文章目錄
- 一、什么是雷達成像
- (1)主要的遙感探測手段:光學、紅外和雷達
- (2)從數學的角度:雷達成像主要研究什么?
- 二、SAR的多維理解
- (1)雷達角度理解SAR
- (2)信號處理角度理解SAR
- 為什么可以從回波信號變換到兩維頻譜?為什么說回波信號就反映了頻譜?——數學原理
- (3)數學角度理解SAR
- 離散情況
- 離散情況重構圖像:反投影算法
- 連續情況
- 連續情況重構圖像:Randon變換和反變換
- 三、SAR成像算法的統一解釋
- (1)極坐標格式算法
- 極坐標格式轉換
- (2)距離徙動算法
- (3)卷積反投影算法
https://www.bilibili.com/video/BV1fG4y1y7Eq/?spm_id_from=333.788&vd_source=e3f5663396069f720fed59c6d41ed6f7
一、什么是雷達成像
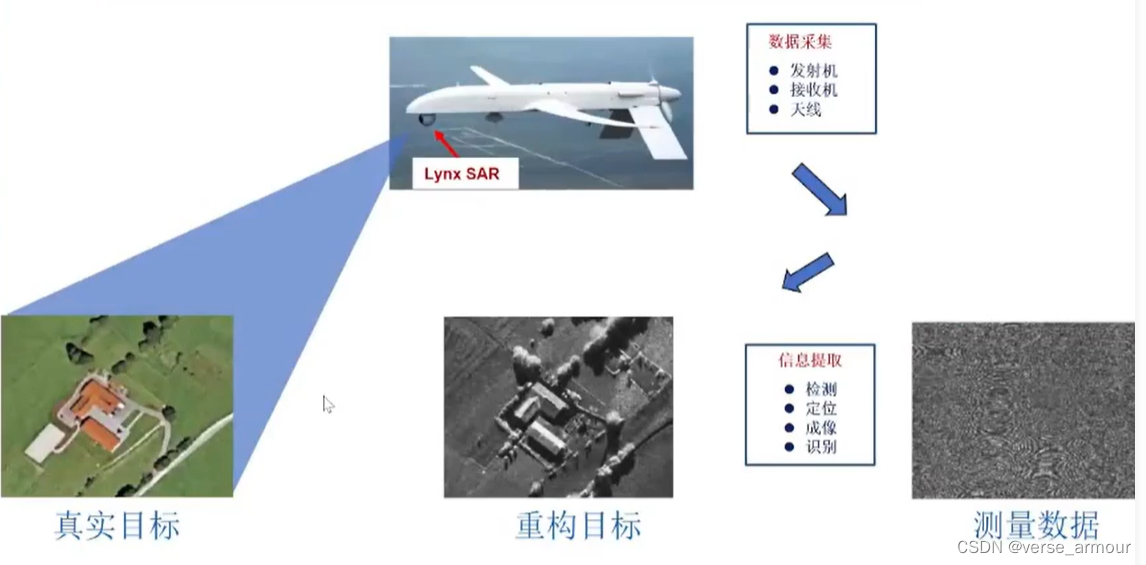
成像雷達是一種主動傳感器,它利用電磁波作為媒介,采集目標回撥數據,并從回波數據中提取目標空間集合形狀信息(重構目標圖像)
(1)主要的遙感探測手段:光學、紅外和雷達
雷達成像相比于光學成像、紅外成像的優勢:
- 全天候工作(不受氣候條件限制)
- 全天時工作(不受白天黑夜限制)
- 探測距離遠(幾百公里甚至幾千公里)
- 是光學、紅外的補充(不同頻譜觀察)
(2)從數學的角度:雷達成像主要研究什么?
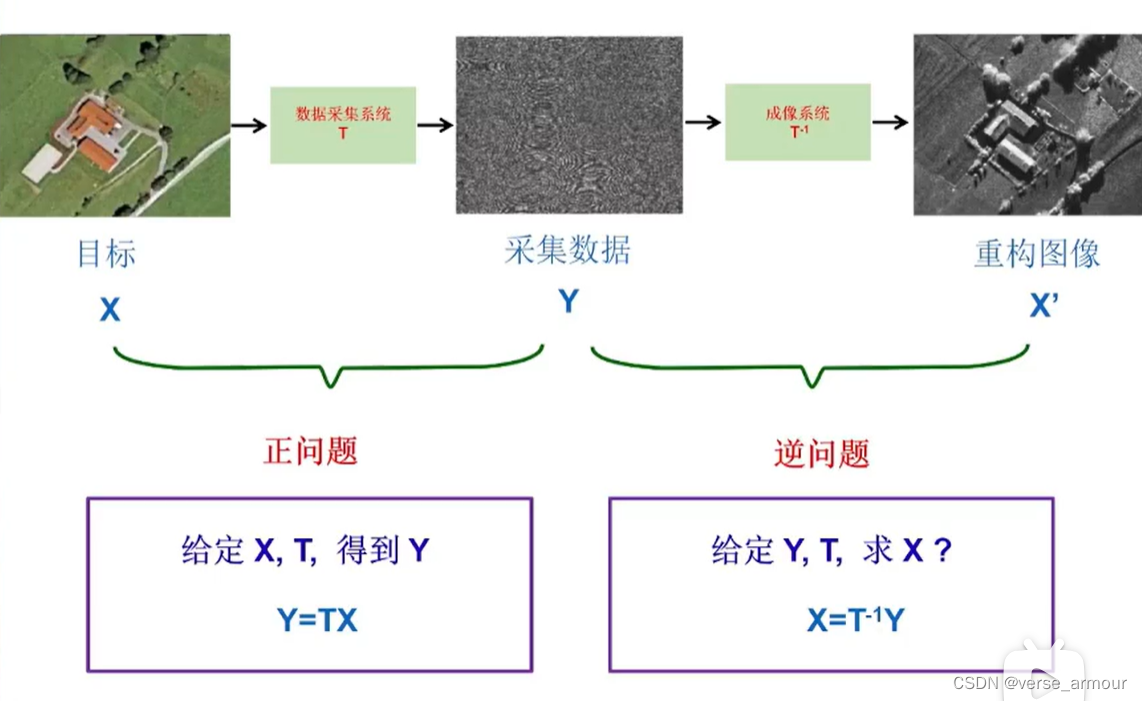
雷達成像研究的兩個問題:正問題和逆問題
- 正問題:從被觀測目標 X X X經過數據采集系統 T T T得到采集數據 Y Y Y。即給定 X X X, T T T,求解 Y Y Y。 Y = T X Y=TX Y=TX。
- 逆問題:從采集數據 Y Y Y經過成像系統 T ? 1 T^{-1} T?1得到重構圖像 X ′ X^{'} X′。即給定 Y Y Y, T T T,求解 X X X。 X = T ? 1 Y X=T^{-1}Y X=T?1Y。
雷達設計的兩大任務:數據采集和信息提取
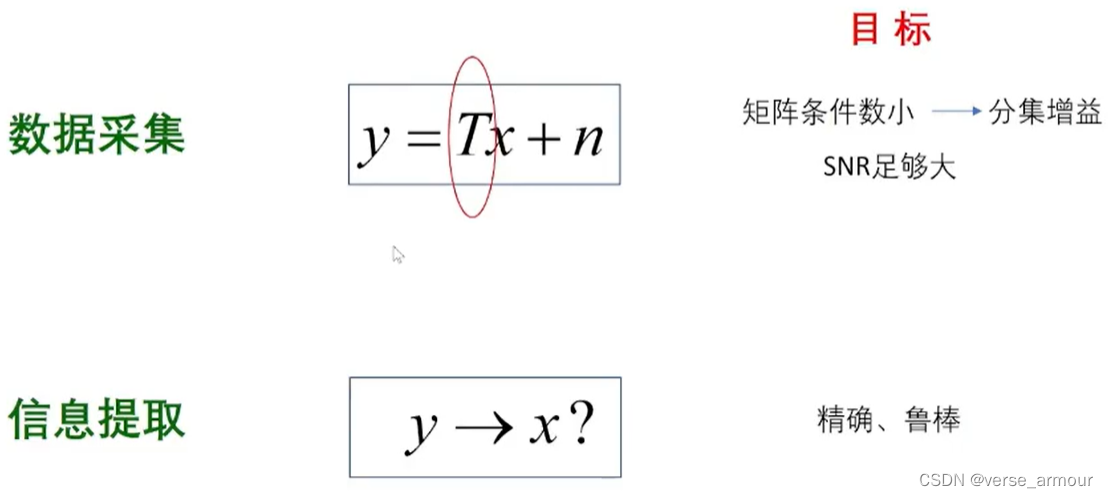
數據采集: y = T x + n y=Tx+n y=Tx+n
算子 T T T由雷達的發射信號決定的,包括發射信號的波形 、極化方式、天線、發射信號調制。
如何設計雷達的發射信號 T T T使得可以更好地提取信息 x x x?
