連接的設備
3點擊連接連接相機(如果有其他程序連著現在的相機,halcon是沒辦法連接上的,所以上邊讓大家記得斷開連接)
4點擊實時,實時顯示圖像

連接上相機并實時顯示
1圖像顯示區域
2斷開相機連接
3停止實時采集
進行完上述設置后停止實時采集,關閉ImageAcquisition窗口,不用保存,因為只要我們不關閉halcon這個圖像采集ImageAcquisition01都可以在助手里邊找到。

(2)開始標定
1.生成標定板參數文件
這個文件是描述你的標定板尺寸的,有了這個文件,halcon才知道你的標定板是多大的。
怎么生成呢,很簡單
為了讓大家方便復制,我把代碼貼出來:
gen_caltab (7, 7, 0.004, 0.5, ‘C:/Users/Administrator/Desktop/caltab.descr’, ‘C:/Users/Administrator/Desktop/caltab.ps’)
關于gen_caltab 算子詳細解釋傳送門點擊即可查看gen_caltab 解釋
2.配置標定參數
點擊助手,點擊打開新的Calibration。

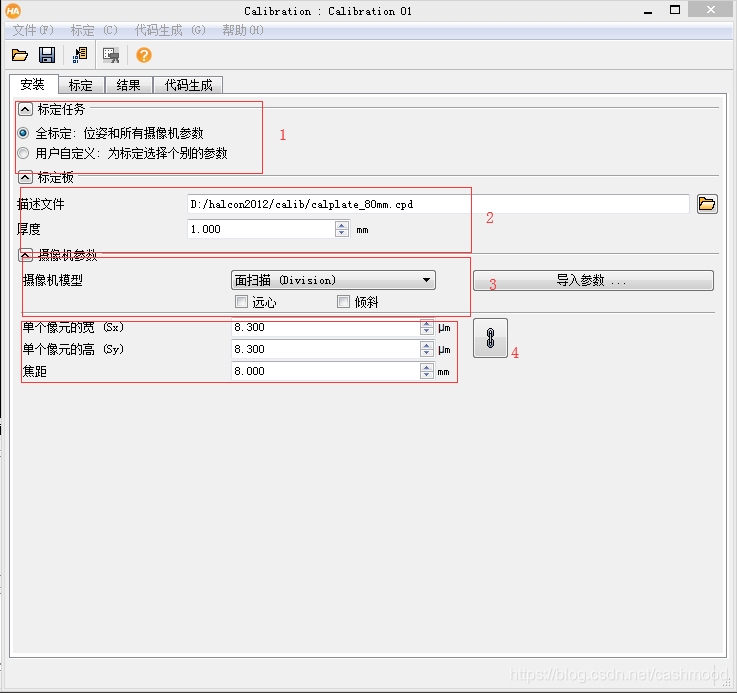
在安裝界面
1標定任務選擇全標定,內外參數全部標定。
2.標定板的描述文件選擇我們剛剛創建的描述文件。C:/Users/Administrator/Desktop/caltab.descr
厚度的話就填寫標定板厚度
3.攝像機參數
選擇攝像機模型,我的是面陣相機。鏡頭是遠心鏡頭就選擇遠心
4.像元的寬高填寫相機的像元尺寸,如果不知道去問相機廠家。焦距填寫鏡頭的焦距。
