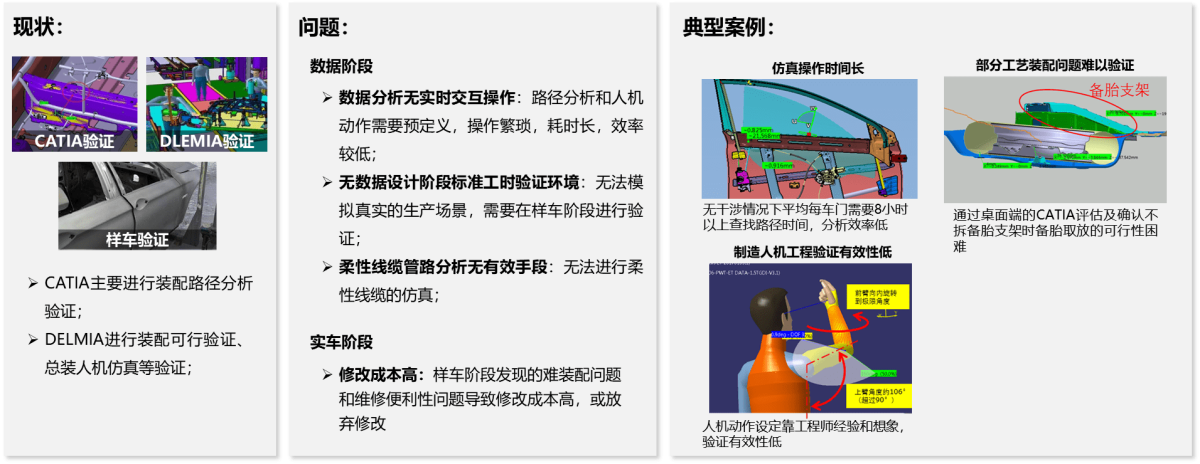
一、現狀
在制造業數字化轉型浪潮中,傳統裝配過程仍面臨諸多挑戰:物理樣機試錯成本高、裝配周期冗長、工藝優化依賴經驗、跨部門協作效率低下……如何打破“試錯-返工”的惡性循環?
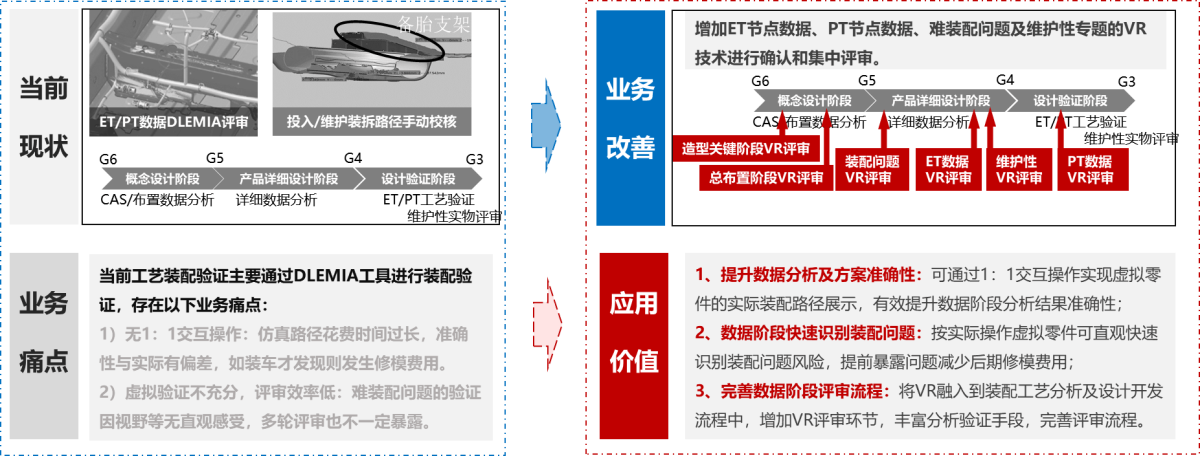
目前總裝工藝通過DELMIA、NX、Creo等工程軟件進行工藝裝配驗證。驗證方式多是在電腦屏上通過鼠標移動物體坐標軸進行,沉浸感不強,操作過于主觀不自然,人機驗證效率較低、感知差,導致某些設計問題難以在數據階段發現。
因此,將虛擬代替真實,以虛擬現實(VR)與數字孿生技術為核心,為制造業提供從設計到生產的全鏈路裝配革新,讓裝配過程“所見即所得”,開啟智能制造的“低成本、零試錯”時代。
二、業務需求
大幅縮短研發周期:
?可以快速進行樣件的裝配驗證,無需等待實物樣件的制作。產品研發和迭代的速度可得到顯著提升,從而滿足設計方案快速迭代后的裝配驗證需求。
降低成本:
?可以在虛擬模擬階段進行工藝驗證和優化,減少實物樣件的制作數量。節省大量的材料成本與人工成本,提高企業的整體競爭力。
實時更新:
?設計師可以快速調整設計方案,并實時查看效果。大幅提高設計效率,避免了因實物樣件制作周期長而導致的無法快速響應方案變化的 問題。
降低安全隱患:
?有效避免新品驗證或新手操作不當導致的不可預估的安全風險。同時,驗證結束后,可將結果輸出,對員工進行培訓,提高其操作技能和安全意識。
更具人性化設計:
?將操作人員舒適性納入到工藝裝配考慮因素中,提前進行操作人員裝配可行性、舒適性、疲勞性分析,優化工器具與結構設計。