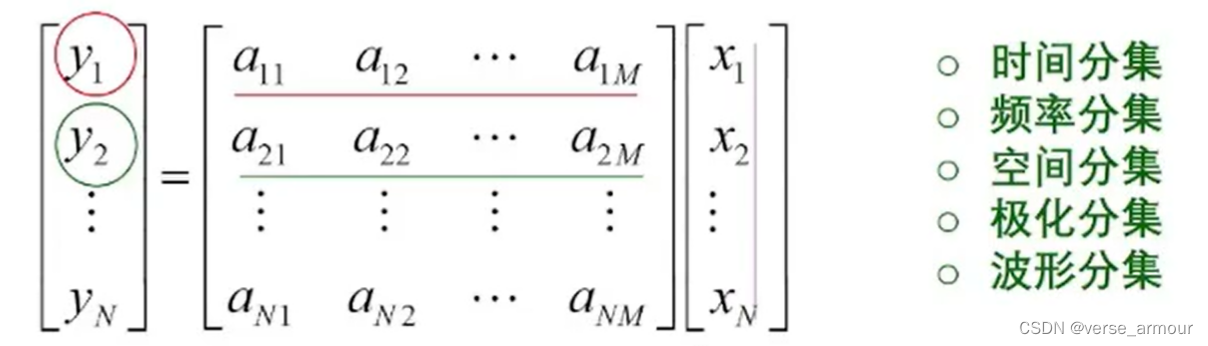
(1)矩陣 T T T要滿足每一行都不一樣,因為有多少個未知數,就得有多少個方程,這樣才能把未知向量 x x x解出來。
(2)最好的情況是矩陣 T T T是正交的,這樣這個矩陣就沒有冗余。
(3)放在雷達成像的背景下來理解:就是要設計的這個數據采集系統(觀測方式)最好要使得我們每次的觀測都不一樣,這樣才能最大化地獲取這個目標的信息。最大化獲取目標的信息才能方便重構目標圖像,提高重構圖像的精度。
信息提取: y ? > x ? y->x? y?>x?
通常工程上對這個方程的求解認為是一個變態的問題。
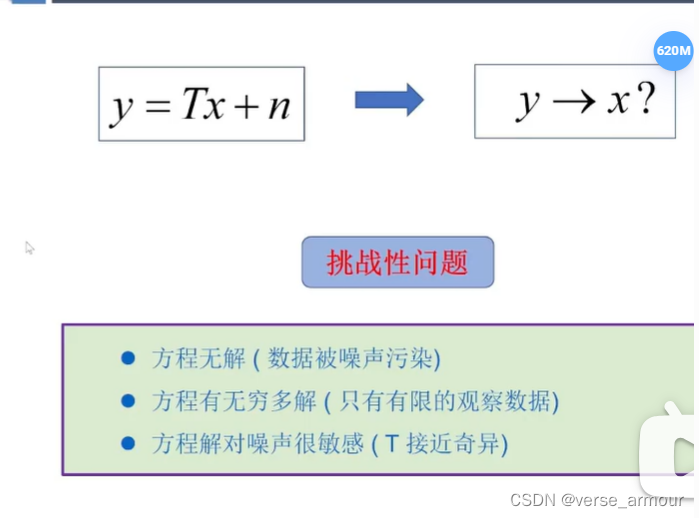
三個挑戰性問題:
(1)方程無解(數據被噪聲污染)
(2)方程有無窮多解(只有有限的觀察數據)
任何一個觀測目標都可以認為是一個無窮維度的向量,但是我們實際觀察到的數據是有限維度的,即我們獲得的方程的個數小于實際觀測目標的維度(方程的個數少于未知數的個數),則該方程組有無窮多個解。
(3)方程解對噪聲很敏感( T T T接近奇異,行列式非常趨近于0)
此時,方程組有唯一解,但是這個解對噪聲非常敏感。只要 T T T有一點噪聲的擾動,這個解 x x x就會偏離真實值很大。
工程上對于無解的情況可以求出一個最小二乘解;無窮多個解的時候可以求出一個最小范數。比如我們去成像一個飛機,我們不需要得到一個顯微鏡級別的成像,我們只需要達到米級或者亞米級就夠了,沒有必要達到分子級或者原子級的精度,得到一個精確解。因此,在工程上,沒有必要求出這個精確解。
二、SAR的多維理解

(1)雷達角度理解SAR
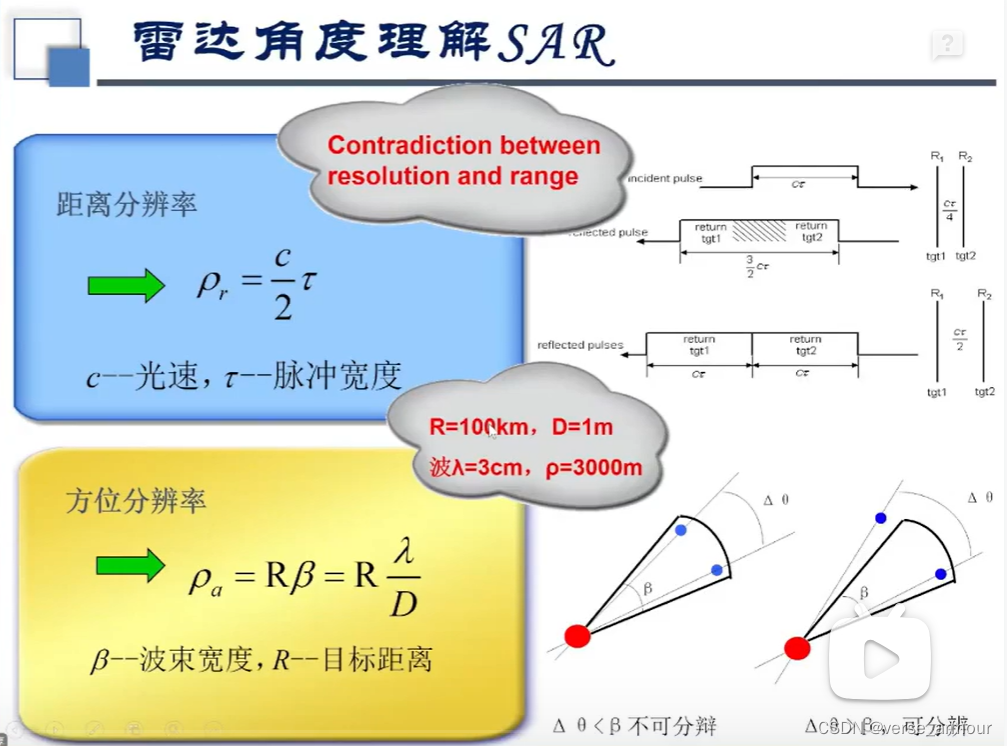
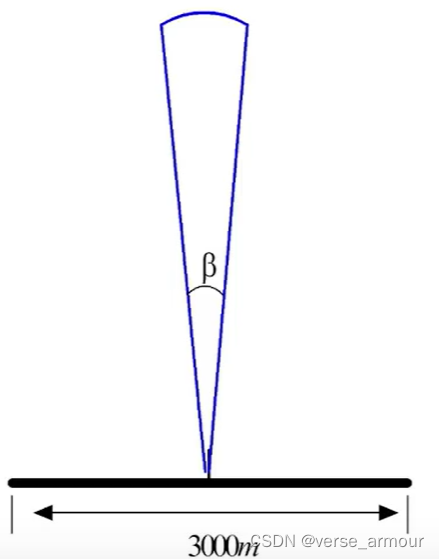
D D D表示天線的長度。如果想要方位分辨率達到1m,但是 R = 100 k m , λ = 3 c m R=100km,\lambda=3cm R=100km,λ=3cm保持不變, D = 3000 m D=3000m D=3000m。
實現困難:
- 3000m甚至30000m的天線孔徑在物理上很難實現
- 即使實現了也很難在飛機、導彈、衛星上應用
SAR是如何解決這個問題的呢?
