機械超材料是一種結構化的宏觀結構,其幾何排列方式具有獨特的幾何結構,從而具有獨特的力學性能和變形模式。超材料的宏觀特性取決于中觀尺度晶胞的具體形狀、尺寸和幾何取向。經典的結構化晶胞,例如以拉伸為主的八面體桁架單元和以彎曲為主的開爾文晶格,已在諸多應用領域中得到探索,包括超輕系統、極端能量耗散和晶格斷裂表征。手性,一個在多個領域中確立的概念,也已被用于創建材料系統。由手性晶胞組成的超材料能夠實現獨特的變形效應,例如應變與扭轉的耦合。上述機械超材料假設所有晶胞之間存在完美的剛性連接;因此,變形運動學保持在幾何線性區域內。相比之下,可重構組件,例如受折紙和剪紙啟發的超材料,將運動擴展為有限變形,適用于涉及形狀變形的應用。三維可重構性是通過將單元與沿平面內和平面外方向排列的柔性鉸鏈連接起來實現的。然而,柔性連接的幾何非線性為超材料引入了多個自由度,而超材料依賴于集成系統或外部刺激來驅動。此外,大多數可重構超材料側重于單軸變形下的有效物理特性。具有易于驅動的單自由度機制的多模態組件可以促進材料和機器人功能之間的協同作用,正如本文所探索的那樣。