確保以上內容填寫正確!!!!
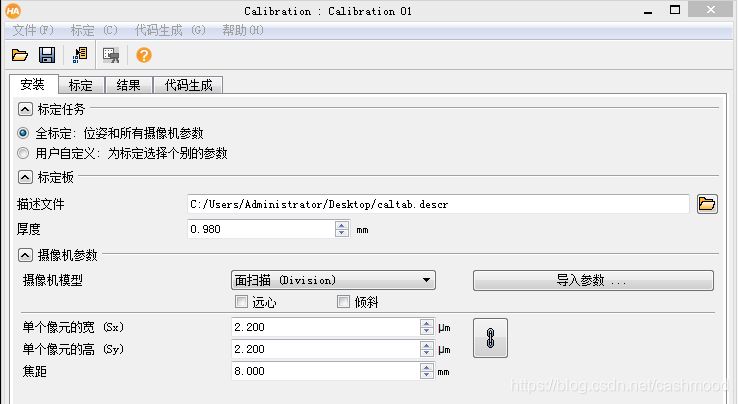
我的填寫好后:
3.開始標定相機
接下來切換到標定欄,
1圖像源選擇圖相采集助手
2點擊這個顯示圖相采集助手按鈕顯示圖像采集窗口
3點擊連接連接相機,點擊實時顯示圖像
4點擊圖像采集助手里的參數,調整焦距,調整光源,讓成像質量好一點。(不過曝、標定片黑色圓點與白色背景對比度大于100、對焦清晰)
完成調整后,關閉圖像采集助手的實時顯示。關閉圖像采集助手窗口。
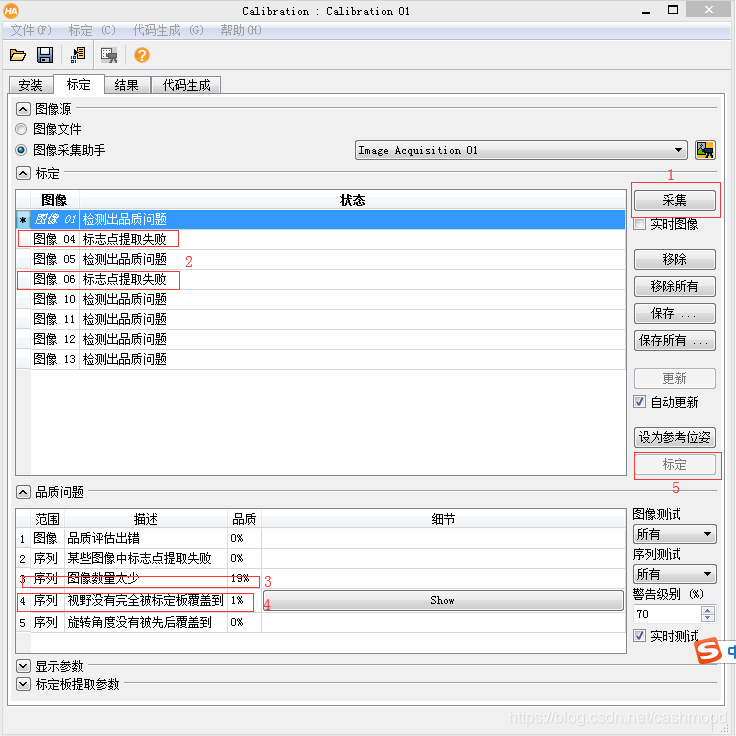
1點擊采集按鈕采集標定板圖像
2刪除標志點提取失敗的圖像
3圖像數量為3框不提示圖像數量太少為止
4可以識別的標定板圖像要把相機視野覆蓋完全,哪里沒有覆蓋到可以點擊show查看。
5點擊這個按鈕就可以出來標定數據了,但是如果有標志點提取失敗的圖像,或者圖像數量太少,或者視野沒有完全覆蓋到,那么這個標定按鈕會不可用,處理以上問題即可解決。
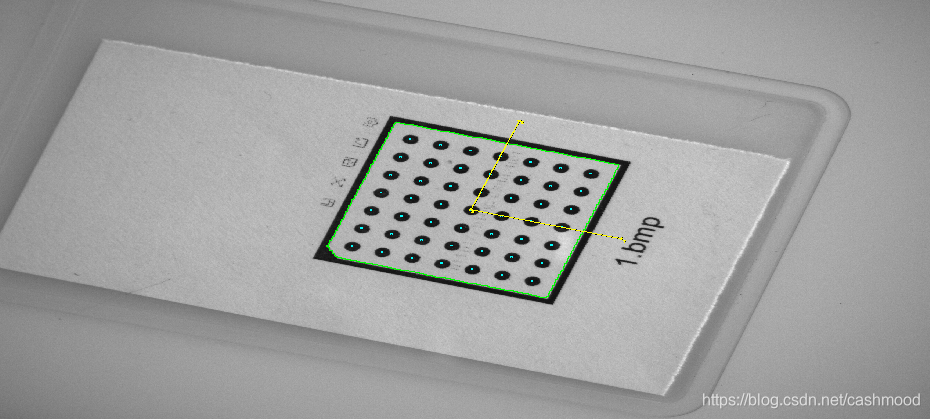
提取標志點成功圖片,有各個標志點與xyz坐標軸
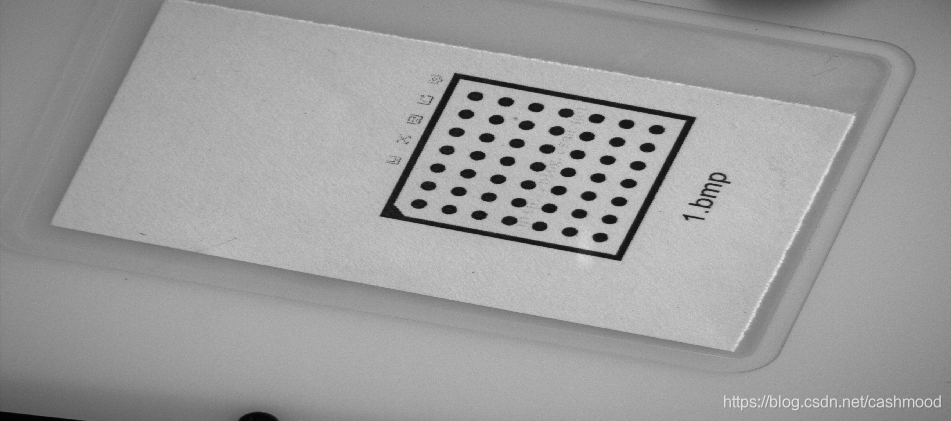
提取標志點失敗圖片,沒有各個標志點與xyz坐標軸
**總結提取標志點失敗原因
1、打光不均,有的地方亮有的地方暗
2、標定板的對比度不好,提取不出來標志點
3、標定文件讀取錯誤,標定板的參數相差太大
4、對焦不清晰
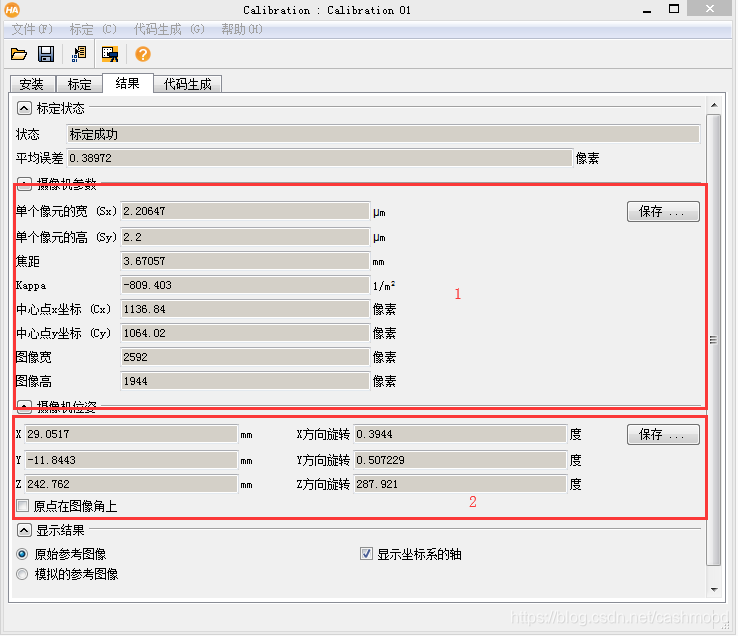
4.得到標定參數
點擊標定按鈕,自動切換到結果界面。

