使用 COLMAP GUI 進行 SfM 和稀疏點云重建的步驟
1. 打開 COLMAP GUI
運行
colmap.bat,會彈出圖形界面。
2. 新建項目(或打開已有項目)
點擊菜單欄的 File > New Project,選擇一個空文件夾作為項目目錄(建議新建一個空目錄),把自己拍攝好的圖片放進去。
或者打開已有的數據庫文件和圖像文件夾路徑。
3. 特征提取
點擊菜單欄的Processing > Extract Features。
彈出對話框,通常默認參數即可(使用SIFT特征)。
點擊 extract 開始提取圖像特征。
完成后,狀態欄會顯示提取的特征數。完成后點×,關閉
4. 特征匹配
點擊菜單欄的 Processing?> Match Features。
默認用的是
Exhaustive Matcher(窮舉匹配),適合少量圖像。如果是連續視頻幀,可以選擇
Sequential Matcher。點擊 Start 進行特征匹配。
5. 運行稀疏重建(SfM)
點擊菜單欄的 Reconstruction > Start Reconstruction。
選擇你的數據庫文件和圖像路徑(通常已默認),創建或選擇一個空文件夾存放重建結果。
點擊 Run,COLMAP 會開始從匹配的特征估計相機位姿,構建稀疏點云。
進度和日志會顯示在界面下方。
6. 查看稀疏點云與相機軌跡
當稀疏重建完成后,界面左側會顯示重建出的相機位置和稀疏點云。
你可以通過鼠標旋轉、平移、縮放查看三維模型。
7. (可選)導出稀疏點云與相機參數
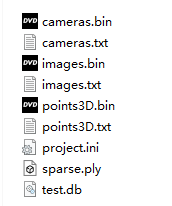
點擊菜單欄的 File > Export Model as。
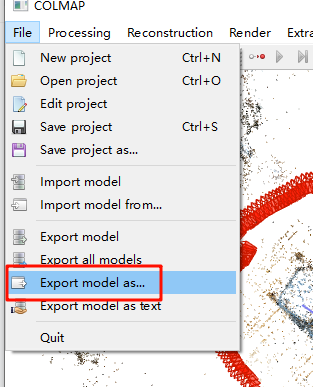

選擇導出格式(如PLY點云、TXT格式相機參數)。
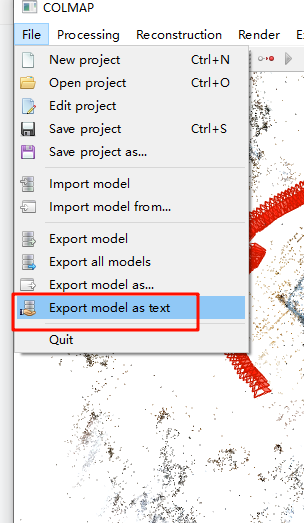
導出后,這些數據可用于NeRF等后續任務。
備注
對于大規模圖像集,建議先使用
Sequential Matcher進行匹配,避免窮舉匹配太慢。你也可以在菜單中的各個步驟調整參數,比如特征類型、匹配閾值等。
COLMAP支持的圖片格式很多,確保圖像清晰且重疊區域充足,有助于準確匹配。


)





)
:Tomcat高版本URL特殊字符限制問題解決方案(RFC 7230 RFC 3986))


)


)



,797. 所有可能的路徑)