本文亮點1. 本工作建立了模塊化手性超材料,由拉脹平面鑲嵌和受折紙啟發的柱狀陣列組成,并具有解耦驅動。在單自由度驅動下,該組件可在0°至90°之間扭轉,平面內收縮高達25%,平面外收縮超過50%。2. 通過實驗和模擬,表明該組件的變形包括由旋轉方形鑲嵌主導的平面內扭轉和收縮,以及由管狀Kresling折紙陣列主導的平面外收縮。3. 演示了兩種不同的驅動條件:自由平移下的扭轉和自由旋轉下的線性位移。該超材料基于高度模塊化的組件構建,可實現可重新編程的不穩定性、局部手性控制、可調的負載能力和可擴展性。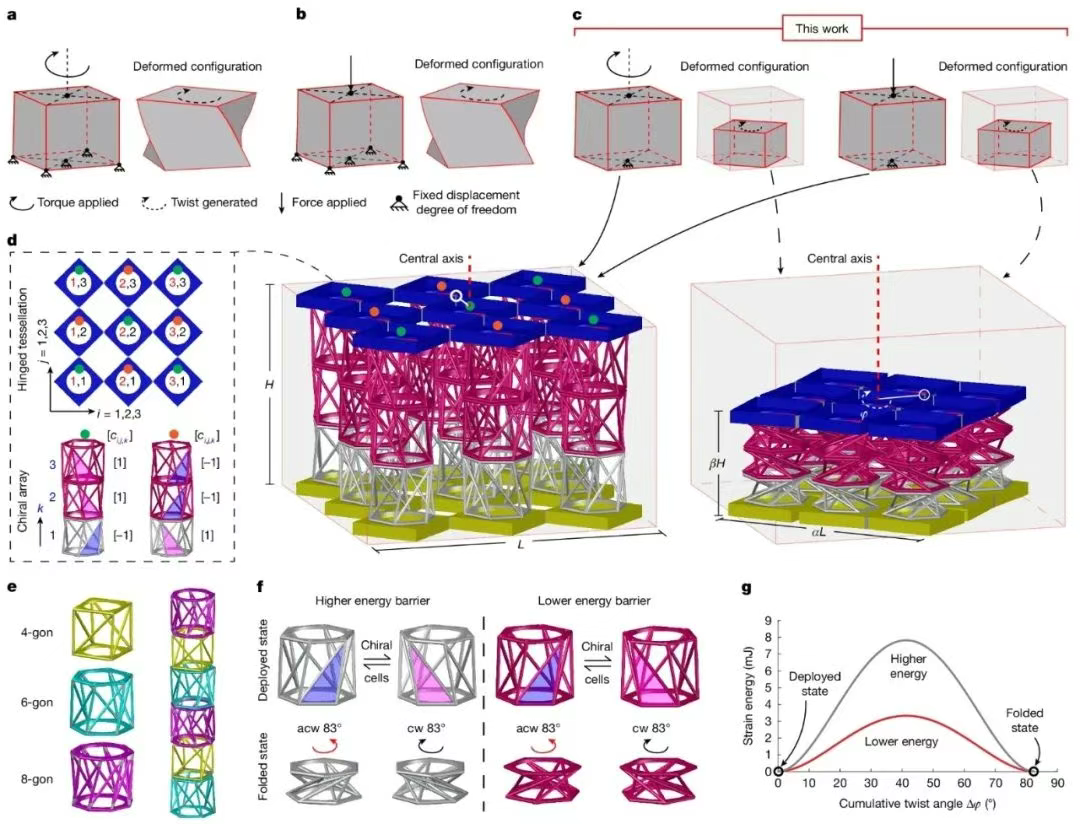
圖文解析圖1. 由鉸鏈鑲嵌和受手性折紙啟發的晶格單元組成的多模態超材料。a,標準彈性材料在施加扭矩時的扭曲變形。b,壓縮狀態下的代表性扭曲超材料3。c,由兩個獨立測試條件驅動的多模態變形機制,即自由平移下的扭曲和自由旋轉下的線性位移。d,超材料組件在未變形配置(左)和變形配置(右)下的示意圖。