新建終端,執行命令
roslaunch wpr_simulation wpb_simple.launch ?在新建終端,執行命令
roslaunch wpr_simulation wpb_rviz.launch顯示/Scan話題消息,后面的參數是noarr無數組,防止刷屏
rostopic echo /scan --noarr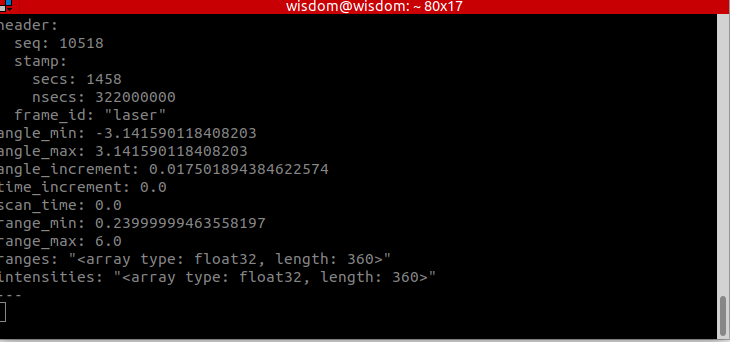
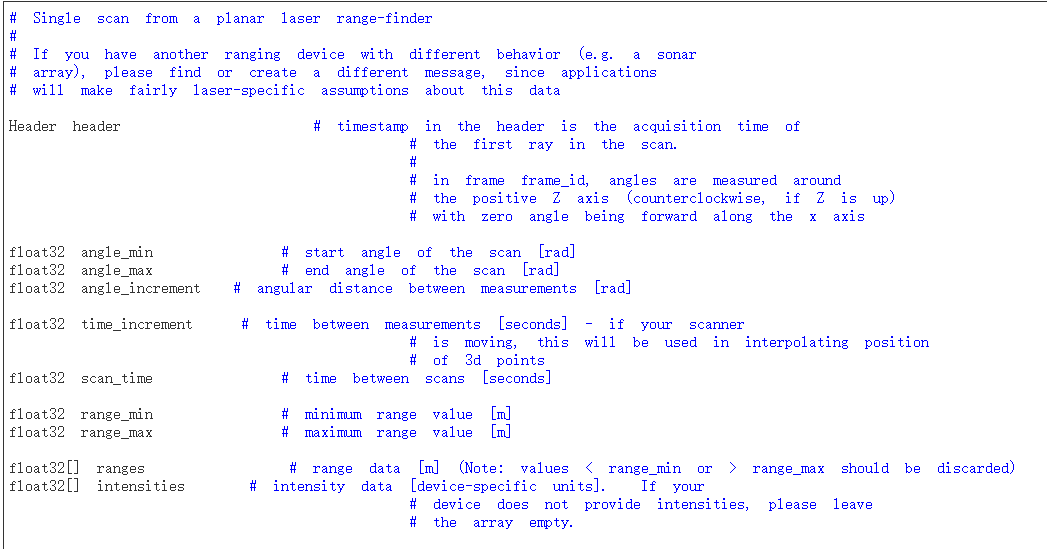
參考官方網址Ros index的文檔解釋:sensor_msgs/LaserScan Documentation (ros.org)
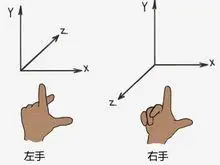
?順便補充一下右手坐標系
食指為X,中指為Y,大拇指為Z
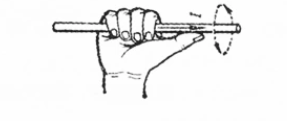
還有右手螺旋法則確定旋轉的方向
?


使用指南)
—— 資源導航與深度評測)
程序逆向篇-AD_CM#2)

——同步工具類 (Synchronizers)深度解析)
)






)
)
:對話的靈魂 - 深入理解LangChain4j中的模型、提示和解析器)


