????????時空注意力機制作為深度學習領域的關鍵技術,通過捕捉數據在時間和空間維度上的依賴關系,顯著提升了時序數據處理和時空建模能力。本文從理論起源、數學建模、網絡架構、工程實現到行業應用,系統拆解時空注意力機制的核心原理,涵蓋基礎理論推導、改進模型分析、分布式訓練技術及多領域實踐案例,為復雜時空系統的建模提供完整技術路線。
一、理論基礎:從注意力到時空建模
1.1 注意力機制的起源與發展
????????你是否好奇過,人類的注意力是如何高效處理繁雜信息的?
????????在機器學習中,自注意力機制通過計算輸入數據與模型內部組件的相似度,來決定哪些信息對當前任務更重要。這就像是給計算機賦予了“選擇性傾聽”的能力。
????????具體來說,自注意力機制包括兩個主要步驟:“鍵-值”匹配和“加權求和”。在“鍵-值”匹配中,模型會計算輸入數據中每個元素與自身表示的相似度。而“加權求和”則是根據這些相似度為每個元素分配權重,并計算最終的輸出表示。
1.1.1 注意力機制的生物學啟發
????????人類視覺系統通過選擇性關注局部區域獲取關鍵信息,減少信息處理負擔。借鑒這一原理,深度學習中的注意力機制通過權重分配實現對輸入的選擇性聚焦。
????????注意力機制最初是在transformer架構中被使用的。以下是transformer架構圖。
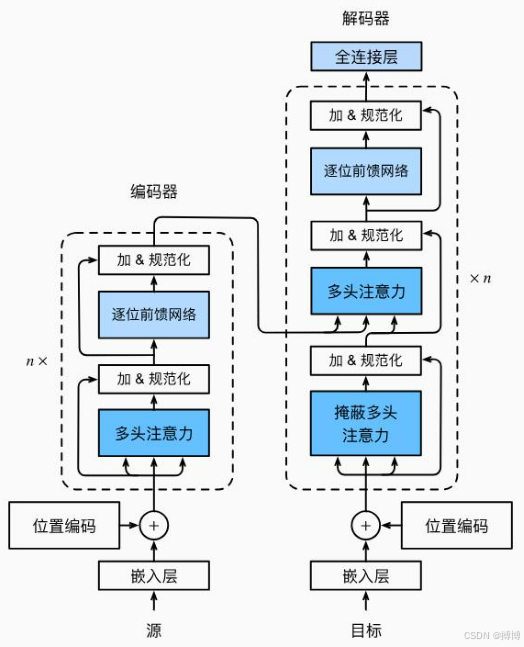
1.1.2 傳統注意力機制的數學表達
????????標準注意力函數可表示為查詢(Query)、鍵(Key)和值(Value)的映射:
![]()
????????其中,
(1)![]() 為查詢矩陣
為查詢矩陣
(2)![]() 為鍵矩陣
為鍵矩陣
(3)![]() 為值矩陣
為值矩陣
(4)![]() 為縮放因子,防止內積值過大導致梯度消失
為縮放因子,防止內積值過大導致梯度消失
注意力實現過程的詳細描述,如下圖:
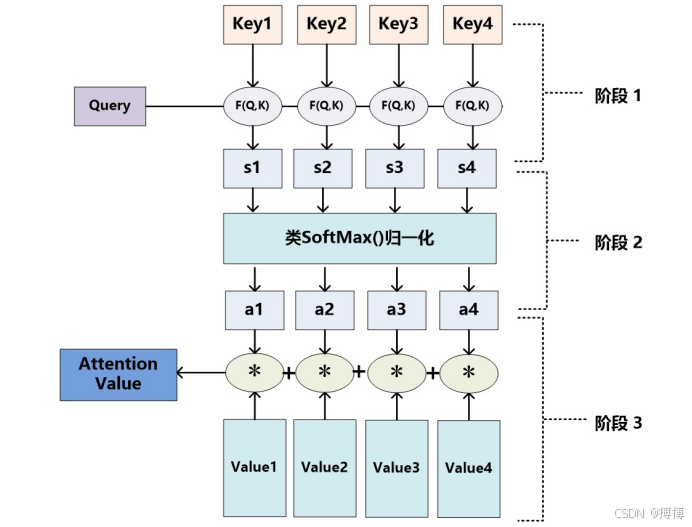
(1)第1階段:注意力匯聚
(2)第2階段:SoftMax()歸一化
(3)第3階段:加權求和
總結流程如下:
1.2 時空注意力的核心創新
1.2.1 時空維度的聯合建模
????????傳統序列模型(如 LSTM)僅處理時間維度依賴,而時空注意力同時捕獲:
(1)空間依賴:同一時刻不同位置之間的關系(如交通網絡中相鄰路口的流量關聯)
(2)時間依賴:不同時刻同一位置或不同位置之間的關系(如天氣系統的演變)
1.2.2 時空注意力的分類
????????根據建模方式不同,可分為:
(1)顯式時空注意力:分別設計時間和空間注意力模塊,再融合結果
(2)隱式時空注意力:通過統一模型同時捕獲時空依賴
(3)分解式時空注意力:將時空注意力分解為多個子注意力,如時空分解自注意力(STSA)
1.3 時空注意力的數學基礎
1.3.1 時空注意力的通用形式
????????定義時空輸入序列![]() ,其中?T?為時間步,N?為空間節點數,D?為特征維度。時空注意力輸出可表示為