該組件由鉸鏈鑲嵌(藍色和黃色)和受折紙啟發的晶格單元陣列(紅色和灰色)組成。L,邊長;H,高度;φ?∈?[0°,?90°],扭曲角;α?∈?[0,?1],長度變化標量; β?∈?(0,?1],高度變化標量。插圖顯示了組件中模塊單元的手性分配。e,一系列具有運動學兼容幾何形狀的棒狀晶格單元,例如4邊形、6邊形和8邊形單元。f,兩組具有可區分能壘的手性晶胞。acw,逆時針扭轉;cw,順時針扭轉。g,單元單元的儲存應變能與扭轉角變化的關系。紅色曲線和灰色曲線分別代表低能壘單元和高能壘單元的能量包絡。能量計算基于方法“模擬”中定義的參數(紅色和白色單元)。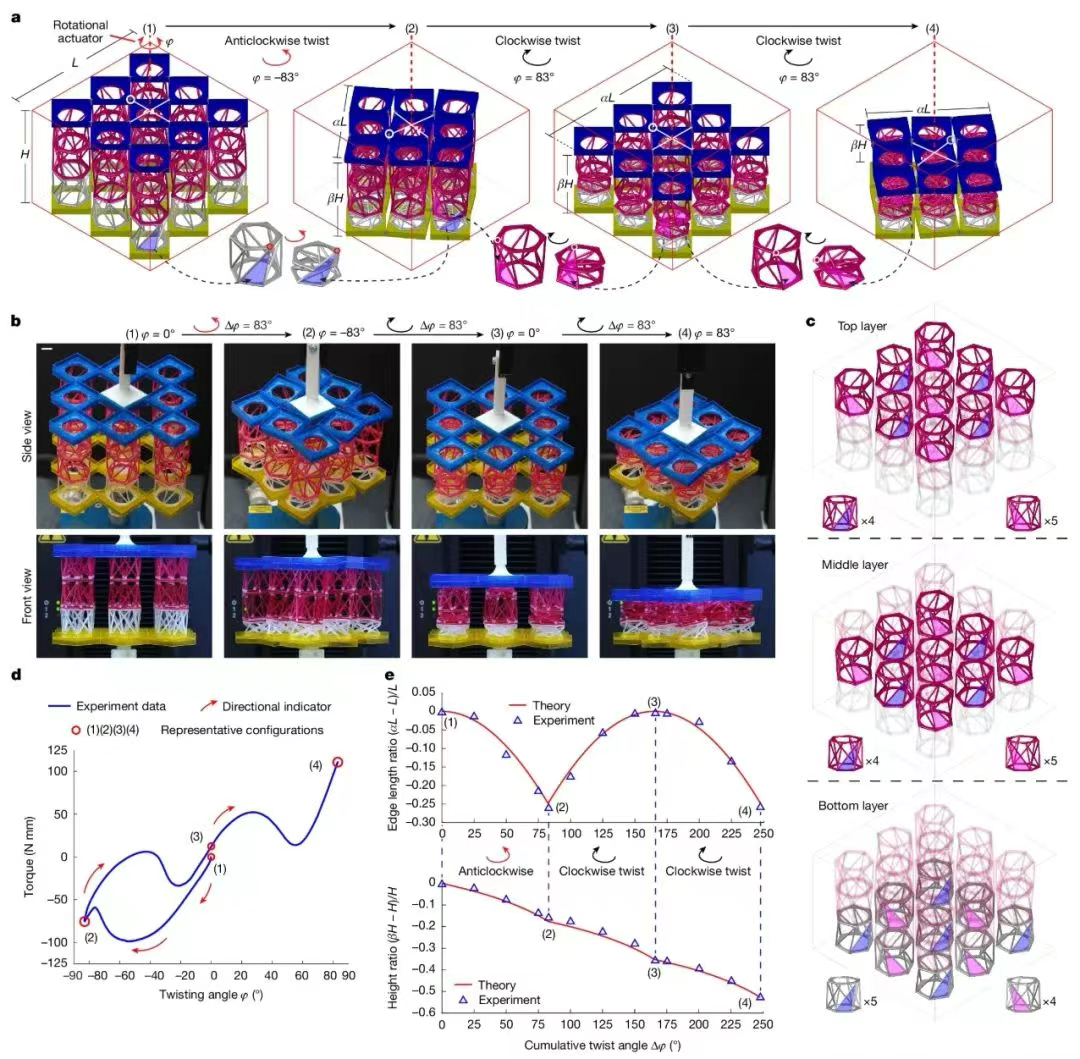
圖2. 使用具有自由平移的旋轉致動器進行多模態變形的實驗驗證。a,按照旋轉加載順序(即逆時針扭轉-83°,然后順時針扭轉83°,最后順時針扭轉83°)的四種代表性配置的示意圖。 b,三層組件的機械測試。插圖分別為從側視圖(上排)和正視圖(下排)拍攝的代表性構型。