筆者近期上了國科大周曉飛老師《強化學習及其應用》課程,計劃整理一個強化學習系列筆記。筆記中所引用的內容部分出自周老師的課程PPT。筆記中如有不到之處,敬請批評指正。
文章目錄
- 1.1 概述
- 1.2 Markov決策過程
- 1.2.1 Markov Process (MP) 馬爾科夫過程
- 1.2.2 Markov Reward Process (MRP) 馬爾科夫回報過程
- 1.2.3 Markov Decision Process (MDP) 馬爾科夫決策過程
- 1.3 強化學習
1.1 概述
強化學習:通過與環境互動,獲取環境反饋的樣本;回報(作為監督),進行最優決策的機器學習。
強化學習的過程可以用下圖進行描述:在狀態S1下選擇動作a1,獲取回報R1的同時跳轉到狀態S2;在狀態S2下選擇動作a2,獲取回報R2的同時跳轉到狀態S3……如此循環下去。
強化學習的目標就是:對于給定的狀態S,我們能選一個比較好的動作a,使得回報最大。

1.2 Markov決策過程
1.2.1 Markov Process (MP) 馬爾科夫過程
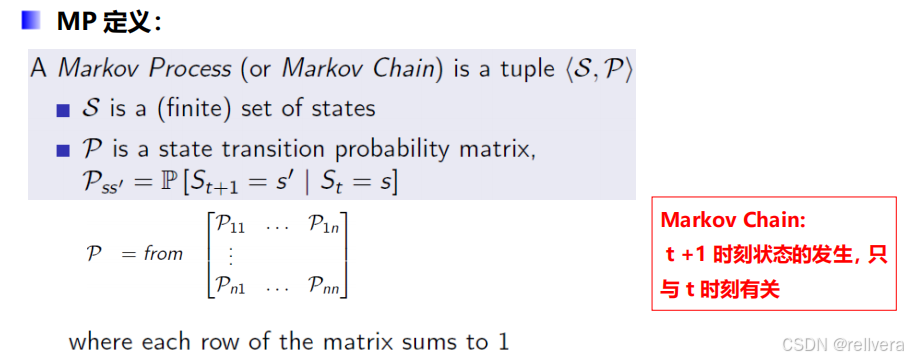
一個馬爾科夫過程是一個元組<S,P>,其中S表示一個有限的狀態集合,P表示一個狀態轉移矩陣。
比如:下圖矩陣P中的P1n表示,t時刻狀態為n的情況下,t+1時刻轉移到狀態1的概率。矩陣P中的第一行表示從狀態1轉移出去的概率,最后一行表示從狀態n轉移出去的概率,所以矩陣中每一行的和都是1。
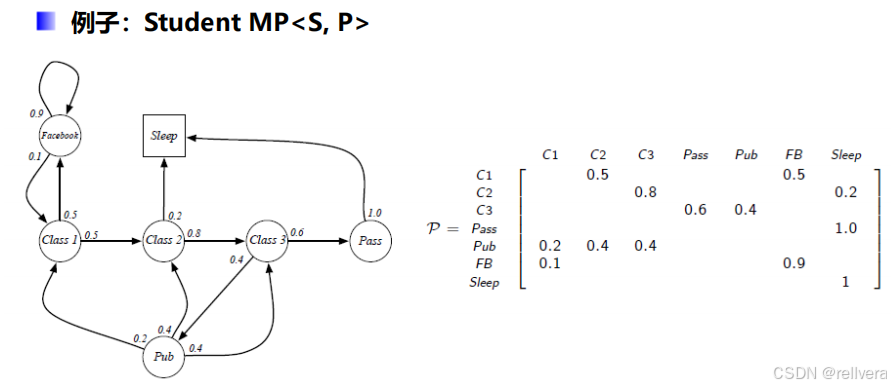
這是Markov過程的一個例子:
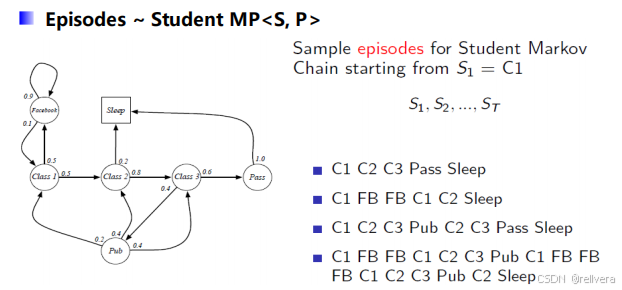
在這個例子中,假設初始狀態為C1(即class1),進行4次采樣,可以得到4個采樣結果:
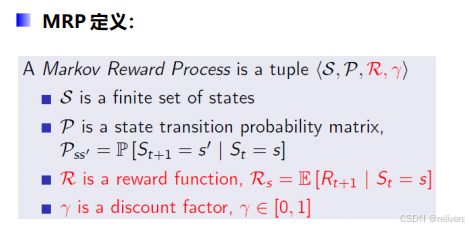
1.2.2 Markov Reward Process (MRP) 馬爾科夫回報過程
馬爾科夫回報過程也是一個元組 < S , P , R , γ > <S,P,R,\gamma> <S,P,R,γ>,相比于馬爾科夫過程MP,MRP多了 R R R和 γ \gamma γ。其中, R R R表示在給定狀態 s s s的情況下,未來回報的期望。 γ \gamma γ則是折扣因子。
那么,該怎么計算回報呢?假設當前時間為 t t t,要計算從時間 t t t開始獲得的獎勵 G t G_t Gt?。最直接的方法是計算 G t = R t + 1 + R t + 2 + R t + 3 . . . . . . G_t=R_{t+1}+R_{t+2}+R_{t+3}...... Gt?=Rt+1?+Rt+2?+Rt+3?......,但是這樣計算是不好的。
第一,如果這么算,就認為未來的獎勵和當前的獎勵同等重要,這在許多現實問題中并不合理。例如,在金融和經濟領域,時間越長的不確定性越高,因此更傾向于重視當前的收益。
第二,在無限時間步長的過程中,累積獎勵的和可能是發散的,這會導致價值函數無法計算和優化。
所以,引入了折扣因子 γ \gamma γ。獎勵計算方法如下圖公式所示。 γ \gamma γ趨向于0時,表示更注重當前獎勵, γ \gamma γ趨向于1時,表示更具有遠見。

