一、3DSC(3D Shape Context)特征算法原理
1. 背景
3DSC 是一種描述三維點云局部形狀的特征描述子,受二維 Shape Context 的啟發。它用于捕捉點云某一點局部的幾何分布信息,對點云配準、識別等任務非常有效。
2. 基本思想
3DSC 描述子通過統計某個關鍵點周圍點云在空間中分布的統計直方圖,編碼該關鍵點的局部結構信息。它的核心是將關鍵點附近的鄰域點投影到球坐標系統中,然后統計這些點在球坐標的不同區域內的分布。
3. 具體原理步驟
-
關鍵點選擇
3DSC一般計算在關鍵點上(比如角點、邊緣點)【關鍵點提取算法會在后面章節進行講解說明】,提高效率和魯棒性。 -
鄰域定義
對關鍵點以一定半徑定義鄰域(radius),找到鄰域內的所有點。 -
局部坐標系建立
建立關鍵點局部參考坐標系,通常利用該點的法線方向定義z軸,通過構造局部坐標系保證描述子具有旋轉不變性。 -
球坐標系劃分
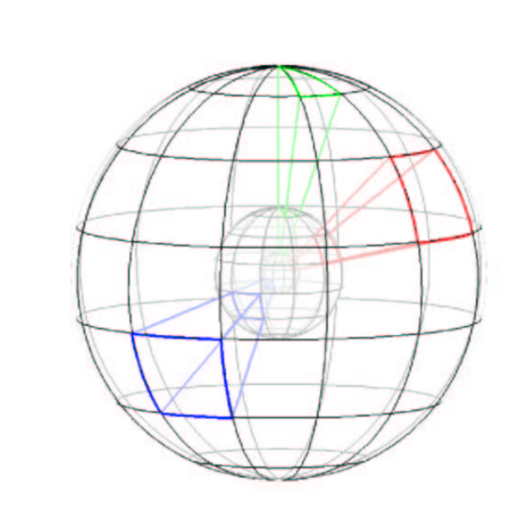
在局部坐標系中,以關鍵點為球心,將鄰域空間劃分成若干個體素(bins),通常按半徑(r)、極角(θ)、方位角(φ)劃分為3個維度的離散格子,如下圖所示。
-
統計鄰域點分布
計算鄰域中點在每個球體素內的點數,統計形成一個三維直方圖。 -
歸一化
對直方圖進行歸一化,得到局部幾何結構的概率分布,作為特征描述子。 -
特征匹配
計算兩個3DSC描述子之間的距離(例如χ2距離、Hellinger距離等)完成匹配。
4. 3DSC特點
- 保持對旋轉和尺度的魯棒性(通過局部坐標系和歸一化處理)
- 能夠有效捕捉局部三維結構信息
- 特征維度較高(通常上千維),計算和存儲較大,適合關鍵點描述
二、主要成員函數和變量
1、成員變量詳解
| 變量名 | 類型 | 說明 |
|---|---|---|
azimuth_bins_ | std::size_t | 方位角方向劃分的 bin 數(默認 12) |
elevation_bins_ | std::size_t | 仰角方向劃分的 bin 數(默認 11) |
radius_bins_ | std::size_t | 半徑方向劃分的 bin 數(默認 15) |
min_radius_ | double | 最小半徑,表示從點開始計算特征時的起始距離(默認 0.1) |
point_density_radius_ | double | 用于計算點密度的搜索半徑(默認 0.2) |
radii_interval_ | std::vector<float> | 半徑分桶區間,用于特征球體的劃分 |
theta_divisions_ | std::vector<float> | 方位角分桶區間 |
phi_divisions_ | std::vector<float> | 仰角分桶區間 |
volume_lut_ | std::vector<float> | 每個 bin 對應的小體積 LUT(look-up table) |
descriptor_length_ | std::size_t | 每個點的描述子維度 = azimuth_bins × elevation_bins × radius_bins |
rng_ | std::mt19937 | 隨機數生成器,用于計算局部坐標系中 X 軸的選擇(不確定性) |
rng_dist_ | std::uniform_real_distribution<float> | 0~1 的均勻分布,用于上述隨機采樣 |
2、 核心成員函數講解
構造函數
ShapeContext3DEstimation(bool random = false)
- 構造函數初始化默認參數和隨機數生成器。
- 如果
random = true,則使用當前時間作為種子,否則使用固定值 12345。
initCompute()
bool initCompute () override;
-
初始化函數:
- 計算并填充
radii_interval_,theta_divisions_,phi_divisions_ - 計算每個體素的體積并填入
volume_lut_ - 是描述子計算的前置步驟。
- 計算并填充
computePoint(...)