比例尺,10 毫米。c,超材料在初始未變形構型下的層組成。d,測量的扭矩與扭轉角曲線,并標明四種代表性狀態。紅色箭頭表示測試期間施加的旋轉順序。e,組件邊緣長度變化與累積扭轉角(上排)以及組件高度變化與累積扭轉角(下排)的關系,并將代表性測試數據點與理論運動學分析結果進行比較。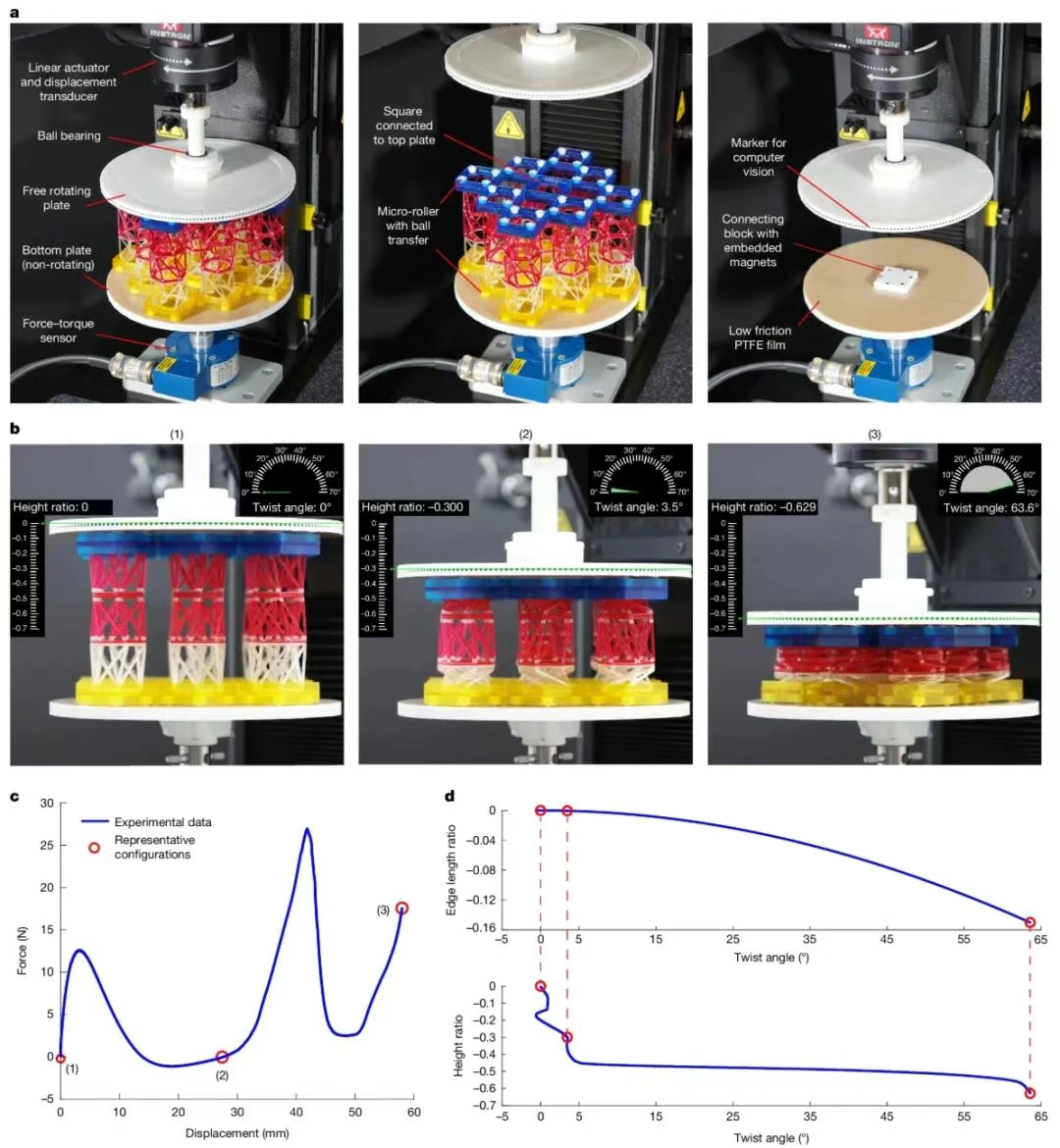
圖3. 使用線性位移驅動和自由旋轉進行多模態變形實驗。a,詳細的測試裝置,顯示邊界條件和載荷。b,三種代表性構型。在每幅圖中,垂直比例尺表示組件的高度變化率,弧形比例尺表示組件的扭轉角。c,測量的力-位移曲線,并標明代表性狀態。 d,組件邊長變化與扭轉角的關系(上)和組件高度變化與扭轉角的關系(下)。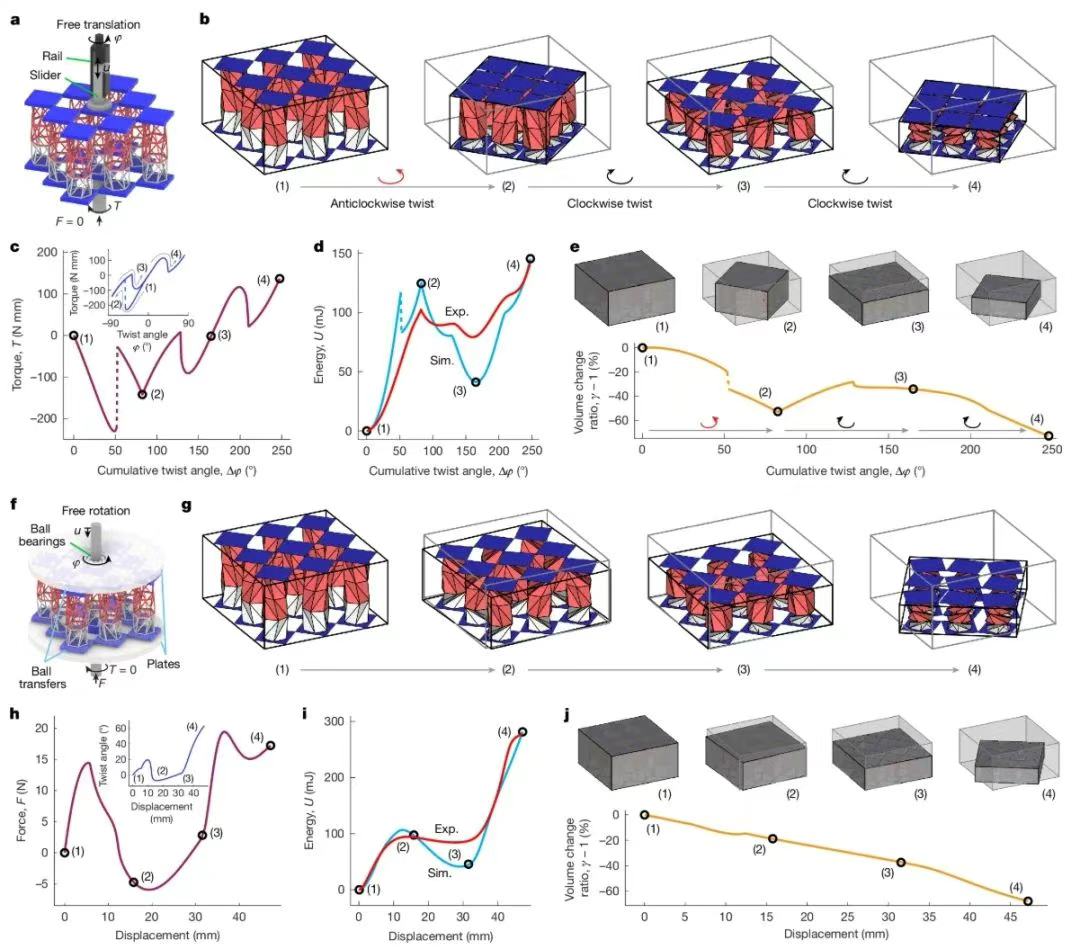
圖4. 模塊化組件多模態變形的替代模型仿真。a,扭轉模擬裝置。b,組件的變形快照(1)–(4)。c,扭矩與累積扭轉角的關系曲線。