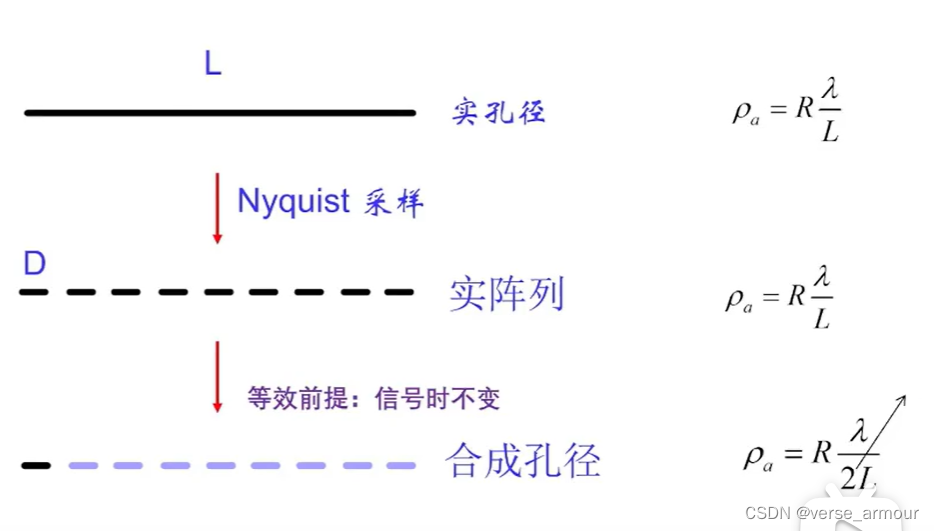
- 在空間中將天線孔徑通過Nyquist采樣離散化。
- 實陣列:得到的實陣列仍然不方便應用在飛機、導彈、衛星上,實陣列相當于在多個不同的角度觀察,模擬了一個大的天線孔徑的觀察效果。(實孔徑是一次就可以從不同角度去觀察)
- 合成孔徑:僅用實陣列中的一個小的天線孔徑,去達到一系列實陣列的觀察效果:用時間換空間。用一個天線孔徑從不同的位置去觀察。
等效前提:信號時不變。SAR成像關注的是地面目標,一般情況下地面目標在不同時間內的散射特性可以認為保持不變,滿足信號時不變的前提。
(2)信號處理角度理解SAR
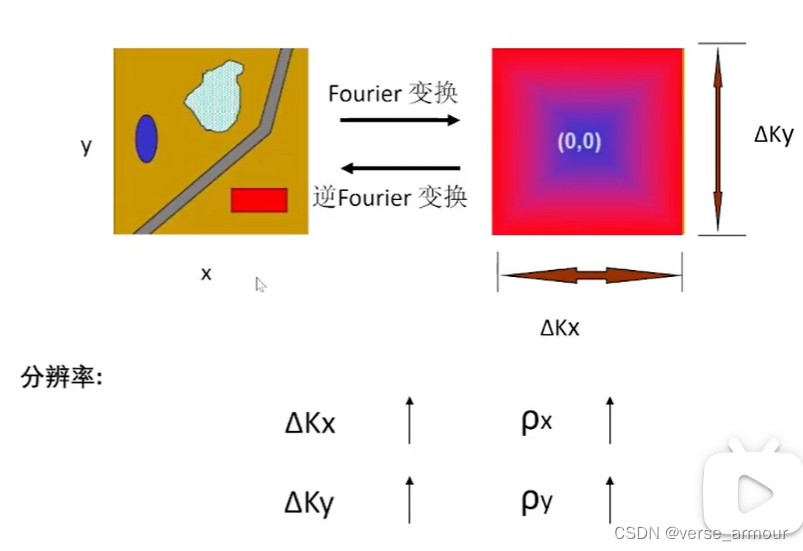
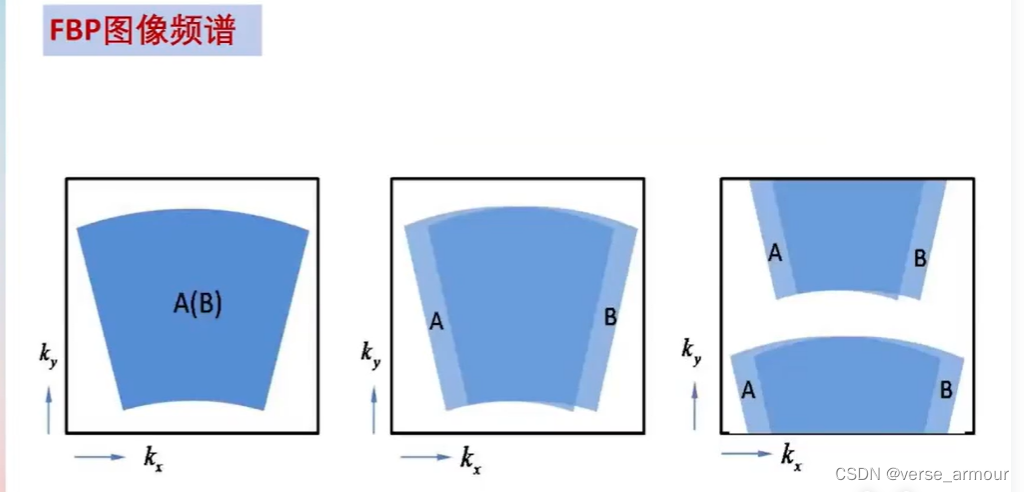