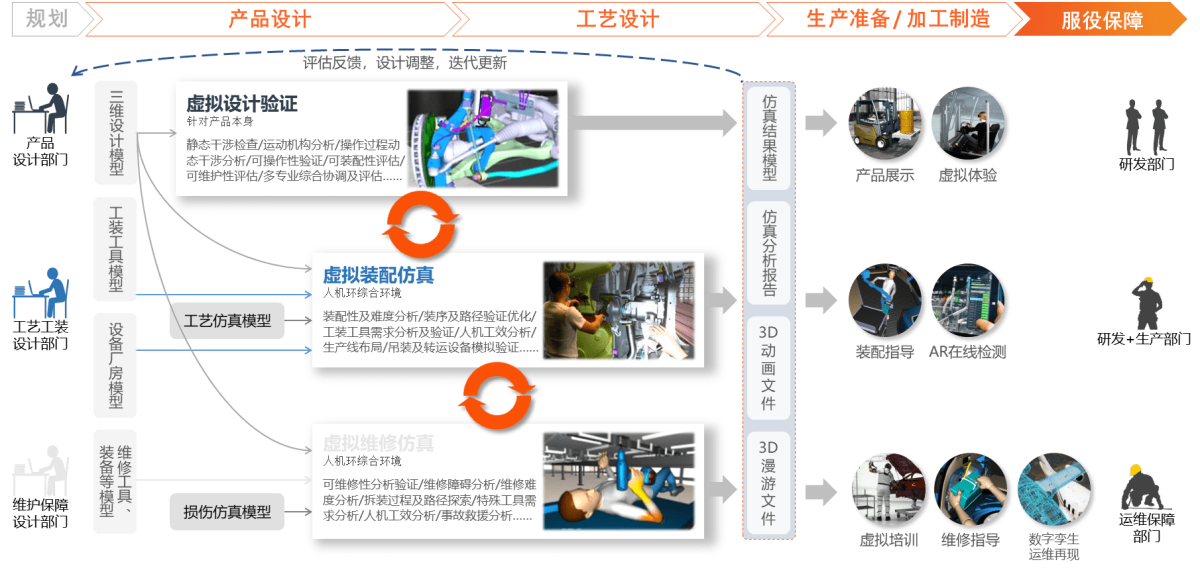
三、產品定位
基于產品研發流程中的各重要環節,響應各部門需求。
四、系統方案
系統簡介
北京和遠科技提供的方案通過基于精確幾何模型及零部件物理特性的真實模擬,及人機環的綜合分析,并結合虛擬現實硬件設備,實現對產品的使用操作、裝配過程、維修維護過程的仿真驗證,及作為交互式的虛擬協調評價平臺。
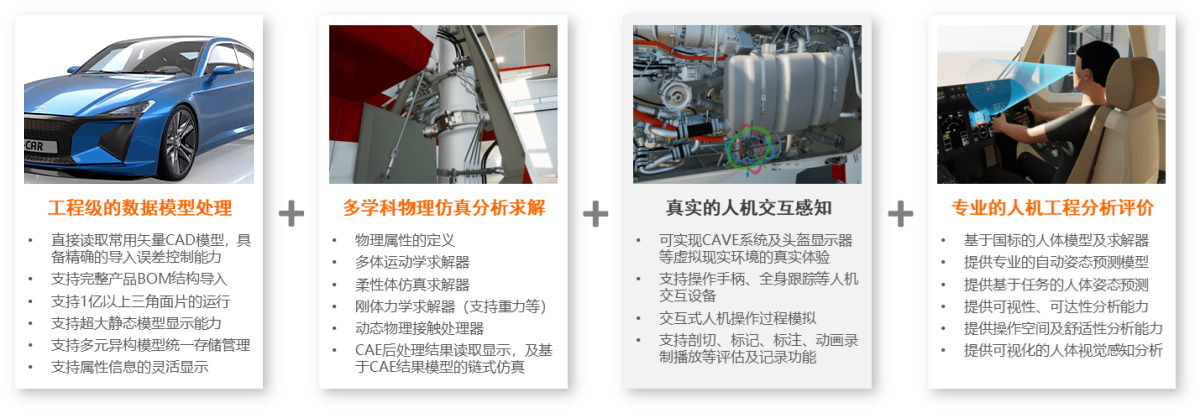
1. 優勢:
兼容大部分工程數據格式,準確保留數據層級關系;
提供高精度裝配驗證(容差功能,模擬加工誤差下的間隙、過渡、過盈裝配);
能夠提供(圓形截面)柔性線纜的裝配驗證;
提供多種仿真求解器,提供接近真實的裝配仿真結果,包括:多體運動學求解器,剛體力學求解器,動態物理接觸處理器,物理光學分析求解器等。(支持重力、慣性、阻力等屬性,動態碰撞、推動、干涉檢查)
準確的模型
支持十萬數量級零部件的高精度模型導入與流暢運行;
支持從設計模型中獲取零部件BOM結構、屬性信息及質量、質心、慣性積、材料等物理特性。
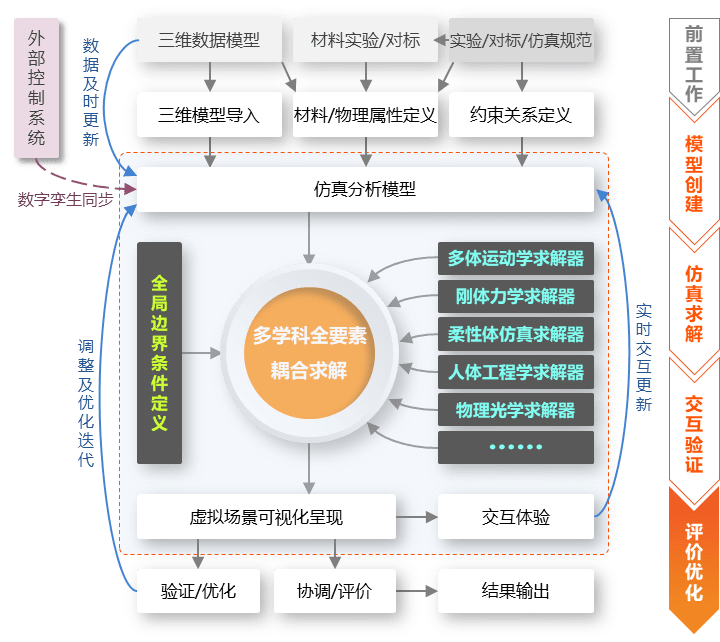
統一的環境
全局的邊界條件、零部件的材料物理特性,在所有仿真模擬過程中實時有效;
所有功能均在統一的軟件環境下實現聯合仿真、耦合求解。
專業求解器
經典、高效的求解算法,通過對標確認仿真結果的可信度;
經過了全球多家大型裝備制造業企業充分的工程驗證;
達到最接近真實的仿真模擬結果。
真實的體驗支持各類通用交互設備,支持人對虛擬零部件的抓握、推動、操控等真實操作體驗; 通過交互操作,保證了在人員操作時,零部件對象的真實響應效果。