下面是一個MRP的計算實例。首先進行采樣得到幾個觀測序列。然后套上面的公式得到觀測序列的回報,初始狀態為 C 1 C1 C1, γ \gamma γ取值為1/2(每一個動作對應的回報值在下一張圖片上有)。

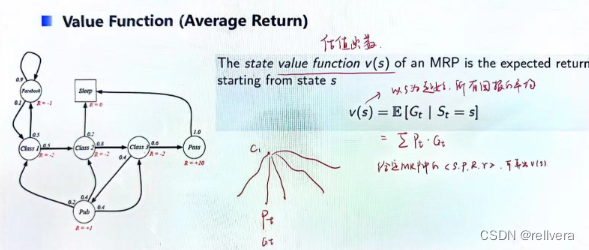
在MRP中還有一個要提的概念是估值函數(value function),它表示以狀態s為起始,所有回報的平均。就像下圖中所畫的一樣,假設從狀態c1起始進行采樣,得到多個觀測序列,每一個觀測序列都有對應被采樣到的概率 P t P_t Pt?,以及獲得的回報 G t G_t Gt?。將 P t ? G t P_t*G_t Pt??Gt?再求和就是估值函數v(s)。
所以,當MRP確定的時候,v(s)就是確定的值。
那么v(s)該如何計算呢?
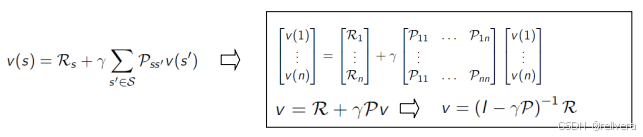
Bellman方程將這個估值函數表示為即時獎勵和后續狀態價值的和,其公式如下圖所示。

