目錄
前言
一、光流估計的核心原理
二、光流估計的計算流程
1. 特征提取:找到 “好跟蹤” 的點
2. 光流計算:匹配幀間特征點
三、完整實現步驟(附代碼)
1. 環境準備
2. 步驟 1:處理視頻第一幀
3. 步驟 2:提取第一幀的特征點(角點)
4. 步驟 3:創建軌跡掩膜與顏色
5. 步驟 4:配置光流計算參數
6. 步驟 5:主循環 —— 跟蹤特征點并繪制軌跡
7. 步驟 6:釋放資源
五、總結
前言
在計算機視覺領域,運動目標跟蹤是核心任務之一,而光流估計則是實現該任務的經典技術。它通過捕捉連續圖像幀間像素的運動向量,讓我們直觀地 “看到” 物體的運動軌跡。本文將從原理到代碼,手把手教你用 OpenCV 實現基于 Lucas-Kanade 金字塔光流的運動軌跡繪制,適合有基礎 OpenCV 知識的開發者進階學習。
一、光流估計的核心原理
光流估計并非憑空計算,其準確性依賴三個關鍵假設,這也是所有傳統光流算法的理論基石:
1.亮度恒定假設
同一物體的像素亮度在連續幀間保持不變。這意味著,物體運動是幀間像素變化的唯一原因,排除了光照突變、物體反光等干擾因素(實際應用中需盡量控制光照環境)。
2. 小運動假設
物體在相鄰兩幀間的位移極小,不會出現 “瞬移” 情況。只有滿足這一假設,才能通過像素灰度對位置的偏導數,近似計算像素的運動速度。
3. 空間一致性假設
場景中相鄰的像素點,投影到圖像平面后仍保持相鄰關系,且這些相鄰點屬于同一物體,運動方向和速度一致。這一假設避免了孤立像素的異常運動對整體軌跡的干擾。
二、光流估計的計算流程
要實現運動軌跡繪制,需先明確光流估計的核心步驟 ——特征提取與光流計算,二者相輔相成:
1. 特征提取:找到 “好跟蹤” 的點
光流計算無需跟蹤所有像素,只需聚焦于易識別、易匹配的特征點(如角點、邊緣)。這類點的灰度梯度大,在幀間變化中具有唯一性,跟蹤穩定性更高。
OpenCV 中常用cv2.goodFeaturesToTrack()函數提取角點,該函數能過濾低質量點、避免點過于密集,為后續光流計算提供可靠輸入。
2. 光流計算:匹配幀間特征點
拿到特征點后,需計算其在相鄰幀間的運動向量。常用算法包括:
- Lucas-Kanade 算法:稀疏光流算法,僅計算特征點的光流,速度快、適合實時場景;
- Horn-Schunck 算法:稠密光流算法,計算所有像素的光流,精度高但速度慢;
- 金字塔 Lucas-Kanade 算法:本文使用的優化版本,通過構建圖像金字塔,解決了 “大位移” 場景下的跟蹤失效問題,兼顧速度與精度(對應 OpenCV 函數
cv2.calcOpticalFlowPyrLK())。
三、完整實現步驟(附代碼)
結合上述原理,運動軌跡繪制的整體邏輯為:讀取視頻→提取首幀特征點→創建軌跡掩膜→循環跟蹤特征點并繪制軌跡→顯示結果。下面分步驟拆解實現細節。
1. 環境準備
?