2. 硬件包含:
立體顯示屏:提供沉浸式立體評審環境,模型以1:1比例呈現在眼前,可進行模型結構干涉情況的查看與評審,也可支撐多人參觀匯報展示。
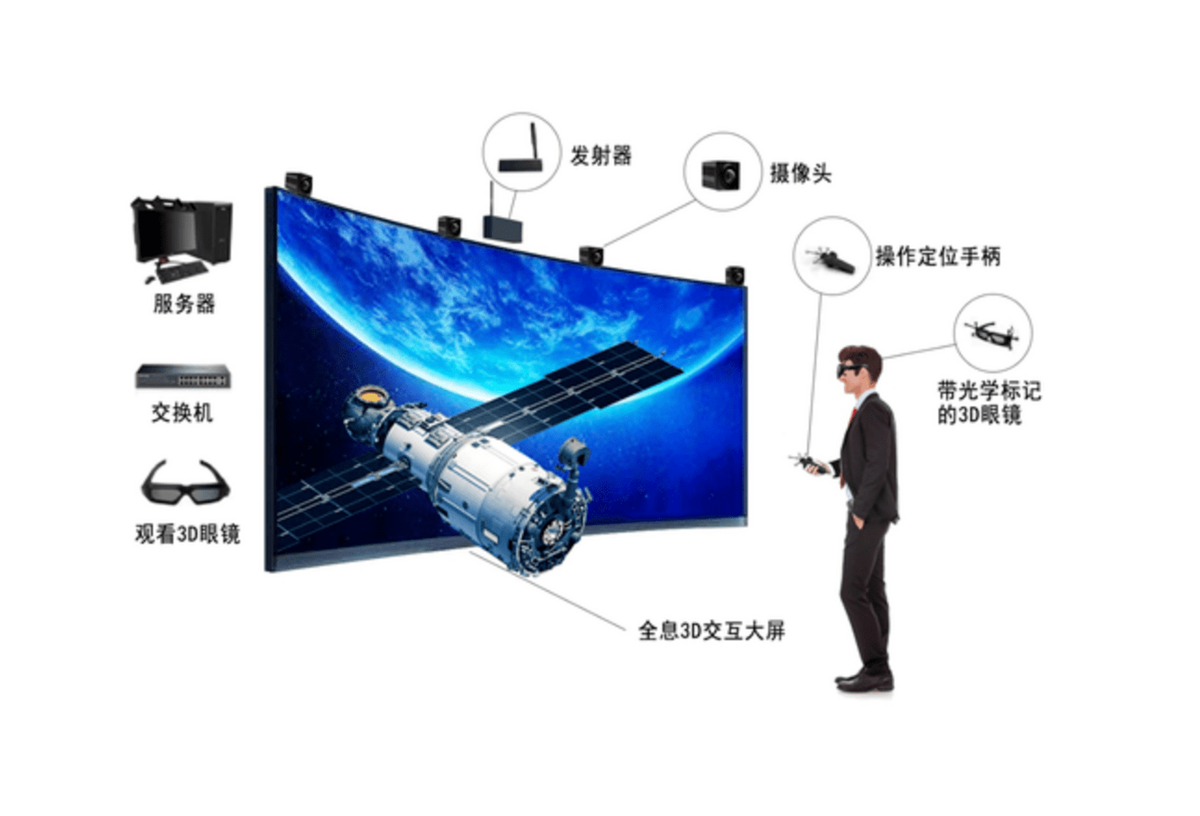
光學空間定位系統:提供高精度的定位追蹤能力,在虛擬裝配過程中提供人體追蹤與樣件追蹤,提供真實的裝配體驗;主要包含:定位攝像頭、全身動作捕捉套件等。
頭戴式顯示設備:提供接近人體真實視野的第一人稱主視角評審能力;
功能模塊簡介
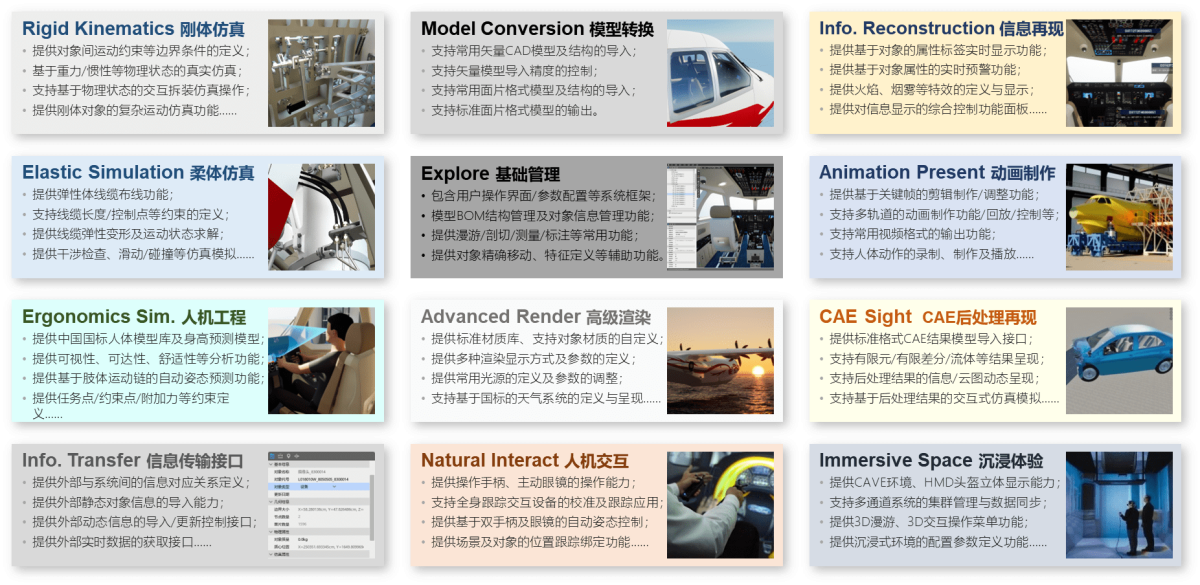
1. Model Conversion 模型轉換模塊
矢量模型導入的精度控制
支持CATIA、PTC Creo、Siemens NX、SolidWorks、STP、IGS、3dxml等常用矢量CAD文件模型及結構的直接讀取;
在矢量模型導入過程中,可定義弦公差、最大邊長、最大法線角等多種幾何精度導入控制選項;
支持JT、FBX、OBJ、glTF等常用面片格式模型的導入。
零部件BOM結構的完整繼承
能夠完整導入模型的BOM結構;
能夠完整繼承各零部件的代號、顏色、材質等信息。
完整便捷的模型處理能力
提供針對BOM結構的調整功能;
提供精確位移、精確裝配等模型處理功能;
提供模型拆分、合并、復制、刪除等常用模型操作功能。
2. Explore 基礎管理模塊
操作界面及模型數據管理
便捷的用戶操作界面及系統參數配置;
提供設計BOM、仿真BOM等模型結構管理功能;
提供零部件對象屬性的自定義及管理功能;