然后可以通過解方程解求出v(s),如下圖所示。下圖中的 R R R、 g a m m a gamma gamma、 P P P都是MRP中的已知量,只有v(1)~v(n)是未知量。也就是說,當 MRP(環境參數)已知時,理論上通過求解 Bellman 方程式可以計算 v(s)。
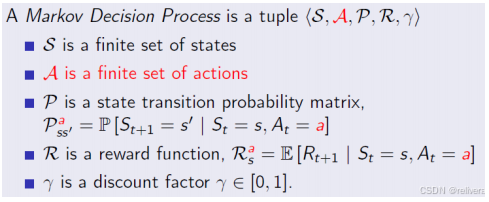
1.2.3 Markov Decision Process (MDP) 馬爾科夫決策過程
MDP的定義:相比于MRP,MDP多了一個有限的動作集A。可以理解為:MDP 是一個多層的 MRP,每一層對應一個行動 a。
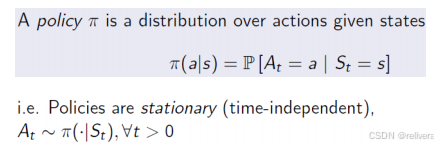
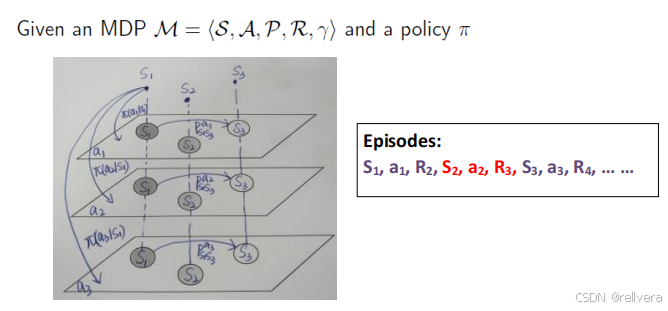
那么給定一個狀態s,我們該選擇怎樣的行動a呢?這就要提到策略 π π π(policy π π π)了,策略 π π π表示在狀態s情況下,跳轉到動作a的概率。
這是一個MDP示意圖。圖中每一層代表了一個MRP,也隱含了一個動作a。選擇a的過程其實就是在不同層之間跳轉。
通過推導可以得出下面兩個結論:
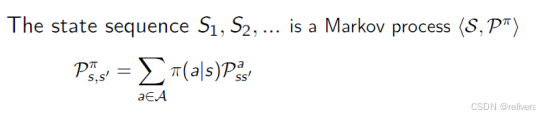
(1)MDP by a policy is a MP
這意味著,一旦我們固定了策略 𝜋,在任意狀態 𝑠下采取動作 𝑎 的概率就確定了,這樣原來的MDP就變成了一個不再依賴動作選擇的過程,即一個Markov Process (MP)。
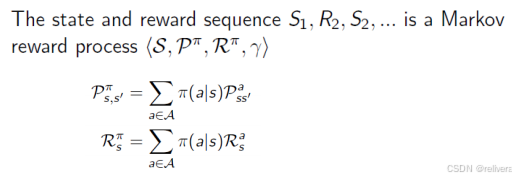
(2)MDP by a policy is also a MRP
這意味著,在有了策略 𝜋 后,MDP中的獎勵也可以固定下來,即從狀態 𝑠 到狀態 𝑠′ 的轉移的期望獎勵。
再補充幾個概念:
(1)state-value function v π ( s ) v_π(s) vπ?(s):從狀態s開始,按照策略 π π π進行決策得到的期望回報
(2)action-value function q π ( s , a ) q_π(s,a) qπ?(s,a):從狀態s開始,采取動作a,按照策略 π π π進行決策得到的期望回報
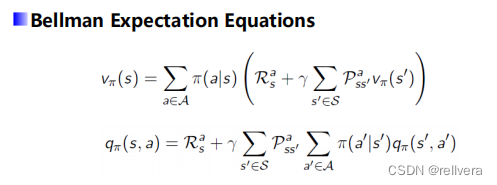
(3) v π ( s ) v_π(s) vπ?(s)和 q π ( s , a ) q_π(s,a) qπ?(s,a)的關系如下圖中紅色方框中的公式所示。