插圖為扭矩與扭轉角的關系曲線,逆時針旋轉定義為負值,順時針旋轉定義為正值。d,能量與累積扭轉角的關系曲線。e,體積變化率與累積扭轉角及快照(1)–(4)封閉體積的關系曲線。虛線表示由機械不穩定性引起的結構突變。f,壓縮模擬裝置。g,組件的變形快照(1)–(4)。h,力與位移的關系曲線。插圖為扭轉角與位移的關系曲線。i,能量與位移的關系曲線。 j,體積變化率與位移及快照封閉體積的關系曲線(1)–(4)。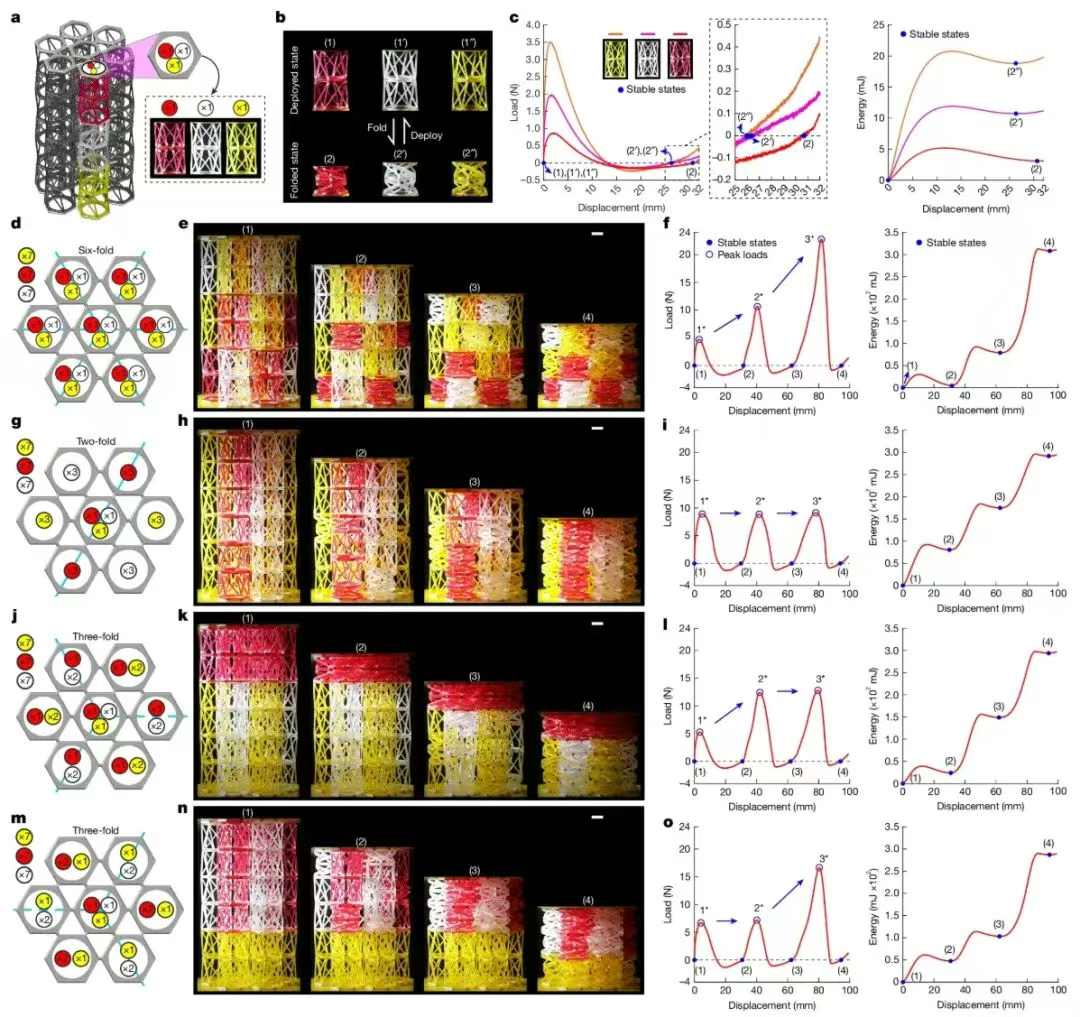
圖5. 用于創建可重新編程超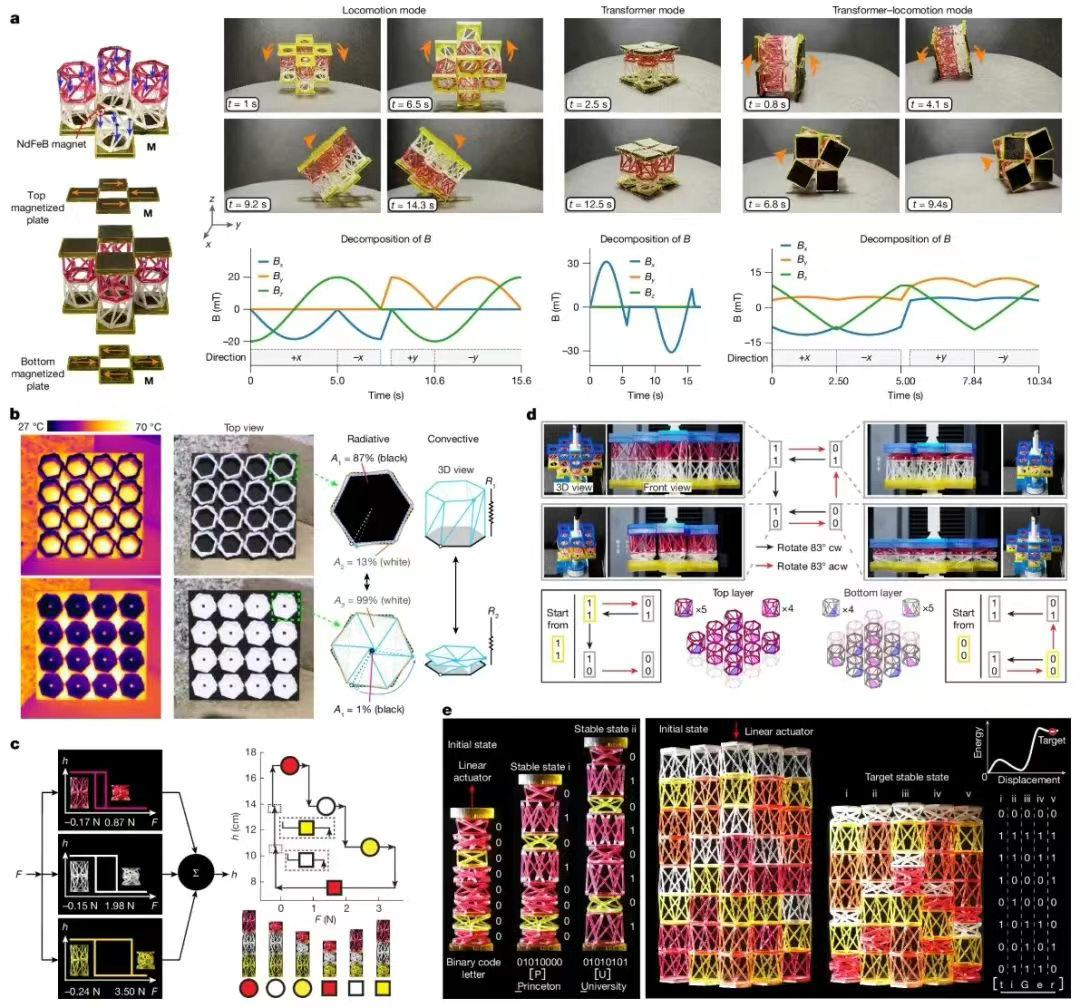
材料的即插即用策略。a,由三種類型的模塊化偶極子組成的架構組件示意圖,這些偶極子分別使用紅色、白色和黃色樹脂制成。b,三個 3D 打印偶極子分別處于展開和折疊狀態。桿的直徑為 1.5 毫米。c,左圖,測量三個偶極子的載荷-位移曲線。穩定狀態的位置用曲線上的藍點標記。右圖,偶極子儲存的能量與位移的關系。能量通過計算載荷-位移圖下的面積來確定。