提供各類資源庫的管理功能。
常用操作功能的支持
提供場景漫游瀏覽、模型定位等可視化操作功能;
提供剖切、測量、標注等常用功能;
提供對象捕捉、坐標系、多窗口管理、等系統設置。
導入即使用,無需輕量化及簡化處理
輕量化及簡化處理的弊端:
輕量化處理將導致仿真模型精確下降;
面片簡化將導致零部件物理特性的混亂;
結構簡化將導致零部件模型及屬性與原始模型的相關性喪失。
3. Rigid Kinematics 剛性運動仿真模塊
豐富的邊界條件定義功能
支持仿真對象質量、阻尼等仿真屬性的定義;
支持轉動、滑動、球鉸、平面等位置約束條件的定義;
支持齒輪、齒條、渦輪/渦桿等運動約束的定義;
提供重力場、碰撞、阻尼等全局參數控制能力。
專業的多剛體動力學求解器
支持多閉環約束鏈、嵌套約束鏈等復雜機構運動的實時求解;
支持零部件運動極限位置的停止、吸附/脫離計算;
支持基于驅動力的多剛體運動實時仿真求解及交互操作;
支持重力場、慣性、碰撞、阻尼等對多剛體運動的耦合求解。
高精度的多體碰撞耦合算法
提供高精度的多剛體碰撞邊界求解算法;
支持基于高精度靜態及動態干涉檢查;
支持與柔性體仿真的耦合求解能力。
4. Elastic Simulation 柔性體仿真模塊
支持柔性體管線的創建與布線
支持基于起始/終止點及線纜長度創建管線;
支持線纜控制點的定義;
支持線纜直徑、剛度等參數的定義。
基于物理屬性的柔性體仿真求解
提供基于物理屬性的柔性體仿真求解器;
提供重力場、碰撞等全局參數控制能力;
提供最小彎曲半徑等的定義及極限狀態的高亮顯示。
與其它求解器的實時耦合求解計算
支持與周邊剛體的滑動、碰撞等耦合求解計算;
支持與運動部件的位置約束條件的定義;