,其中?T?為時間步,N?為空間節點數,D?為特征維度。時空注意力輸出可表示為![]()
????????其中注意力權重由時空上下文決定:

1.3.2 時空分解注意力機制
????????將時空注意力分解為時間注意力和空間注意力的組合:
(1)時間注意力:![]()
(2)空間注意力:![]()
(3)組合權重:![]()
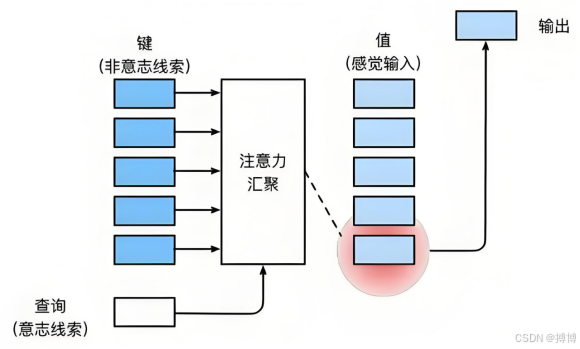
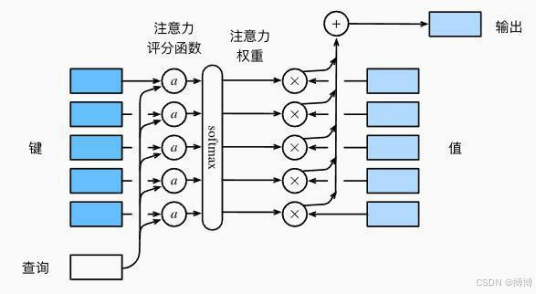
????????其中的時間和空間注意力分別進行如下操作,計算注意力匯聚匯聚的輸出計算成為值的加權和,其中a表示注意力評分函數。由于注意力權重是概率分布,因此加權和其本質上是加權平均值。
二、數學基礎:從基礎模型到擴展變體
2.1 時空自注意力機制
2.1.1 標準時空自注意力
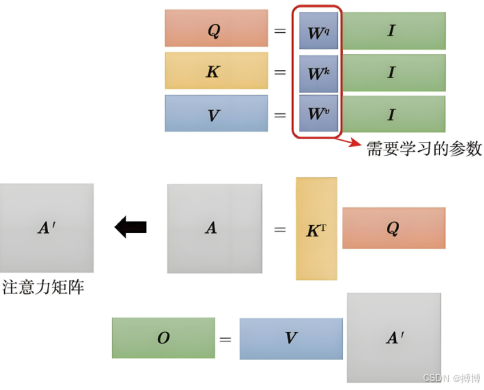
????????將自注意力機制擴展到時空域,查詢、鍵、值均來自同一輸入:

其中為可學習權重矩陣。以下從矩陣乘法的角度理解注意力。
2.1.2 時空位置編碼
????????為保留時空位置信息,引入時空位置編碼:
![]()
????????其中位置編碼可采用正弦余弦函數或可學習參數:
![]()
2.2 時空圖注意力網絡
2.2.1 圖結構表示時空關系
????????將時空數據建模為圖?G = (V, E),其中節點?V?表示空間位置,邊?E?表示時空關系。時空圖注意力機制可表示為:
????????其中為節點?i?和?j?之間的注意力權重,由時空特征決定。
2.2.2 時空圖卷積
????????結合圖卷積與注意力機制,時空圖卷積可表示為:

????????其中?為歸一化鄰接矩陣,
為可學習參數。
2.3 時空因果注意力
2.3.1 因果掩碼機制
????????為保證時序預測的因果性,在計算注意力權重時屏蔽未來信息:

????????其中?M?為掩碼矩陣,使?t?時刻的預測僅依賴于?t?及之前的信息。
2.3.2 因果卷積與注意力結合
????????將因果卷積與注意力機制結合,增強局部時序建模能力:
![]()
三、網絡結構:從單元設計到系統架構
3.1 時空注意力單元設計
3.1.1 時空門控注意力單元
????????結合 LSTM 的門控機制與注意力機制,設計時空門控注意力單元:
(1)遺忘門:![]()
(2)輸入門:![]()
(3)細胞狀態更新:![]()
(4)輸出門:![]()
????????有關LSTM的詳細內容,可以看我文章:長短期記憶網絡(LSTM)深度解析:理論、技術與應用全景-CSDN博客?
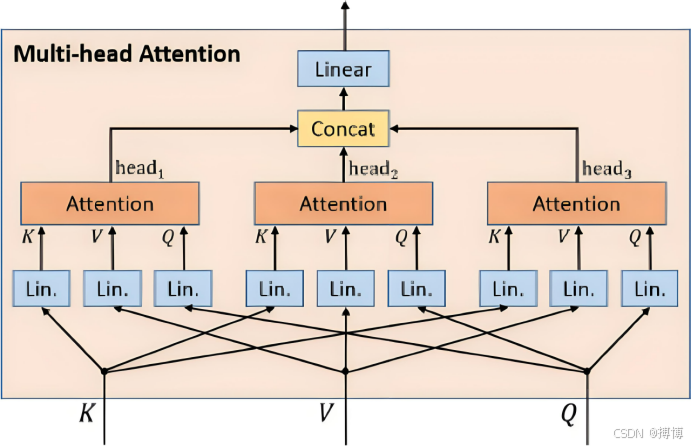
3.1.2 時空多頭注意力
????????將多頭注意力機制擴展到時空域:
![]()
????????其中每個頭計算獨立的時空注意力:
![]()
????????以下是多頭注意力的示意圖:
3.2 典型時空注意力網絡架構
3.2.1 時空 Transformer(ST-Transformer)