任何空域有限的信號,在頻譜上是無限的。但是我們觀察到的頻譜又一定是有限的,通過有限的頻譜作傅里葉逆變換很難重構出一個高精度的目標。
實際上我們去獲取頻譜的時候只能獲取一些離散的采樣值,可以是矩形格式采樣,也可以是極坐標格式采樣。
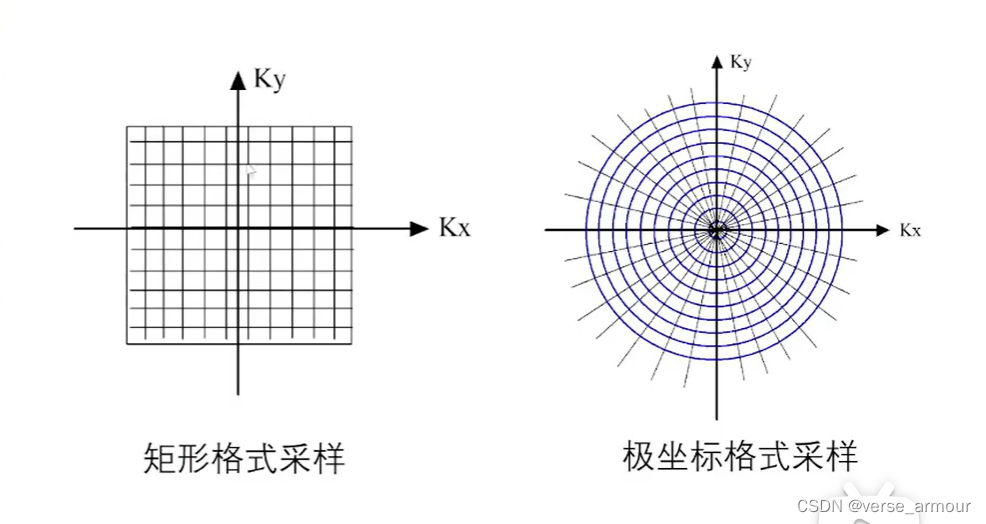
對于SAR成像采集到的信號,經過一定的預處理之后,得到的就是極坐標格式的采樣。在極徑上采樣一定的范圍,在極角上采樣一定的范圍。
在極徑上采樣的位置由載頻決定,載頻越高,在極徑上的范圍就越往外移;
在極徑上采樣的長度由發射帶寬決定,發射信號的帶寬越寬,在極徑上采樣的寬度就越寬;
在極角上采樣的范圍由雷達觀測目標時的轉角決定,轉角越大,在頻域上的采集的極角角度就越大。
聚焦上圖,我們可以知道右圖的載頻大于左邊的載頻。在同樣的極角下,范圍更大,即方位分辨率更高。
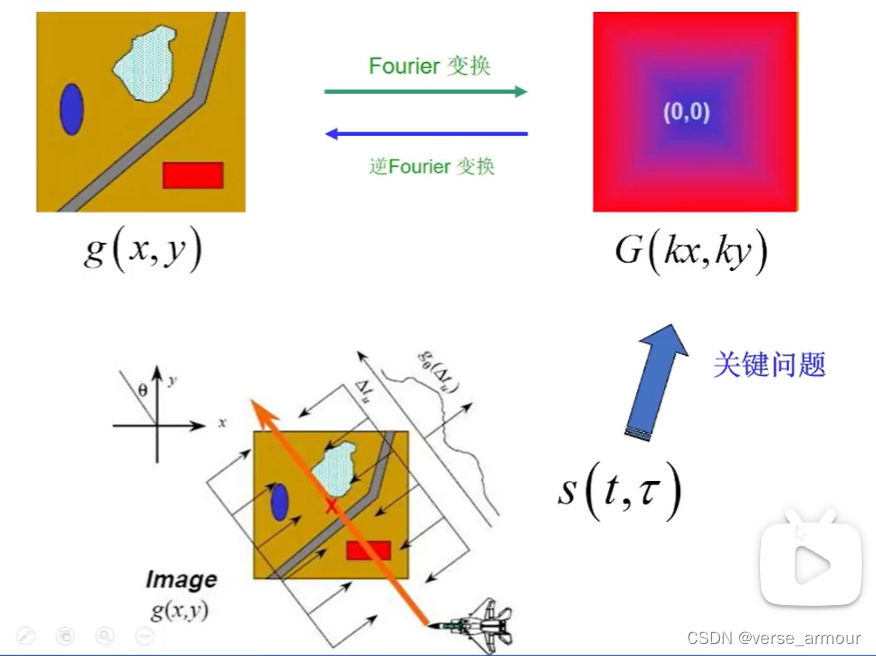