首先確保安裝 OpenCV 和 NumPy(若未安裝,執行以下命令):
pip install opencv-python numpy2. 步驟 1:處理視頻第一幀
視頻跟蹤的起點是第一幀,需先讀取第一幀并轉換為灰度圖(光流計算僅需單通道,減少計算量):
import cv2
import numpy as np# 1. 讀取視頻(替換為你的視頻路徑,支持avi/mp4格式)
cap = cv2.VideoCapture("test.avi") # 示例視頻路徑,需根據實際修改# 2. 讀取第一幀,判斷是否讀取成功
ret, old_frame = cap.read()
if not ret:print("視頻讀取失敗!請檢查文件路徑或視頻格式。")cap.release() # 釋放視頻資源exit()# 3. 將第一幀轉換為灰度圖(光流計算需灰度圖輸入)
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)3. 步驟 2:提取第一幀的特征點(角點)
使用cv2.goodFeaturesToTrack()提取高質量角點,參數需根據實際場景調整:
# 定義特征點檢測參數
feature_params = dict(maxCorners=100, # 最多提取100個角點(避免軌跡過多導致畫面雜亂)qualityLevel=0.3, # 角點質量閾值:僅保留質量≥最強角點質量×0.3的點minDistance=7 # 角點間最小歐氏距離:避免角點過于密集
)# 提取第一幀的角點(mask=None表示全圖檢測,無區域限制)
p0 = cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params)
# p0形狀:(-1, 1, 2),即(角點數量,1,(x,y)坐標),例如(50,1,2)表示50個角點4. 步驟 3:創建軌跡掩膜與顏色
為了不破壞原始視頻幀,我們創建一個全零掩膜(與視頻幀尺寸相同),專門用于繪制軌跡;同時為每個特征點分配隨機顏色,便于區分不同軌跡:
# 創建與視頻幀尺寸、通道數相同的全零掩膜(初始為黑色,后續繪制彩色軌跡)
mask = np.zeros_like(old_frame)# 為每個特征點生成隨機RGB顏色(100個點×3通道,取值0-255)
color = np.random.randint(0, 255, (100, 3)) # 顏色數量與maxCorners一致5. 步驟 4:配置光流計算參數
使用cv2.calcOpticalFlowPyrLK()前,需定義其參數,控制跟蹤精度與速度:
# Lucas-Kanade金字塔光流參數
lk_params = dict(winSize=(15, 15), # 搜索窗口大小:窗口越大,跟蹤范圍越廣,但速度越慢maxLevel=2, # 金字塔最大層級:2表示使用原始圖+2層下采樣圖,解決大位移問題criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03)# 迭代終止條件:迭代10次或誤差小于0.03時停止,平衡精度與速度
)6. 步驟 5:主循環 —— 跟蹤特征點并繪制軌跡
這是核心環節:循環讀取每一幀,計算光流、篩選有效特征點、繪制軌跡,并更新 “上一幀” 數據用于下次計算。
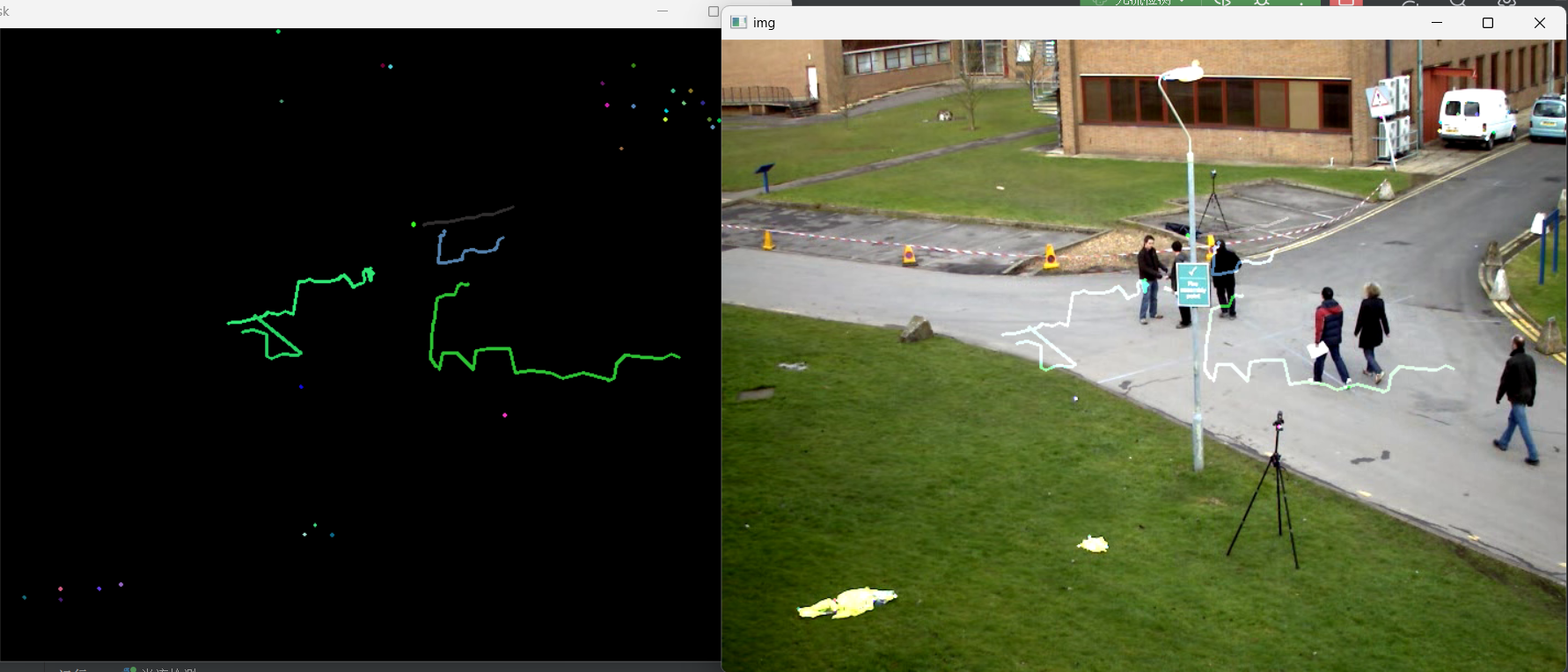