d,由 21 個模塊化偶極子(黃色、紅色和白色各 7 個)組成的六重組件的頂視圖。該示意圖提供了組裝偶極子的說明。e,d 中組件的四種穩定狀態。f,d 中組件的機械性能。左圖,e 中測量的載荷-位移曲線,并帶有四種代表性狀態的標簽。穩定狀態 (1)、(2) 和 (3) 的峰值載荷分別標記為 1*、2* 和 3*。右圖為組件的儲能與垂直位移的關系。d-o,由同一組模塊單元構成的各種組件配置,對應的穩定狀態、測得的載荷-位移曲線和相應的能量圖。比例尺,10 毫米 (e,h,k,n)。
圖6. 多模態折紙超材料的應用范圍。a,磁力機器人變壓器。左圖為運動模式(機器人運動,剛體)。中圖為變壓器模式(材料變形)。右圖為變壓器-運動組合模式。b,體溫調節。在折紙陣列的面上采用光學材料(例如白色輻射冷卻器和黑色太陽能吸收器),可以通過控制每種面片的面積分數來控制太陽能的加熱量。折紙單元的折疊和展開狀態還可以捕獲不同厚度的空氣,從而有效地控制對流熱增益和損失(R1?>?R2)。此概念適用于建筑物的溫度調節。c,具有多個連接滯后的 Preisach 模型。d,非交換性。模塊化手性組裝體的雙模態特性使其在扭轉驅動下具有歷史相關行為。e,可編程信息存儲/加密的兩個實例。左圖為具有雙穩態單元的陣列。右圖為大型折紙組件,經全局驅動以達到所需的目標狀態。人中具有廣泛可重構性的復雜3D變換。
)







![Space Engineers 太空工程師 [DLC 解鎖] [Steam] [Windows]](http://pic.xiahunao.cn/Space Engineers 太空工程師 [DLC 解鎖] [Steam] [Windows])


![題解:P2485 [SDOI2011] 計算器](http://pic.xiahunao.cn/題解:P2485 [SDOI2011] 計算器)



![[SC]SystemC在GPU/CPU SoC驗證中的應用案例](http://pic.xiahunao.cn/[SC]SystemC在GPU/CPU SoC驗證中的應用案例)