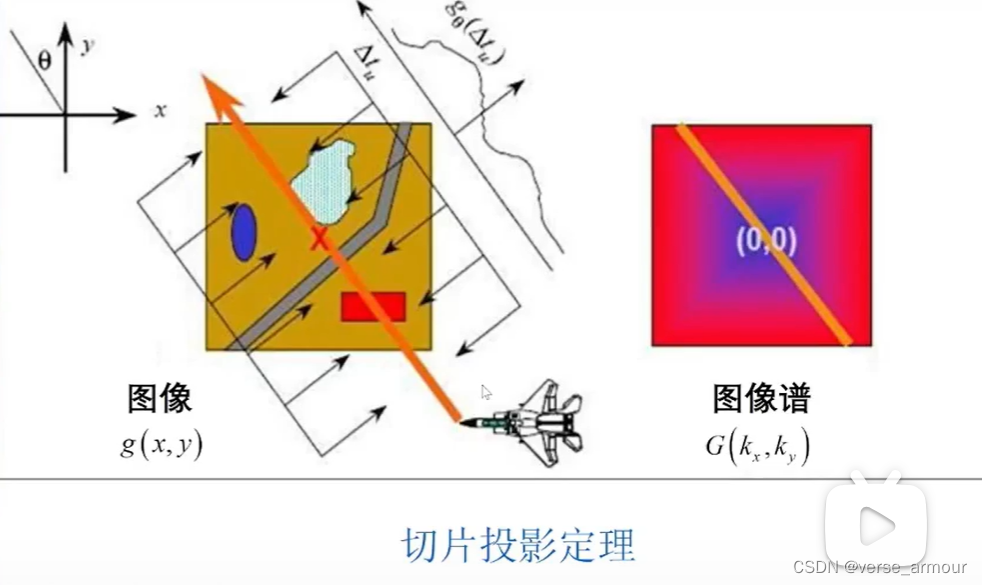
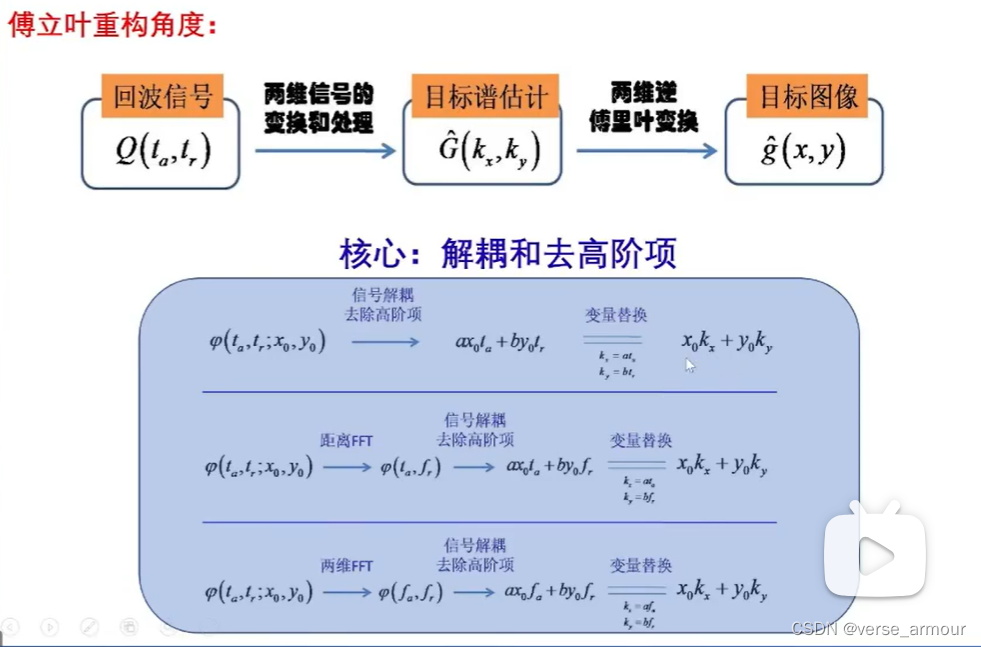
為什么可以從回波信號變換到兩維頻譜?為什么說回波信號就反映了頻譜?——數學原理
這是因為,雷達的回波信號是發射信號和目標函數二維投影的卷積,即回波信號既包含發射信號的信息,也包含了投影的信息。但是發射信號只是一個工具,我們會從回波信號中將發現信號去掉,留下來的就是目標二維函數的一維投影的信息。將一維投影做一個傅里葉變換就可以得到兩維頻譜的切片。
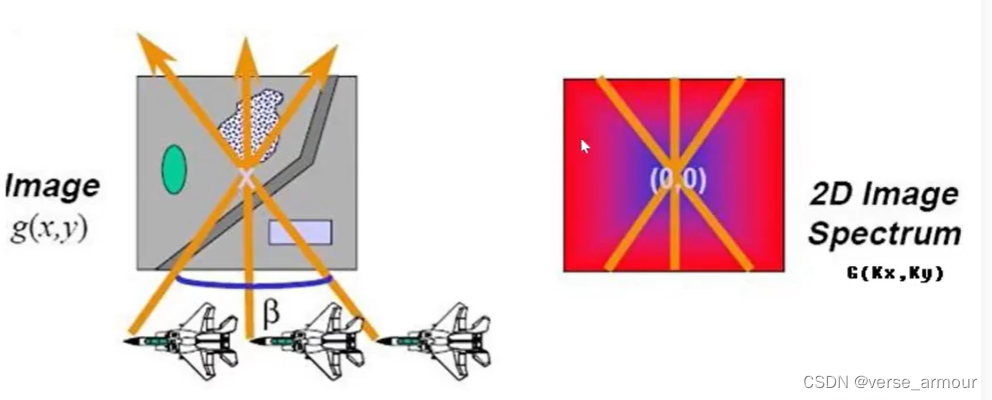
單個脈沖只能得到一個角度的切片:
我們讓雷達發射多個脈沖,可以得到不同角度的頻譜切片。當我們得到足夠多的切片時,我們就能得到一個較為完整的頻譜。
具體的算法實現可能會不一樣。
(3)數學角度理解SAR
離散情況