1相機內參
2相機外參
1點擊代碼生成
2選擇標定數據
3點擊插入代碼
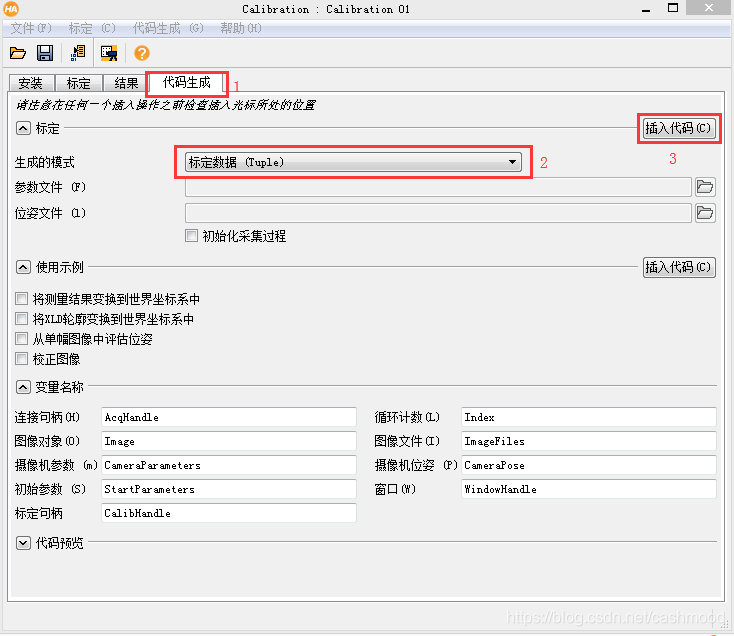
生成的代碼
CameraParameters為相機內參
CameraPose為相機外參