此時,有了MDP by a policy is a MP、MDP by a policy is also a MRP這兩個結論后,我們可以進一步推導出:
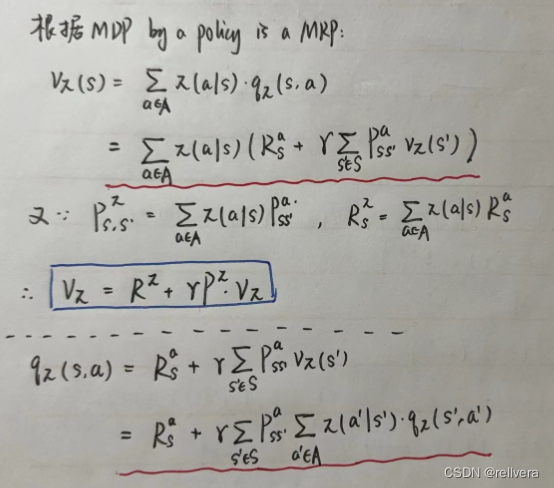
從而得到貝爾曼期望方程:
Bellman期望方程有啥用呢?
(1)策略評估。用于評估一個給定策略 𝜋 的價值函數 V π ( s ) V^π(s) Vπ(s)和 Q π ( s , a ) Q^π(s,a) Qπ(s,a)。通過迭代的方法,可以逐步逼近真實的值函數。
(2)策略改進。在策略迭代和值迭代算法中,Bellman期望方程用于評估當前策略,并根據評估結果改進策略,從而逐步找到最優策略。
1.3 強化學習
再回想一下強化學習的目標,在強化學習中,我們的目標是對于給定的狀態S,我們能選一個比較好的動作a,使得回報最大。即:學習一個策略 π π π,讓 v π ( s ) v_π(s) vπ?(s)和 q π ( s , a ) q_π(s,a) qπ?(s,a)最大。為了達到這個目標,引入了optimal state-value function v π ( s ) v_π(s) vπ?(s)和optimal action-value function q π ( s , a ) q_π(s,a) qπ?(s,a):
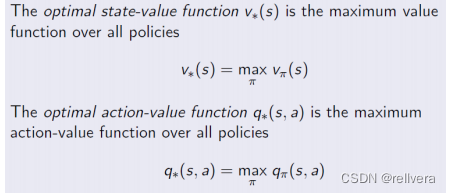
在此基礎上推導出了貝爾曼最優方程:

推導過程詳見這篇博文:貝爾曼最優方程推導,這篇文章寫得挺好的,所以筆者在此就不多贅述啦,大家直接看這篇文章就好!
貝爾曼最優方程定義了最優值函數和最優動作值函數。最優值函數表示從狀態 𝑠 出發,按照最優策略所能獲得的最大期望回報。最優動作值函數表示在狀態 𝑠 采取動作 𝑎 后,按照最優策略所能獲得的最大期望回報。
貝爾曼最優方程在強化學習中可以用來定義和求解最優策略,使得在每個狀態下的累積回報最大化。它為我們提供了一種系統的方法,通過動態規劃和迭代更新來逼近最優解,是解決強化學習問題的核心工具。
SvelteKit教程:錯誤頁和重定向)





安全與加密概述)


)


——ArrayList)

mysql 建立 測試 數據庫及內容)