支持與運動部件的運動變形耦合求解。
5. Ergonomics Simulation 人機工程仿真模塊
完整的符合國標的人體模型庫
人體模型庫中模型完全符合中國現行國家標準;
具備不同性別、不同年齡段、不同百分位的完整人體模板;
提供人體模板庫、人體姿態庫的管理功能;
提供站姿、坐姿等標準模板;提供頭發/鞋子、衣服等選項。
基于任務的姿態預測求解算法
支持基于逆向運動學的人體姿態求解算法;
提供雙手、頭部、視點的操作任務目標定義;
人體姿態求解算法支持任務目標位置的趨勢鎖定功能。
豐富的人機工程仿真分析功能
提供人體視錐、視域、視野、視線的分析及結果可視化呈現;
提供人體雙手可達性范圍分析及結果可視化呈現;
提供基于幾何及RULA算法的舒適性分析及結果可視化呈現;
提供人體視野遮擋分析等視覺感知分析及結果可視化呈現。
6. CAE Sight CAE后處理結果再現模塊
常用格式的CAE后處理結果的導入
支持有限元、有限差分、流程等多種常用格式的CAE后處理結果的導入功能;
支持CAE后處理結果各類網格節點屬性的導入及管理功能。
CAE后處理結果的可視化呈現
支持以云圖方式對CAE后處理結果模型進行呈現;
支持對結果模型的材質定義及高級渲染;
支持鏈式仿真結果模型的播放呈現;
支持CAE后處理結果節點數據的實時獲取與呈現。
CAE后處理結果模型的耦合仿真
具備基于CAE后處理結果模型與其它求解器的鏈式耦合仿真能力;
可將仿真結果與場景中的其它對象、運動狀態、假人模型等進行綜合呈現。
7. Advanced Render 高級渲染模塊
高效便捷的對象材質定義功能
提供了標準材質資源庫;