將 Transformer 擴展到時空域,包含:
(1)時空編碼器:由多個時空注意力層和前饋網絡組成
(2)時空解碼器:類似編碼器,但加入因果掩碼
(3)時空位置編碼:同時編碼時間和空間位置信息
3.2.2 時空圖神經網絡(ST-GNN)
結合圖神經網絡與注意力機制,典型架構:
(1)空間圖注意力層:捕獲同一時刻不同位置間的關系
(2)時間注意力層:捕獲不同時刻間的關系
(3)時空融合層:整合時空信息生成預測
3.3 動態時空注意力機制
3.3.1 自適應時空權重
根據輸入動態調整時間和空間注意力的權重:
![]()
![]()
3.3.2 層次化時空注意力
構建多層次時空注意力,逐步捕獲從局部到全局的時空依賴:
(1)局部時空層:關注短時間窗口內的局部空間關系
(2)全局時空層:捕獲長時間范圍的全局空間關系
(3)融合層:整合不同層次的時空信息
四、實現技術:從訓練到部署的工程實踐
4.1 訓練優化技術
4.1.1 初始化策略
(1)時空位置編碼初始化:使用正弦余弦函數或高斯分布隨機初始化
(2)注意力權重初始化:使用Xavier或Kaiming初始化,確保梯度穩定
4.1.2 優化器選擇
(1)Adam優化器:默認參數,
,
(2)學習率調度:使用預熱(Warmup)策略,先線性增加學習率,再按余弦函數衰減
(3)梯度裁剪:設置梯度范數閾值(如 1.0),防止梯度爆炸
4.2 分布式訓練技術
4.2.1 時空數據并行
將時空數據按時間或空間維度分片,分配到不同計算設備:
(1)時間并行:將長序列分割為多個短序列,并行處理
(2)空間并行:將空間區域分割,每個設備處理一部分區域
4.2.2 模型并行
將大型時空注意力模型拆分到多個設備:
(1)層間并行:不同層分布在不同設備
(2)層內并行:同一層的不同部分分布在不同設備
4.3 硬件加速與框架優化
4.3.1 時空注意力的 GPU 優化
(1)時空矩陣乘法優化:針對時空數據特點,優化矩陣乘法內核
(2)時空緩存機制:利用GPU共享內存,緩存頻繁訪問的時空數據
4.3.2 主流框架實現
| 框架 | 時空注意力實現特點 | 適用場景 |
| PyTorch | 靈活的動態圖,支持自定義時空注意力模塊 | 研究與快速原型開發 |
| TensorFlow | 高效的分布式訓練,支持時空模型部署 | 工業級應用開發 |
| MXNet | 自動優化時空計算圖,支持邊緣設備部署 | 移動端與邊緣計算 |
五、應用示例:多領域時空問題解決方案
5.1 交通流量預測:以城市路網為例
5.1.1 問題定義
基于歷史交通流量數據,預測未來15分鐘至1小時的城市路網流量。
5.1.2 數據預處理
(1)路網建模:將城市道路抽象為圖結構,節點為路口,邊為道路段
(2)時空數據構建:每個時間步的節點特征包括車流量、速度、占有率等
(3)序列構造:使用滑動窗口生成訓練樣本,窗口大小為 12(對應3小時)
5.1.3 模型架構(STGAT)
python代碼示例:
import torch ?import torch.nn as nn ?import torch.nn.functional as F ?class SpatioTemporalAttention(nn.Module): ?def __init__(self, in_channels, num_nodes, time_steps): ?super().__init__() ?self.spatial_attn = nn.Sequential( ?nn.Linear(in_channels, 128), ?nn.ReLU(), ?nn.Linear(128, num_nodes) ?) ?self.temporal_attn = nn.Sequential( ?nn.Linear(in_channels, 128), ?nn.ReLU(), ?nn.Linear(128, time_steps) ?) ?self.gate = nn.Sequential( ?nn.Linear(in_channels*2, 1), ?nn.Sigmoid() ?) ?def forward(self, x): ?# x: [batch_size, time_steps, num_nodes, in_channels] ?batch_size, time_steps, num_nodes, in_channels = x.shape ?# 空間注意力 ?spatial_input = x.permute(0, 1, 3, 2).reshape(-1, in_channels) ?spatial_attn = self.spatial_attn(spatial_input).reshape( ?batch_size, time_steps, num_nodes, num_nodes) ?spatial_attn = F.softmax(spatial_attn, dim=-1) ?# 時間注意力 ?temporal_input = x.reshape(-1, in_channels) ?temporal_attn = self.temporal_attn(temporal_input).reshape( ?batch_size, time_steps, num_nodes, time_steps) ?temporal_attn = F.softmax(temporal_attn, dim=-1) ?# 時空融合 ?spatial_context = torch.matmul(spatial_attn, x) ?temporal_context = torch.matmul(temporal_attn.permute(0, 1, 3, 2), x) ?# 門控機制 ?gate_input = torch.cat([spatial_context, temporal_context], dim=-1) ?gate = self.gate(gate_input) ?# 融合輸出 ?output = gate * spatial_context + (1 - gate) * temporal_context ?return output ?