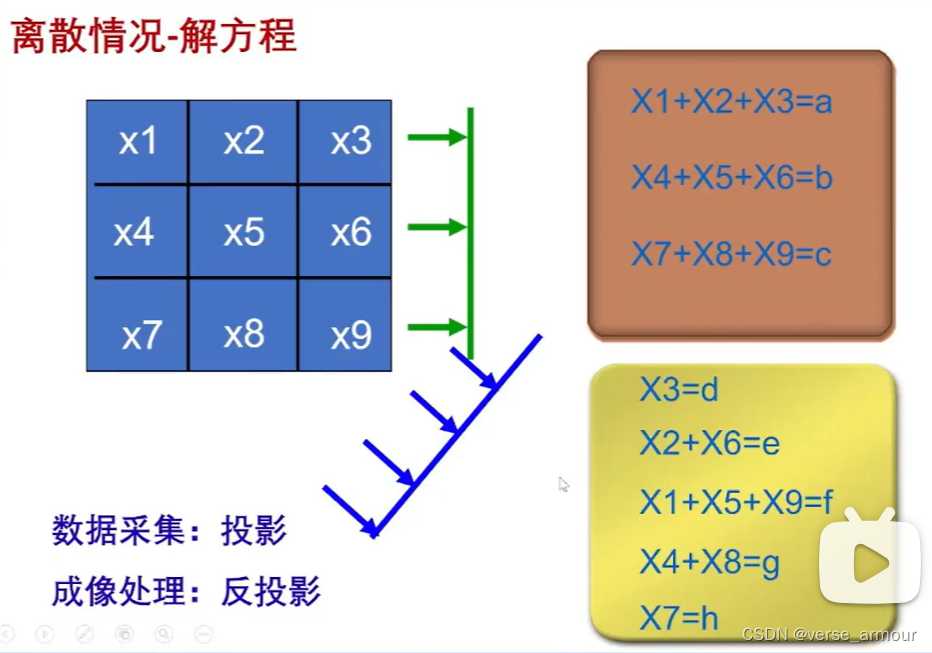
- 數據采集的過程就是投影值測量的過程
- 重構圖像的過程就是解不同角度列的投影值方程組成的方程組過程(這只是數學角度的一個理解,真正工程上去實現的時候,方程組的維度特別大,所以不會有人真的去解這個方程組)
離散情況重構圖像:反投影算法
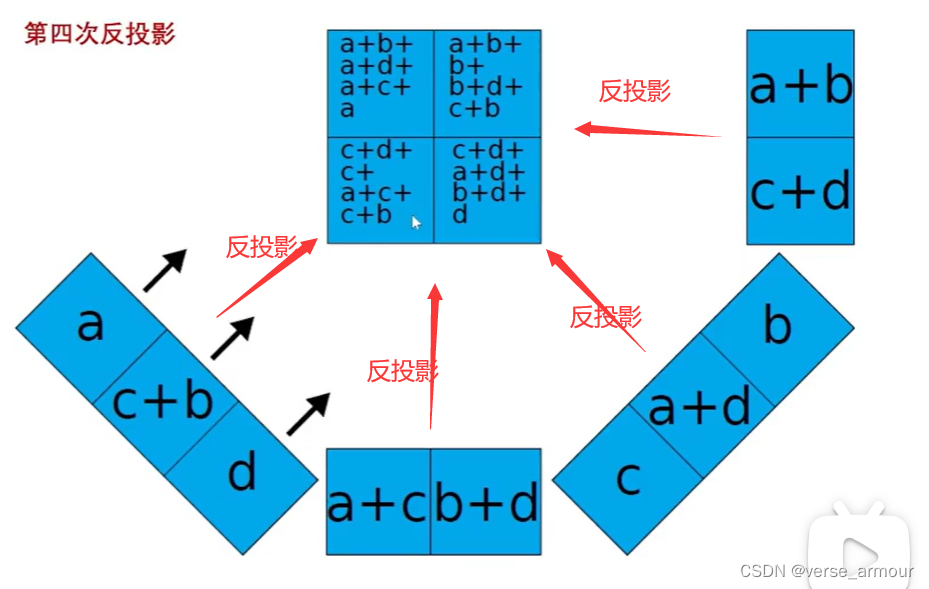
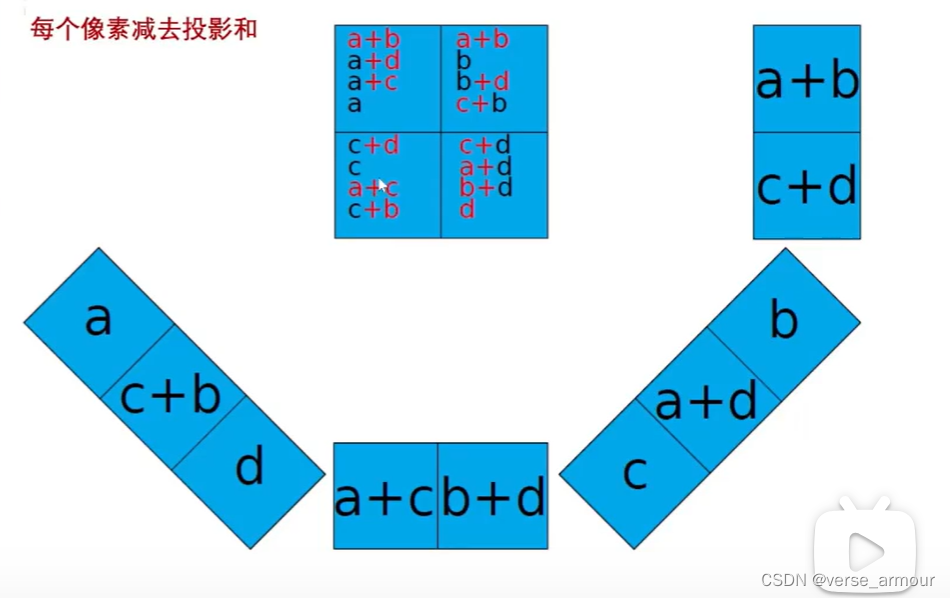
在SAR成像中,加完了就相當于抵消掉了。去掉之后剩下,3a,3b,3c,3d,和原來的就相差一個比例系數。
連續情況
連續情況重構圖像:Randon變換和反變換
- 數據采集:Radon變換的過程
- 圖像重構:Radon反變換的過程
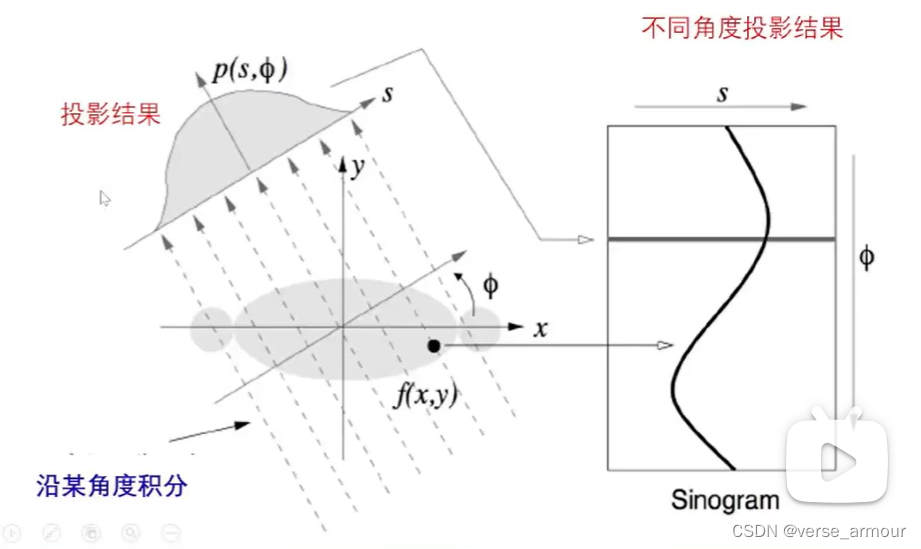