支持對象材質屬性參數的自定義功能;
支持對零部件材質的批量賦予操作;
提供了對零部件對象UV坐標、表面法向等的編輯功能。
豐富的渲染環境定義功能
提供了點光源、聚光燈、平行光等常用光源的定義功能;
提供了基于時間系統的光照環境定義功能;
提供了豐富的天氣環境系統,支持風云雨雪等常用天氣;
提供了海洋、煙霧、火焰等豐富的特效資源庫。
實時高質量渲染及全局參數定義
支持全局光照的實時渲染能力;
提供對陰影、反射等渲染算法;
提供對渲染方式、抗鋸齒等各類渲染質量的全局控制功能;
支持多窗口視圖等顯示界面控制功能。
8. Animation Present 動畫展示模塊
簡潔的動畫生成方式
支持基于關鍵幀的零部件運動軌跡剪動畫輯制作;
支持零部件運動軌跡的錄制;
支持剪輯組的定義與編輯,提供動畫剪輯的結構話管理功能;
支持多軌道動畫的制作、編輯與回放過程控制等功能。
豐富的動畫支持能力
支持零部件運動軌跡動畫的定義;
支持零部件可見性、材質等多種動畫類型的定義;
支持攝像機動畫軌跡的定義;
支持特效運動軌跡及可見性動畫類型的定義。
與仿真過程的結合應用
支持機構運動仿真過程的動畫錄制與回放;
支持人體模型及全身跟蹤的動畫錄制與回放;
支持動畫觸發器的定義。
9. Natural Interact 人機交互模塊
常用人機交互設備的支持
支持ART頭部跟蹤標記物、雙手操作手柄的使用;
支持ART全身跟蹤標記物的使用;
支持HTCVIVE、PICO等頭盔顯示器及跟蹤手柄的使用。
提供人機交互設備的操作功能
提供人機交互設備的高精度校準功能;
支持使用操作手柄的場景漫游及對物體的操作功能;
支持全身跟蹤標記物對人體模型的跟蹤控制功能。
