摘要:?想讓你的 ESP32 不再僅僅是控制燈光的工具嗎? 本文將帶你使用 ESP32 開發板、步進電機和簡單的機械結構打造一個能夠自動寫字的機器人。我們將深入淺出地講解硬件連接、軟件代碼以及控制邏輯,并提供完整的項目代碼和電路圖,即使是 Arduino 和物聯網開發的初學者也能輕松上手。
關鍵詞:?ESP32, 步進電機, 寫字機器人, Arduino, 物聯網
一、 項目概述
本項目利用 ESP32 強大的性能和豐富的接口資源,精確控制兩個步進電機分別驅動 X-Y 軸的移動,從而引導筆尖在紙面上書寫文字。
1.1 項目目標
- 實現 ESP32 對步進電機的精確控制,實現流暢的文字書寫。
- 通過程序控制,使機器人能夠按照預設軌跡書寫文字。
- 提供友好的人機交互界面,方便用戶輸入文字并控制書寫。
1.2 項目特色
- 低成本:?僅需使用 ESP32 和常見的步進電機驅動模塊,成本低廉。
- 易于實現:?項目代碼基于 Arduino 平臺開發,簡單易懂,適合初學者學習。
- 擴展性強:?可以通過添加傳感器、網絡模塊等,實現更加豐富的功能,例如遠程控制、圖像識別等。
二、 硬件設計
2.1 硬件清單
- ESP32 開發板 x 1
- 步進電機驅動器 (A4988 或 DRV8825) x 2
- 步進電機 (42 步進電機) x 2
- 筆架結構 (可參考 3D 打印模型或自行設計)
- 電源 (5V)
- 面包板
- 杜邦線
2.2 電路連接
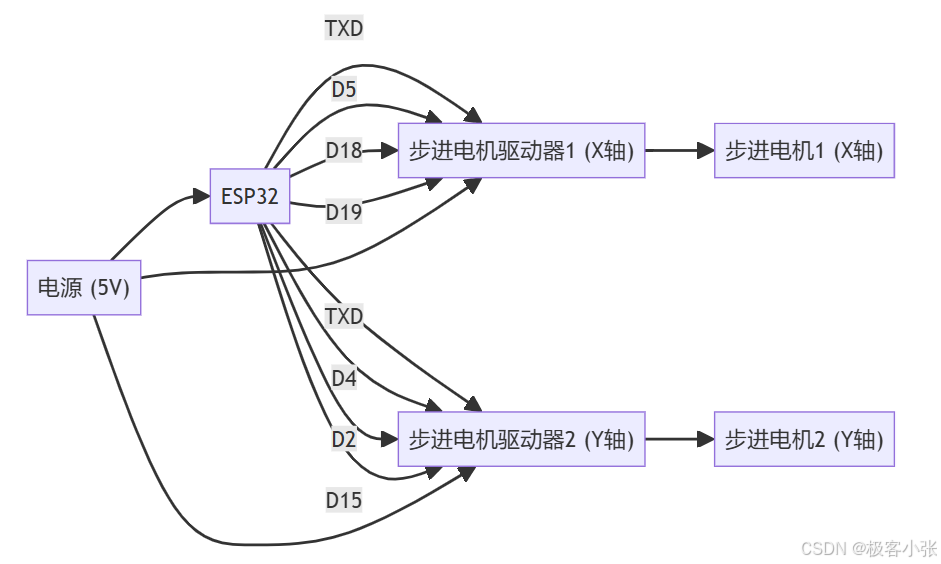
說明:
- ESP32 的 TXD 引腳連接到兩個驅動器的 EN 引腳,用于控制電機的使能狀態。
- D5、D18、D19 引腳分別連接到 X 軸驅動器的 DIR、STEP、SLEEP 引腳,用于控制 X 軸電機的方向、步進和休眠狀態。
- D4、D2、D15 引腳分別連接到 Y 軸驅動器的 DIR、STEP、SLEEP 引腳,用于控制 Y 軸電機的方向、步進和休眠狀態。
2.3 機械結構
本項目采用簡單的筆架結構,通過兩個步進電機分別控制 X 軸和 Y 軸的移動,從而帶動筆尖在紙面上書寫。
三、 軟件設計
3.1 開發環境
- Arduino IDE
- ESP32 開發板支持包
3.2 庫文件
- Stepper.h:?Arduino IDE 自帶的步進電機控制庫,用于控制步進電機的基本運轉。
- AccelStepper.h:?提供加速度控制的步進電機庫,使電機運行更加平滑,減少震動和噪音。
3.3 代碼實現
#include <Stepper.h>
#include <AccelStepper.h>// 定義步進電機引腳
#define X_STEP_PIN 5
#define X_DIR_PIN 18
#define X_ENABLE_PIN 19
#define Y_STEP_PIN 4
#define Y_DIR_PIN 2
#define Y_ENABLE_PIN 15// 定義步進電機參數
#define STEPS_PER_MM 20 // 每毫米步數,根據實際情況調整
#define MAX_SPEED 1000 // 最大速度
#define ACCELERATION 500 // 加速度// 創建步進電機對象
AccelStepper stepperX(AccelStepper::DRIVER, X_STEP_PIN, X_DIR_PIN);
AccelStepper stepperY(AccelStepper::DRIVER, Y_STEP_PIN, Y_DIR_PIN);void setup() {Serial.begin(115200);// 初始化步進電機參數stepperX.setMaxSpeed(MAX_SPEED);stepperX.setAcceleration(ACCELERATION);stepperY.setMaxSpeed(MAX_SPEED);stepperY.setAcceleration(ACCELERATION);// 使能步進電機digitalWrite(X_ENABLE_PIN, LOW);digitalWrite(Y_ENABLE_PIN, LOW);
}void loop() {// 此處添加控制邏輯,例如:// moveTo(10, 10); // 移動到坐標 (10, 10)// drawLine(0, 0, 20, 20); // 畫一條從 (0, 0) 到 (20, 20) 的直線