在傳統的Radon變換中,通常是沿著一條直線去投影;但是在SAR成像中,一般是沿著一條弧形去投影。
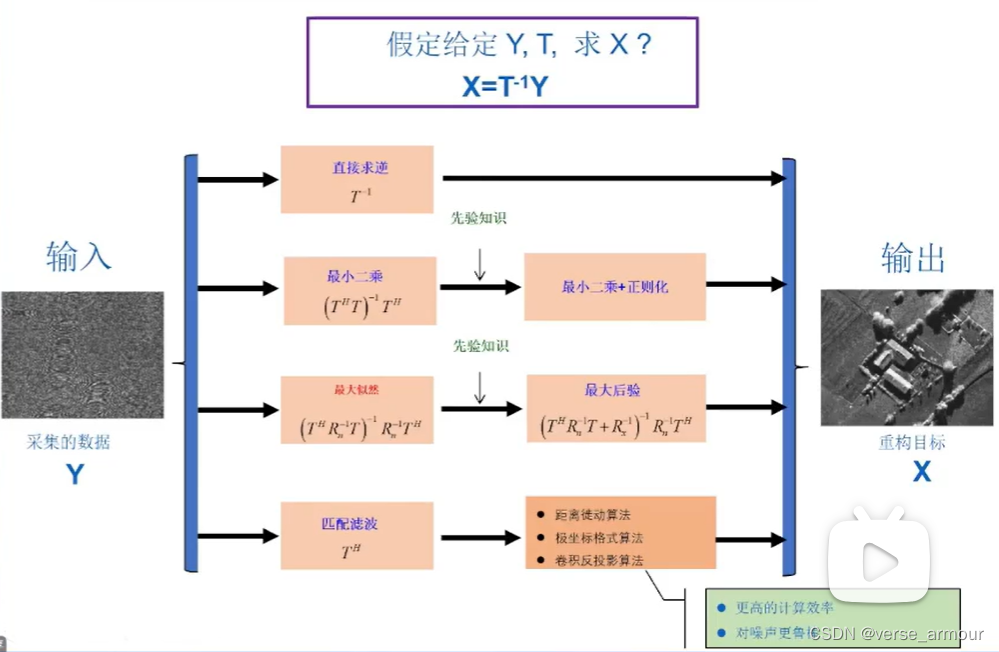
工程上一般會避免矩陣求逆(計算量大,魯棒性差)來求 X X X,一般會用匹配濾波來實現。但這一定程度上犧牲了圖像重構的精度。
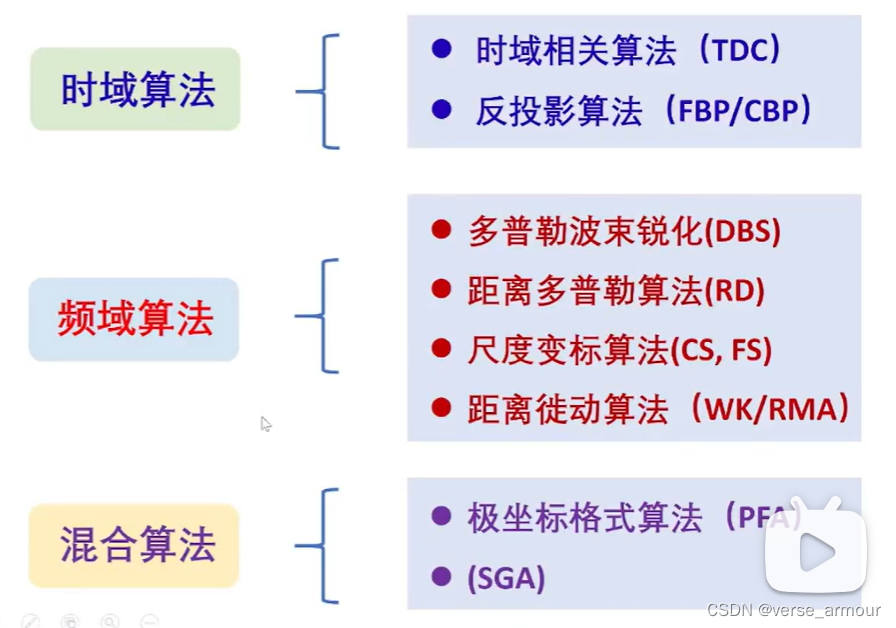
三、SAR成像算法的統一解釋
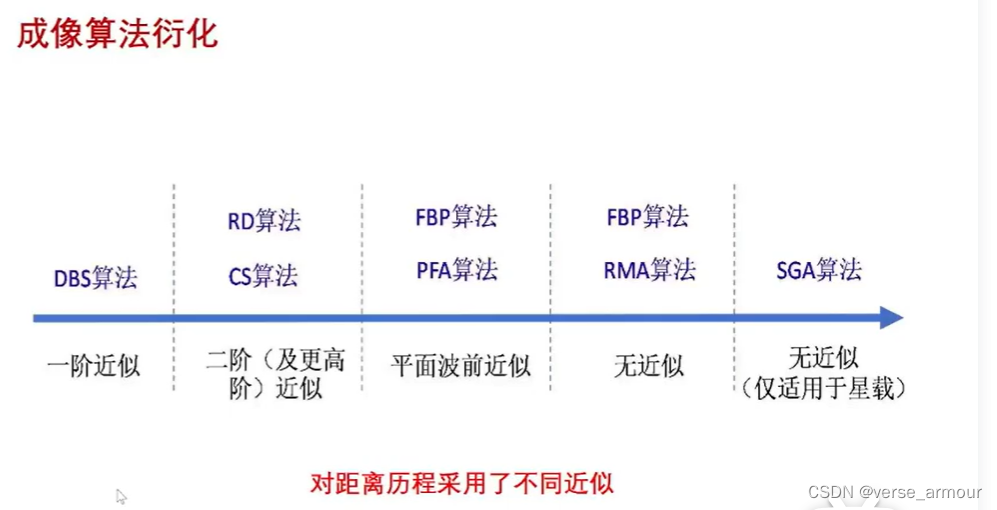
這些算法的本質都是匹配濾波,不同點在于對距離歷程采用了不同近似
適用于星載的SGA算法比較好地解決了軌道彎曲、軌道非共面等問題,沒有對任何距離歷程采取近似。
(1)極坐標格式算法
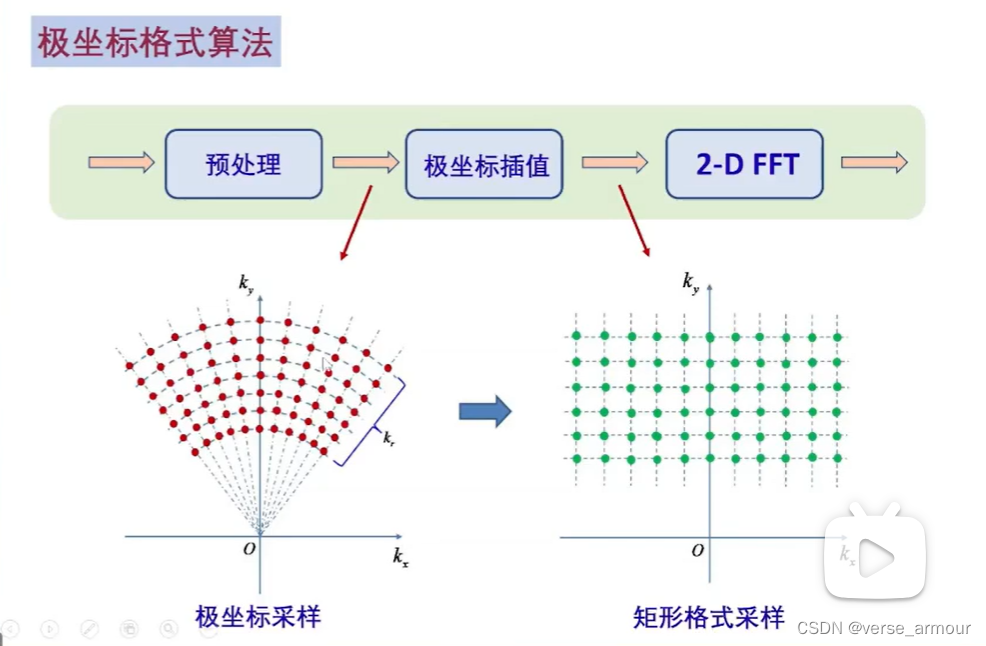