bool computePoint (std::size_t index, const pcl::PointCloud<PointNT>& normals, float rf[9], std::vector<float>& desc);
-
對單個點進行特征計算。
-
輸入:
- 點的索引
- 法線集合
- 點的局部參考坐標系
rf[9]
-
輸出:
- 描述子
desc(長度為 descriptor_length_)
- 描述子
computeFeature(...)
void computeFeature (PointCloudOut &output) override;
- 繼承自
Feature<PointInT, PointOutT>的虛函數。 - 用于計算整云的 3DSC 特征。
- 遍歷所有索引點,調用
computePoint()逐個生成描述子。
setMinimalRadius() / getMinimalRadius()
void setMinimalRadius(double radius);
double getMinimalRadius();
- 設置 / 獲取最小半徑 rmin(決定特征球從哪里開始采樣)
setPointDensityRadius() / getPointDensityRadius()
void setPointDensityRadius(double radius);
double getPointDensityRadius();
- 設置 / 獲取計算點密度時的搜索半徑。
getAzimuthBins(), getElevationBins(), getRadiusBins()
- 獲取當前 azimuth/elevation/radius 的 bin 數量。
rnd()
inline float rnd() { return rng_dist_(rng_); }
- 內部隨機數生成函數(0~1 均勻分布),用于隨機選擇局部坐標軸方向。
3、 特征維度說明
描述子維度為:
descriptor_length_ = azimuth_bins_ × elevation_bins_ × radius_bins_;
默認情況下為:
12 × 11 × 15 = 1980維(對應 pcl::ShapeContext1980)
4、總結:整體流程(computeFeature)
-
初始化(
initCompute()) → 構建球形體素劃分 -
遍歷輸入點集(
computeFeature()) -
對每個點:
- 建立局部坐標系(通常由法線和隨機 X 方向構建)
- 鄰域點轉換到該局部坐標系
- 根據方位角/仰角/半徑落入 bin 中計數
- 根據 bin 的體積歸一化 → 得到直方圖
-
存入輸出點云
PointCloudOut(即每個點一個1980維向量)
三、主要實現代碼注解
1、計算單點 3D 形狀上下文描述子(Shape Context 3D Descriptor)
// 模板函數:計算指定點的 Shape Context 描述子
template <typename PointInT, typename PointNT, typename PointOutT>
bool pcl::ShapeContext3DEstimation<PointInT, PointNT, PointOutT>::computePoint (std::size_t index, // 當前計算的點在索引列表中的索引const pcl::PointCloud<PointNT> &normals, // 所有法線float rf[9], // 輸出:參考坐標系(Reference Frame,3x3 矩陣展開為數組)std::vector<float> &desc) // 輸出:形狀上下文描述子
{// rf 中的三個向量組成了局部參考系 RF:x_axis | y_axis | normalEigen::Map<Eigen::Vector3f> x_axis (rf);Eigen::Map<Eigen::Vector3f> y_axis (rf + 3);Eigen::Map<Eigen::Vector3f> normal (rf + 6);// 在指定搜索半徑內查找鄰域點pcl::Indices nn_indices;std::vector<float> nn_dists;const std::size_t neighb_cnt = searchForNeighbors ((*indices_)[index], search_radius_, nn_indices, nn_dists);if (neighb_cnt == 0){// 若無鄰居,返回 NaN 描述子和空的參考系std::fill (desc.begin (), desc.end (), std::numeric_limits<float>::quiet_NaN ());std::fill (rf, rf + 9, 0.f);return (false);}// 找到最近鄰點索引(用來獲取該點的法線)const auto minDistanceIt = std::min_element(nn_dists.begin (), nn_dists.end ());const auto minIndex = nn_indices[std::distance (nn_dists.begin (), minDistanceIt)];// 獲取當前點的位置Vector3fMapConst origin = (*input_)[(*indices_)[index]].getVector3fMap ();// 使用最近鄰的法線作為當前點的法線normal = normals[minIndex].getNormalVector3fMap ();// 初始化 x_axis 為一個隨機向量,用于之后與法線正交化x_axis[0] = rnd ();x_axis[1] = rnd ();x_axis[2] = rnd ();if (!pcl::utils::equal (normal[2], 0.0f))x_axis[2] = - (normal[0]*x_axis[0] + normal[1]*x_axis[1]) / normal[2];else if (!pcl::utils::equal (normal[1], 0.0f))x_axis[1] = - (normal[0]*x_axis[0] + normal[2]*x_axis[2]) / normal[1];else