1. 研究背景與動機?
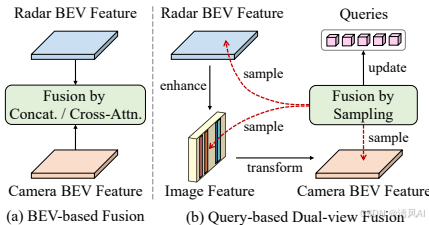
- ?問題?:現有雷達-相機融合方法依賴BEV特征融合,但相機圖像到BEV的轉換因深度估計不準確導致特征錯位;雷達BEV特征稀疏,相機BEV特征因深度誤差存在畸變。
- ?核心思路?:提出跨視角查詢融合框架,通過對象查詢(object queries)同時采樣圖像視角(原始圖像)和BEV視角的特征,解決異質特征對齊問題。
2. 核心創新點?
?2.1 環形可調密度查詢初始化?
- ?設計?:將查詢點分布在同心圓上,內圈查詢數少(80個),外圈按線性因子α(≈1.25)遞增。例:nuScenes設置6圈,總查詢數900。
- ?優勢?:解決徑向初始化(RayFormer)在遠距離查詢稀疏的問題,適配傳感器投影特性。








微服務)
——計算機網絡參考模型與子網劃分)





)