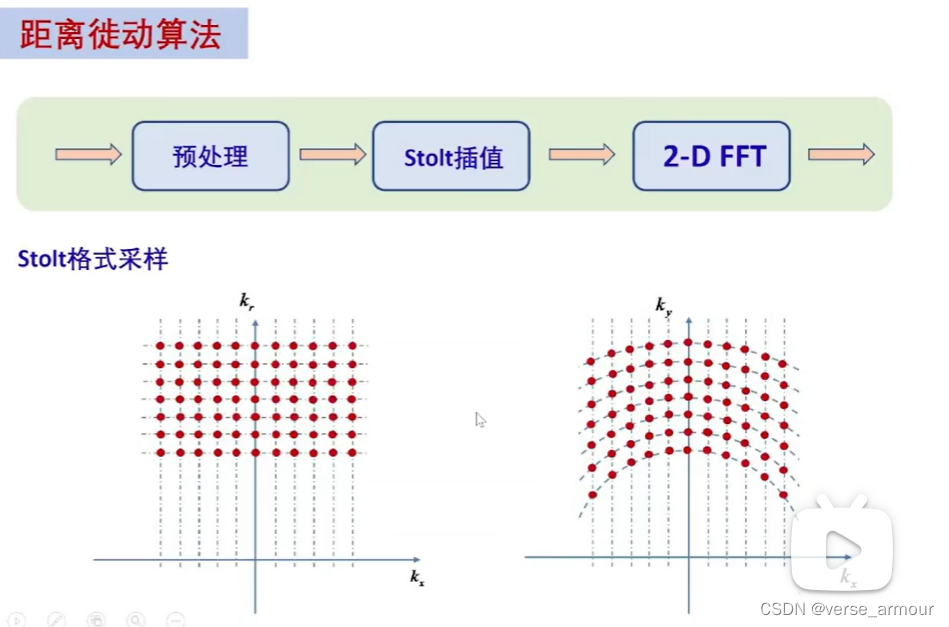
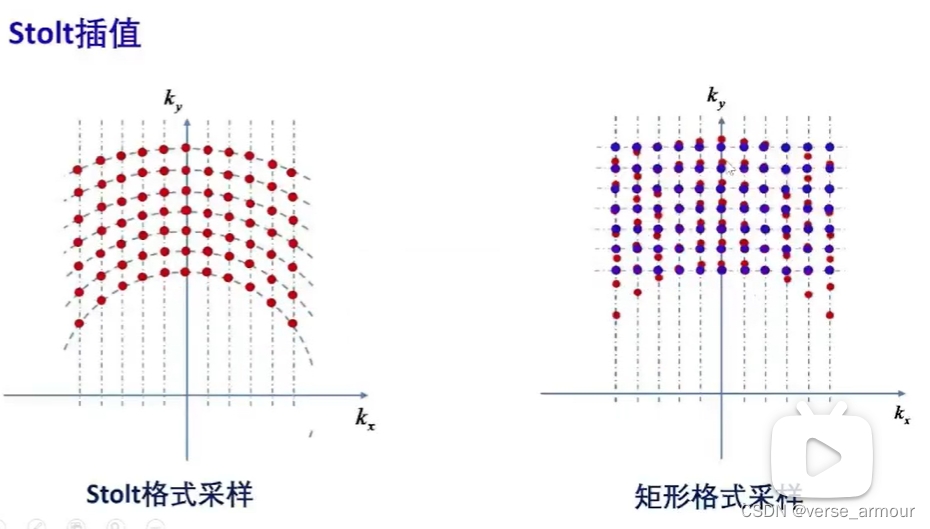
將極坐標采樣通過一個重采樣得到矩形格式采樣,這樣方便使用2-D FFT來進行圖像重構。
極坐標格式轉換
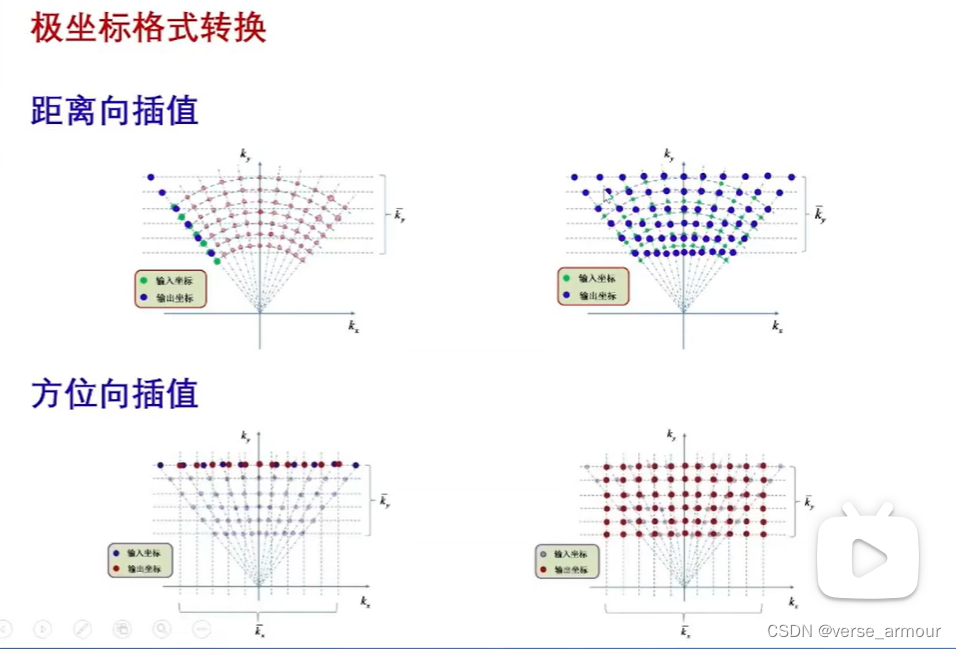
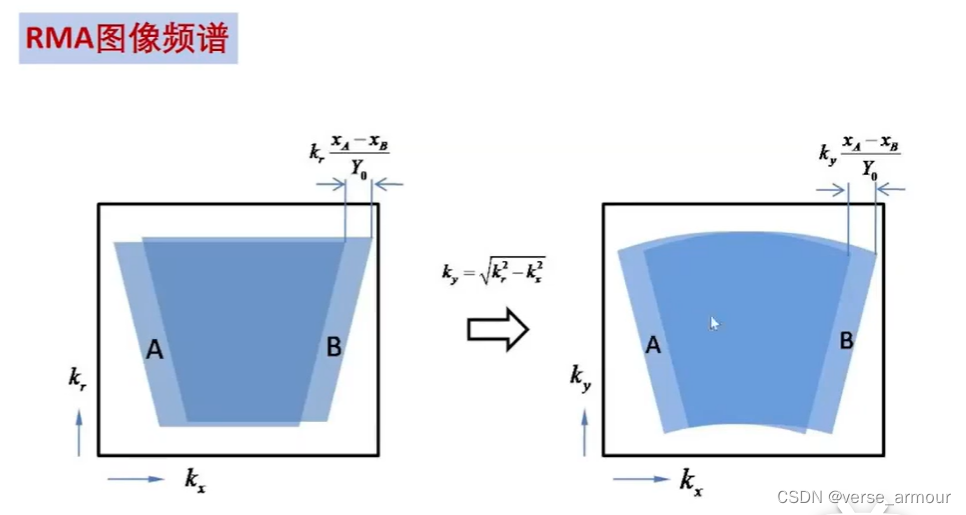
(2)距離徙動算法
(3)卷積反投影算法
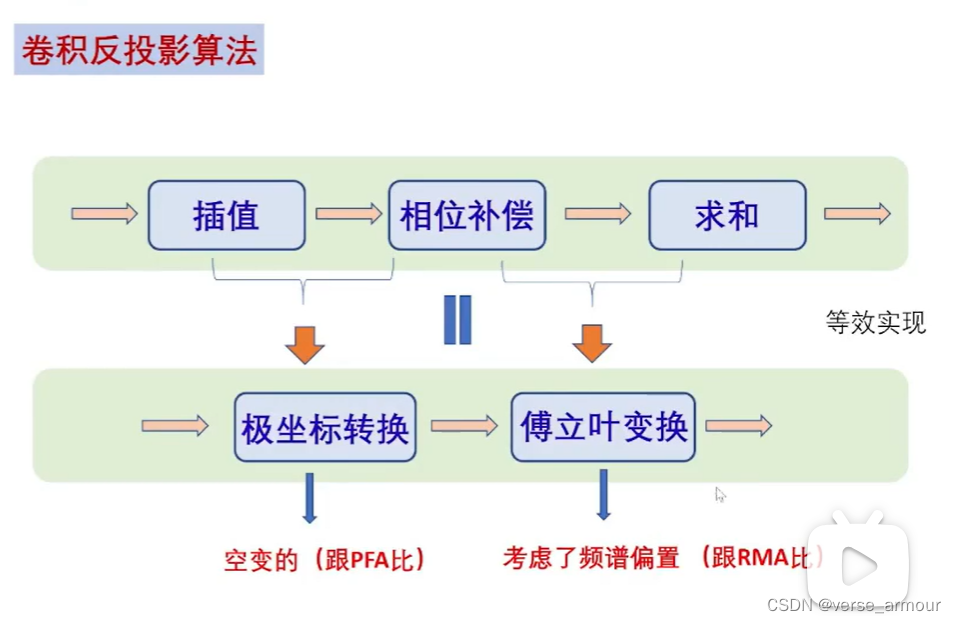
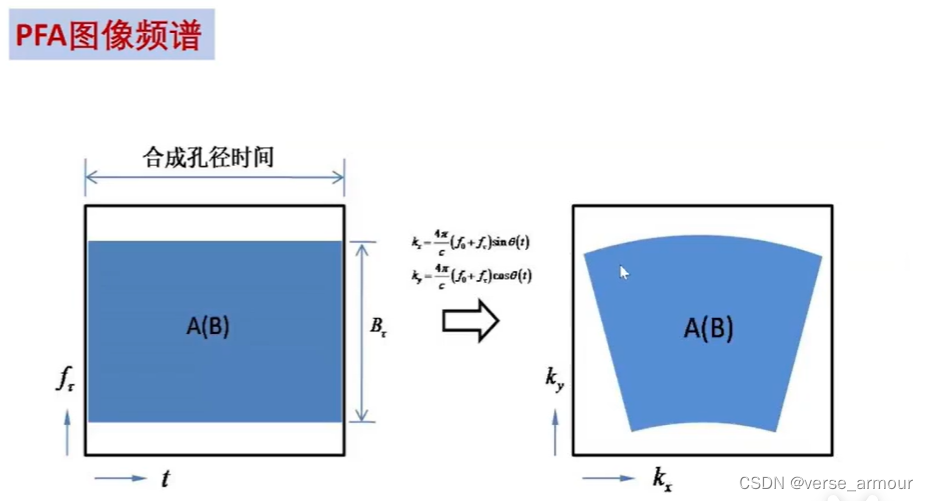
PFA算法認為對于場景中不同點的頻譜都是一樣的。但其實這是不準確的,空間中每個點的兩維頻譜是不一樣的,這也便于理解為什么極坐標格式算法(PFA)是近似的。
主要考慮了方位不同的點,頻譜會在方位上有一個錯位。