}// 移動到指定坐標
void moveTo(float x, float y) {// 將坐標轉換為步數long targetX = x * STEPS_PER_MM;long targetY = y * STEPS_PER_MM;// 控制電機移動到目標位置stepperX.moveTo(targetX);stepperY.moveTo(targetY);// 等待電機移動完成while (stepperX.distanceToGo() != 0 || stepperY.distanceToGo() != 0) {stepperX.run();stepperY.run();}
}// 畫一條直線
void drawLine(float x1, float y1, float x2, float y2) {// 計算直線長度float distance = sqrt(pow(x2 - x1, 2) + pow(y2 - y1, 2));// 計算步數long steps = distance * STEPS_PER_MM;// 計算 X 軸和 Y 軸每步的增量float xInc = (x2 - x1) / steps;float yInc = (y2 - y1) / steps;// 循環執行步進for (long i = 0; i <= steps; i++) {moveTo(x1 + xInc * i, y1 + yInc * i);}
}
代碼說明:
- 包含頭文件:?引入?
Stepper.h?和?AccelStepper.h?庫文件,用于控制步進電機。 - 定義引腳和參數:?定義步進電機連接的引腳以及電機參數,例如每毫米步數、最大速度和加速度。
- 創建步進電機對象:?創建?
AccelStepper?對象,分別代表 X 軸和 Y 軸的步進電機。 - 設置電機參數:?在?
setup()?函數中初始化步進電機的最大速度和加速度。 - 使能電機:?將電機使能引腳設置為低電平,使能電機。
- 控制邏輯:?在?
loop()?函數中添加控制邏輯,例如調用?moveTo()?函數移動到指定坐標,或調用?drawLine()?函數畫一條直線。 - 移動到指定坐標:?
moveTo()?函數接收目標坐標作為參數,將坐標轉換為步數,然后控制電機移動到目標位置。 - 畫一條直線:?
drawLine()?函數接收直線的起點和終點坐標作為參數,計算直線長度和步數,然后循環執行步進,使筆尖沿著直線移動。
使用方法:
- 將代碼上傳到 ESP32 開發板:?將上述代碼復制到 Arduino IDE 中,選擇正確的開發板型號和端口號,然后點擊上傳按鈕將代碼上傳到 ESP32 開發板。
- 打開串口監視器:?上傳完成后,打開 Arduino IDE 的串口監視器,選擇合適的波特率 (例如 115200)。
- 輸入指令控制電機:?在串口監視器中輸入指令控制電機,例如:
M10,10?將筆尖移動到坐標 (10, 10)。L0,0,20,20?畫一條從 (0, 0) 到 (20, 20) 的直線。
- 觀察機器人書寫:?觀察機器人根據指令進行書寫,并根據需要調整代碼中的參數,例如步進電機參數、坐標值等。
注意:
- 在運行代碼之前,請確保已將步進電機、驅動器和 ESP32 正確連接,并將筆尖放置在紙面的合適位置。
- 可以根據實際需要修改代碼中的指令格式和控制邏輯,例如添加更多指令控制電機速度、加速度等。
- 可以使用不同的字體庫和算法將文字轉換為坐標點,實現更加復雜的文字書寫。
進階功能:
- 添加 LCD 顯示屏:?可以添加一個 LCD 顯示屏,用于顯示當前坐標、輸入文字等信息,提升用戶體驗。
- 使用藍牙或 Wi-Fi 控制:?可以使用藍牙模塊或 Wi-Fi 模塊,實現手機或電腦對機器人的無線控制。
- 結合圖像識別:?可以添加攝像頭模塊,使用圖像識別技術識別文字或圖案,實現更加智能的書寫功能。
總結:
本文介紹了如何使用 ESP32、步進電機和簡單的機械結構打造一個能夠自動寫字的機器人。通過學習本文,讀者可以了解到步進電機的控制原理、基本的 Arduino 編程知識以及簡單的機械結構設計,為進一步學習機器人和物聯網開發奠定基礎。
)
)

--迭代器)







】為什么在設計遷移后,無法在Nios II BSP 編輯器中找到 DDR3 作為內存區域)

)
)