if (!pcl::utils::equal (normal[0], 0.0f))x_axis[0] = - (normal[1]*x_axis[1] + normal[2]*x_axis[2]) / normal[0];x_axis.normalize ();// 斷言 x_axis 與 normal 正交assert (pcl::utils::equal (x_axis.dot(normal), 0.0f, 1E-6f));// y_axis = normal × x_axis,構成正交參考系y_axis.matrix () = normal.cross (x_axis);// 遍歷鄰域內每個鄰居點for (std::size_t ne = 0; ne < neighb_cnt; ne++){if (pcl::utils::equal (nn_dists[ne], 0.0f))continue;// 獲取鄰居坐標Eigen::Vector3f neighbour = (*surface_)[nn_indices[ne]].getVector3fMap ();// --- 計算鄰居點的極坐標 ---float r = std::sqrt (nn_dists[ne]); // 與中心點距離// 將點投影到切平面(normal 所在平面)Eigen::Vector3f proj;pcl::geometry::project (neighbour, origin, normal, proj);proj -= origin;proj.normalize ();// phi:投影在切平面后,與 x_axis 形成的角度(0 ~ 360°)Eigen::Vector3f cross = x_axis.cross (proj);float phi = pcl::rad2deg (std::atan2 (cross.norm (), x_axis.dot (proj)));phi = cross.dot (normal) < 0.f ? (360.0f - phi) : phi;// theta:當前鄰居點與法線的夾角(0 ~ 180°)Eigen::Vector3f no = neighbour - origin;no.normalize ();float theta = normal.dot (no);theta = pcl::rad2deg (std::acos (std::min (1.0f, std::max (-1.0f, theta))));// --- 計算鄰居所在的直方圖 Bin(j,k,l) ---const auto rad_min = std::lower_bound(std::next (radii_interval_.cbegin ()), radii_interval_.cend (), r);const auto theta_min = std::lower_bound(std::next (theta_divisions_.cbegin ()), theta_divisions_.cend (), theta);const auto phi_min = std::lower_bound(std::next (phi_divisions_.cbegin ()), phi_divisions_.cend (), phi);const auto j = std::distance(radii_interval_.cbegin (), std::prev(rad_min));const auto k = std::distance(theta_divisions_.cbegin (), std::prev(theta_min));const auto l = std::distance(phi_divisions_.cbegin (), std::prev(phi_min));// --- 計算當前鄰居點的局部點密度 ---pcl::Indices neighbour_indices;std::vector<float> neighbour_distances;int point_density = searchForNeighbors (*surface_, nn_indices[ne], point_density_radius_, neighbour_indices, neighbour_distances);if (point_density == 0)continue;// 權重 w = 體素歸一化體積 LUT / 鄰域點數float w = (1.0f / static_cast<float> (point_density)) *volume_lut_[(l*elevation_bins_*radius_bins_) + (k*radius_bins_) + j];assert (w >= 0.0);if (w == std::numeric_limits<float>::infinity ())PCL_ERROR ("Shape Context Error INF!\n");if (std::isnan(w))PCL_ERROR ("Shape Context Error IND!\n");// 將權重累加到對應的直方圖 bin 中desc[(l*elevation_bins_*radius_bins_) + (k*radius_bins_) + j] += w;assert (desc[(l*elevation_bins_*radius_bins_) + (k*radius_bins_) + j] >= 0);}// 注意:Shape Context 3D 的參考系不具備重復性,因此輸出設為 0,提示用戶std::fill (rf, rf + 9, 0);return (true);
}
此函數的關鍵步驟為:
- 計算局部參考坐標系(使用最近鄰的法線,并構造 x/y 軸);
- 搜索鄰域點,并將鄰居映射到形狀上下文的三維極坐標空間;
- 根據點在 (r, θ, φ) 空間中的位置,統計加權直方圖;
- 輸出形狀上下文描述子
desc(一維向量,長度為radius_bins_ * elevation_bins_ * azimuth_bins_); - 將 RF 置零表示其不可重復。
2、計算所有點 3D 形狀上下文描述子(3DSC)