while True:# 1. 讀取當前幀ret, frame = cap.read()if not ret: # 若讀取失敗(如視頻結束),退出循環break# 2. 將當前幀轉換為灰度圖frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# 3. 計算光流:匹配上一幀特征點(p0)在當前幀的位置# p1:當前幀特征點坐標;st:跟蹤狀態(1=成功,0=失敗);err:跟蹤誤差p1, st, err = cv2.calcOpticalFlowPyrLK(prevImg=old_gray, # 上一幀灰度圖nextImg=frame_gray, # 當前幀灰度圖prevPts=p0, # 上一幀特征點nextPts=None, # 輸出當前幀特征點(設為None自動分配)**lk_params # 光流參數)# 4. 篩選跟蹤成功的特征點(僅保留st=1的點)good_new = p1[st == 1] # 當前幀有效特征點good_old = p0[st == 1] # 上一幀對應有效特征點# 5. 繪制軌跡:在掩膜上連接“上一幀點”與“當前幀點”for i, (new, old) in enumerate(zip(good_new, good_old)):# 提取坐標并轉換為整數(像素坐標需為整數)x_new, y_new = new.ravel() # ravel()將數組展平為一維x_old, y_old = old.ravel()# 轉換為整數(避免繪圖時因浮點數報錯)x_new, y_new, x_old, y_old = map(int, [x_new, y_new, x_old, y_old])# 在掩膜上繪制線段:連接上一幀點與當前幀點mask = cv2.line(img=mask, # 繪制目標:掩膜pt1=(x_new, y_new),# 當前幀點pt2=(x_old, y_old),# 上一幀點color=color[i].tolist(), # 軌跡顏色(與特征點對應)thickness=2 # 線段粗細)# 6. 生成最終圖像:將掩膜(軌跡)疊加到原始幀上result = cv2.add(frame, mask) # 圖像疊加,軌跡覆蓋在視頻上# 7. 顯示結果cv2.imshow("Motion Trajectory", result) # 顯示帶軌跡的視頻cv2.imshow("Mask Only", mask) # 單獨顯示軌跡掩膜(可選)# 8. 按鍵控制:按下Esc鍵(ASCII碼27)退出循環k = cv2.waitKey(30) & 0xFF # 等待30ms(控制視頻播放速度)if k == 27:break# 9. 更新“上一幀”數據:為下一循環做準備old_gray = frame_gray.copy() # 上一幀灰度圖更新為當前幀p0 = good_new.reshape(-1, 1, 2) # 上一幀特征點更新為當前幀有效點(調整形狀)7. 步驟 6:釋放資源
循環結束后,需釋放視頻捕獲對象與銷毀 OpenCV 窗口,避免內存泄漏:
# 釋放視頻資源
cap.release()
# 銷毀所有OpenCV窗口
cv2.destroyAllWindows()運行結果如下:為一個視頻檢測人們的運動軌跡
五、總結
本文通過 OpenCV 實現了基于 Lucas-Kanade 金字塔光流的運動軌跡繪制,核心邏輯是 “提取特征點→跟蹤特征點→繪制幀間連線”。該方法兼顧實時性與精度,適用于攝像頭監控、車輛跟蹤、機器人視覺等場景。
掌握光流估計后,可進一步探索更復雜的應用,如結合目標檢測(如 YOLO)實現特定物體的軌跡跟蹤,或使用稠密光流算法(如cv2.calcOpticalFlowFarneback())獲取全像素運動信息。
希望本文能幫助你理解光流估計的實踐邏輯,動手嘗試調整參數,感受不同場景下的軌跡繪制效果吧!






--Java版)


)