(3)使用標定出的數據矯正圖像
1相機畸變矯正
CameraParameters := [0.00367057,-809.403,2.20647e-006,2.2e-006,1136.84,1064.02,2592,1944]
CameraPose := [0.0290517,-0.0118443,0.242762,0.3944,0.507229,287.921,0]
CamParVirtualFixed:=CameraParameters
read_image (Image, ImageFiles[Index])
gen_radial_distortion_map(MapFixed,CameraParameters,CamParVirtualFixed,'bilinear')
map_image(Image,MapFixed,ImageRectifiedFixed)
ImageRectifiedFixed就是進行了畸變矯正的圖像
2相機坐標系轉化成世界坐標系
一、像素點相機坐標轉化成世界坐標系坐標
CameraParameters := [0.00367057,-809.403,2.20647e-006,2.2e-006,1136.84,1064.02,2592,1944]CameraPose := [0.0290517,-0.0118443,0.242762,0.3944,0.507229,287.921,0]read_image (Image, ImageFiles[Index])image_points_to_world_plane (CameraParameters, CameraPose, TmpCtrl_ImageRows, TmpCtrl_ImageColumns, 'mm', TmpCtrl_WorldX, TmpCtrl_WorldY)
二、圖片相機坐標轉化成世界坐標系
CameraParameters := [0.00367057,-809.403,2.20647e-006,2.2e-006,1136.84,1064.02,2592,1944]CameraPose := [0.0290517,-0.0118443,0.242762,0.3944,0.507229,287.921,0]read_image (Image, ImageFiles[Index])get_image_size (Image, Width, Height)相機視野寬度TmpCtrl_RectificationWidth := 79轉換成米單位TmpCtrl_RectificationWidth := TmpCtrl_RectificationWidth / 1000.0生成轉換矩陣gen_image_to_world_plane_map (TmpObj_RectificationMap, CameraParameters, CameraPose, Width, Height, Width, Height, TmpCtrl_RectificationWidth / Width, 'bilinear')轉換map_image (Image, TmpObj_RectificationMap, TmpObj_RectifiedImage)
注意:像素轉世界坐標系不用先進行畸變矯正,因為我們看到在轉換成世界坐標系時候用到了CameraParameters,已經考慮了相機的畸變。
終于完事了!
希望能夠幫到你哦,如果幫到了你記得給我點個贊,在CSDN頁面的右上角有個點贊標志。
有什么不懂得評論,我看到第一時間回復。
真心希望幫到大家。







)


與get()詳細解答(C#))