專業的人體姿態跟蹤控制
具備高精度的人體跟蹤求解算法;
可支持對不同身高、性別人體模型的準確姿態控制;
支持全身跟蹤人體動作的錄制與回放。
10. Immersive Space 沉浸體驗模塊
VR沉浸式硬件環境支持
采用沉浸式主動立體3D顯示技術;
支持投影機、LED屏、DLP屏、頭盔顯示器等3D硬件設備;
支持單通道顯示、CAVE系統顯示、頭盔顯示等3D顯示輸出。
豐富的沉浸式環境操作功能
提供3D交互式操作菜單;
提供沉浸式環境的配置參數定義功能;
提供導航方式定義、操作速度等定義功能;
支持頭部跟蹤與固定視點方式的切換。
完善的硬件環境通訊與控制
支持多通道系統的集群管理功能;
支持各渲染機間的數據同步;
提供針對沉浸式硬件環境的配置能力。
11. Info. Reconstruction 信息再現模塊
靈活的對象屬性定義與管理能力
提供基于對象類別的屬性自定義功能;
提供專門的屬性管理界面及信息顯示管理界面;
提供基于對象的標簽屬性特效顯示功能;
支持信息顯示方式的自定義。
支持多元異構信息的集中呈現
支持對零部件代號、名稱、質量等屬性的顯示;
支持圖片、視頻流等多媒體數據信息的顯示;
提供基于對象屬性的實時預警判斷及高亮預警顯示功能。
豐富的信息集中顯示管理面板
提供對信息顯示的總體控制面板功能;
支持根據對象類別、信息類型等的篩選顯示控制;
支持根據選中對象、觸碰對象、距離遠近等多種顯示方式;
提供對信息顯示樣式的集中控制。
12. Info. Transfer 信息傳輸模塊
標準化的信息通訊傳輸接口
提供用于零部件屬性及操控信息的API二次開發接口;
提供標準的、可配置的信息同步傳輸中間件模塊。