5.1.4 實驗結果
(1)數據集:PeMSD7(包含洛杉磯高速公路7號線上228個傳感器的交通數據)
(2)評估指標:MAE=3.24,RMSE=5.42,較傳統LSTM模型提升23%
5.2 視頻理解:動作識別應用
5.2.1 問題定義
基于視頻序列,識別其中的人類動作(如跑步、跳躍、握手等)。
5.2.2 模型架構(TSM-Transformer)
(1)時空特征提取:使用TSN(Temporal Segment Network)提取幀級特征
(2)時空注意力層:捕獲幀間和幀內的時空依賴關系
(3)分類層:基于時空特征進行動作分類
5.2.3 關鍵技術
(1)時間移位模塊(TSM):通過輕量級時間移位操作,實現高效時序建模
(2)時空相對位置編碼:同時編碼時間和空間的相對位置關系
5.3 氣象預測:基于衛星圖像的降水預測
5.3.1 數據處理
(1)輸入:多通道衛星圖像序列(紅外、可見光等波段)
(2)輸出:未來 6-24 小時的降水概率分布
5.3.2 模型設計(ST-UNet)
(1)時空編碼器:使用 3D 卷積和時空注意力捕獲氣象系統的時空演變
(2)時空解碼器:逐步恢復空間分辨率,生成降水預測圖
(3)時空注意力融合:在跳躍連接中應用時空注意力,保留多尺度時空特征
5.4 無線傳感網絡:事件檢測與定位
5.4.1 問題定義
基于分布式傳感器網絡的時空數據,檢測異常事件(如地震、火災)并定位。
5.4.2 模型架構(ST-GNN)
(1)傳感器節點建模:將每個傳感器視為圖中的節點
(2)時空圖構建:節點間的邊權重隨時間動態變化
(3)時空注意力機制:捕獲傳感器間的時空依賴關系,增強事件檢測能力
六、挑戰與未來方向
6.1 當前技術瓶頸
(1)計算復雜度:全連接的時空注意力機制在大規模時空數據上計算開銷巨大
(2)長序列建模:隨著序列長度增加,注意力機制的性能顯著下降
(3)可解釋性不足:時空注意力權重難以直觀解釋,限制了在關鍵領域的應用
6.2 前沿研究方向
(1)稀疏時空注意力:通過稀疏化技術降低計算復雜度,如Linformer、Performer等
(2)因果時空建模:引入因果推斷理論,增強時空模型的因果解釋能力
(3)時空元學習:快速適應新的時空分布,減少對大量標注數據的依賴
(4)量子時空注意力:探索量子計算加速時空注意力計算,處理超大規模時空數據
七、結語
????????時空注意力機制通過同時捕獲時間和空間維度的依賴關系,為復雜時空系統的建模提供了強大工具。從理論推導到工程實現,時空注意力的發展印證了深度學習中“注意力機制”范式的有效性 —— 通過聚焦關鍵時空信息,模型能夠更高效地處理和理解動態變化的世界。未來,隨著理論的完善和技術的融合,時空注意力機制將在自動駕駛、智慧城市、氣象預測等領域發揮更大作用,推動人工智能從感知智能向決策智能邁進。









)



:HTTP服務器開發實踐)




)
