參考:b站教學視頻FPGA:Cordic算法介紹與實現_嗶哩嗶哩_bilibili
? ? ? ?FPGA硬件實現加減法、移位等操作比較簡單,但是實現乘除以及函數計算復雜度高且占用資源多,常見的計算三角函數/平方根的求解方式有①查找表:先把函數對應結果存在存儲器中,根據輸入地址確定計算結果;②泰勒展開:把三角函數等函數求解展開成乘、除、加法進行求解。這兩種方法耗費ram/乘法器的資源巨大,為了僅用簡單的移位/加減法運算求解出復雜三角函數,提出了cordic算法。
????????cordic算法:coordinate rootation digital computer 坐標旋轉數字計算方法(硬件加速算法)。
類似于二分法,反復迭代,逐次逼近最終值,計算結果達到一定精度即可終止。與二分法不同的是,這里不是每次都改變二分之一的角度,而是改變二分之一的tan值,計算出對應角度,從而把復雜運算轉換為簡單的移位運算。
????????問題:已知某點坐標,①求旋轉到X軸需要的角度(向量模式);②求旋轉某角度后的坐標(旋轉模式); ???

對于旋轉模式:
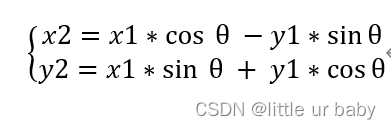
模塊輸入為:坐標(x,y),要旋轉的角度z。輸出為:新的坐標(x1,y1)
根據新坐標的表達式,當輸入x=1/k,y=0時,輸出新的坐標為(cosz,sinz),即求出了cosz和sinz的值。
對于向量模式:
模塊輸入為:坐標(x,y),要旋轉的角度z。輸出為:新點的模長和角度。
根據輸出的表達式,當輸入為x=1,z=0時,輸出為(x,y)的角度:arctan(y/x)。
除此(圓周旋轉系統)之外,還有線性旋轉、雙曲旋轉兩種系統(迭代方程不同),根據需要查看文獻了解。
cordic算法用途之一:求相位角!
算法原理:
已知點(x1,y1),求旋轉角度z后的坐標(x2,y2);





? ? ? ? ? ? ? ? ? ? ? ?
讓point1以θ1、θ2...... θn逐次逼近point2(此過程需調節正負號),直到誤差在可接受的范圍內:

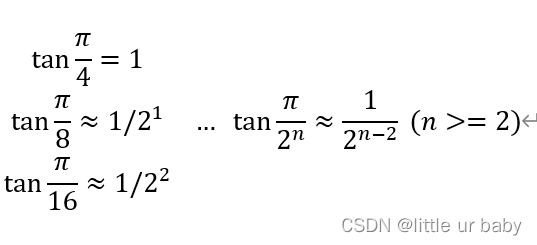
為了確保數值準確,即不取約等于,我們從函數值入手,只確保tan θn?=1/2n-2?,不去管θn的具體值,即存在

?求得如下角度:

后續的旋轉角度均按這個表格來旋轉:
 ?即把求解tanx函數轉化成了移位運算:
?即把求解tanx函數轉化成了移位運算:

求解坐標就轉化成了加減運算和移位運算
對于系數cos,當角度趨近于0時,cos值趨近于1,可以知道當迭代次數足夠高時,伸縮因子基本是一個常數。按照上面角度的表格,通過計算可知,當迭代次數大于16次時,伸縮因子固定為0.6073,所以我們可以設置迭代次數高于16,把伸縮因子固定為0.673,在所有運算結束后再乘上去。
相位誤差取決了迭代的次數,用上述表格,當迭代次數確定為16次時,求解的相位誤差小于等于18°。
假定每次坐標旋轉θ,且tanθn=1/2n-2?,則可以得出單次迭代的坐標公式(沒考慮伸縮因子):
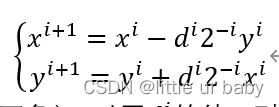
其中,di是旋轉方向的判定因子(正負)。對于di的值,引入角度累加器來判定,當累加的角度大于原始角度時,di為負,小于則di為正,
cordic算法即迭代算法(如以上迭代公式),通過多次迭代降低誤差,逼近目標值。
迭代有兩種模式:
①串行模塊:控制復雜,資源較少,速度較慢
②并行模塊:資源較多,速度較快,吞吐量大
atan函數:返回(-pi/2,pi/2)范圍的相位角;
atan2函數:返回(-pi,pi)范圍的相位角;
項目中用的是atan2函數。
quartus cordic ip核:
包含:
①sin cos
②atan2: 返回(-pi,pi)范圍的相位角;
③vector translate function:向量模式
④vector rotate function:旋轉模式
quartus 的cordic IP核用modelsim-se進行仿真時需要添加altera庫,暫時沒有進行仿真。(貌似如果用altera-modelsim就不需要再手動添加)
cordic算法的fpga實現:
?????? 求相位角:對于串行的方法來說,只需要根據迭代的表達式通過狀態機即可實現(線性序列機也可以,就是比較啰嗦,對于有相同迭代表達式的算法來說,狀態機方便)。





)









的場景)



+數據集+模型(五))