靈活的信息傳輸方式
提供外部靜態信息的導入功能;
提供外部動態信息的導入/更新控制接口;
提供外部實時數據的獲取接口;
提供系統信息逆向輸出接口。
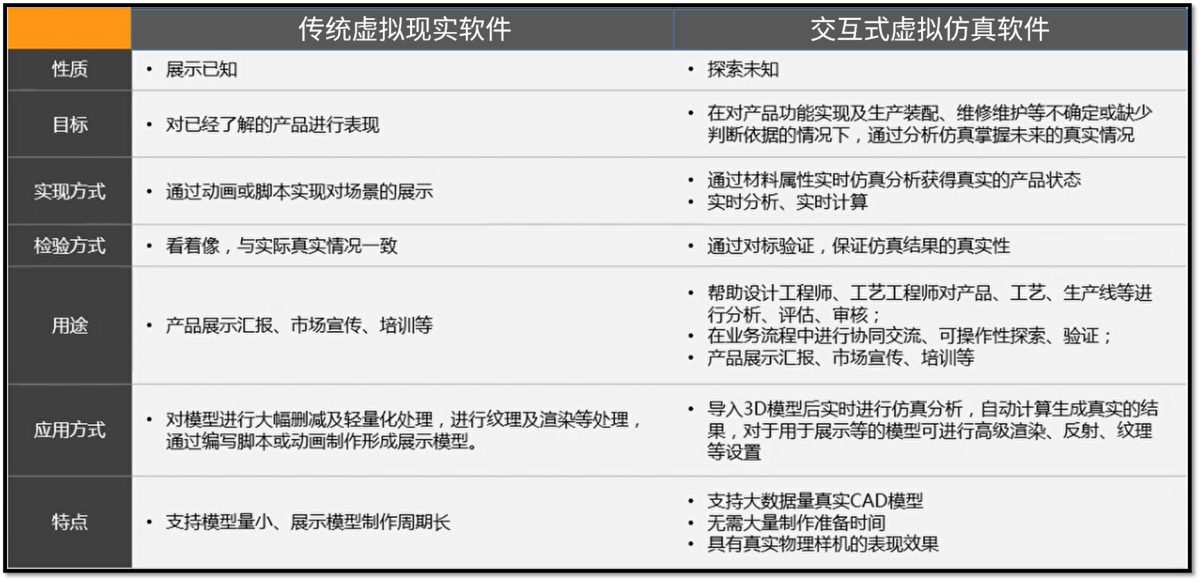
五、傳統虛擬現實軟件與交互式虛擬仿真軟件的對比
六、結論
通過本套虛擬裝配解決方案,可為您提供以下核心價值:
高效預演,規避風險
實時碰撞檢測、物理仿真引擎,高精度模擬零部件裝配路徑,提前識別干涉與公差問題,降低50%以上物理樣機試錯成本。 支持柔性線纜、復雜機構動態仿真,覆蓋汽車、航空、工業設備等全場景裝配需求。
智能優化,效率倍增
智能算法驅動裝配序列規劃,自動生成最優裝配路徑與工藝文檔,縮短裝配周期30%以上。 沉浸式交互環境+力反饋設備,讓工程師“親手”驗證裝配可行性,提升設計迭代速度。
跨部門協同,打破信息孤島
支持設計、制造、生產部門的裝配驗證需求,實時同步修改與評審,減少70%溝通成本。 支持多人異地協作,通過VR頭盔/數據手套實現1:1真實操作,裝配工藝秒變“可視化標準”。
數據閉環,驅動持續改進
全程記錄裝配操作數據,生成人機分析報告,為工藝優化提供精準決策依據。 直接加載CAD模型數據,繼承BOM層級關系,與PLM/MES系統無縫集成,形成“設計-仿真-生產”全鏈路數字化閉環。



)


--字符指針變量,數組指針變量,二維數組傳參的本質,函數指針變量,函數指針數組)





流程)

創建型:單例模式詳解)




![[NOIP2002 提高組] 均分紙牌](http://pic.xiahunao.cn/[NOIP2002 提高組] 均分紙牌)