下面是你提供的 pcl::ShapeContext3DEstimation::computeFeature 函數的 逐行中文注釋版,便于理解其作用和流程。
template <typename PointInT, typename PointNT, typename PointOutT>
void pcl::ShapeContext3DEstimation<PointInT, PointNT, PointOutT>::computeFeature(PointCloudOut &output)
{// 確保描述子的長度為 1980(由半徑/角度劃分決定)assert (descriptor_length_ == 1980);// 假設輸出點云初始是 dense(沒有無效點)output.is_dense = true;// 遍歷每一個需要計算描述子的點(由 indices_ 指定)for (std::size_t point_index = 0; point_index < indices_->size(); point_index++){// 如果當前點不是有限(如有 NaN 或 Inf),填充 NaN 描述子并跳過if (!isFinite((*input_)[(*indices_)[point_index]])){// 將 descriptor 數組設置為 NaNstd::fill(output[point_index].descriptor, output[point_index].descriptor + descriptor_length_,std::numeric_limits<float>::quiet_NaN());// 將局部參考幀 rf 設置為 0(表示無效)std::fill(output[point_index].rf, output[point_index].rf + 9, 0);// 標記整個輸出點云為非 dense(包含無效點)output.is_dense = false;continue;}// 初始化當前點的描述子向量,長度為 descriptor_length_(1980)std::vector<float> descriptor(descriptor_length_);// 調用 computePoint 函數計算當前點的 3D Shape Context 描述子和局部參考幀 rf// 如果失敗(如搜索不到鄰域點),將該點視作無效點if (!computePoint(point_index, *normals_, output[point_index].rf, descriptor))output.is_dense = false;// 將計算出的 descriptor 拷貝到 output 中對應點的 descriptor 成員里std::copy(descriptor.begin(), descriptor.end(), output[point_index].descriptor);}
}
說明:
-
descriptor_length_ == 1980是由 Shape Context 直方圖的劃分決定的:
通常為:radius_bins × elevation_bins × azimuth_bins,如5 × 6 × 66 = 1980。 -
rf是局部參考幀(Local Reference Frame),由三個正交軸組成(x, y, normal),用于保證描述子的方向不變性。 -
如果點本身是無效的,或在
computePoint()中無法找到有效鄰域點,會將該點描述子設置為 NaN。 -
output.is_dense是一個標志位,表示結果是否全部為有效點(無 NaN)。
四、使用代碼示例
/*****************************************************************//**
* \file PCLFeature3DSCmain.cpp
* \brief
*
* \author YZS
* \date Jun 2025
*********************************************************************/#include <iostream>#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/3dsc.h>
#include <pcl/search/kdtree.h>int PCL3DSC(int argc, char** argv)
{// 加載點云std::string fileName = "E:/PCLlearnData/18/fragment.pcd";pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());if (pcl::io::loadPCDFile<pcl::PointXYZ>(fileName, *cloud) == -1){std::cerr << "無法讀取點云文件"<< fileName << std::endl;return -1;}std::cout << "點云加載成功,點數: " << cloud->size() << std::endl;// 計算法線pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>());pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;ne.setInputCloud(cloud);pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());ne.setSearchMethod(tree);ne.setRadiusSearch(0.05); // 法線估計半徑ne.compute(*normals);std::cout << "法線估計完成。" << std::endl;// 創建ShapeContext3D特征估計器pcl::ShapeContext3DEstimation<pcl::PointXYZ, pcl::Normal, pcl::ShapeContext1980> sc3d;sc3d.setInputCloud(cloud); // 輸入點云sc3d.setInputNormals(normals); // 輸入法線sc3d.setSearchMethod(tree);sc3d.setRadiusSearch(0.2); // 特征提取的球形鄰域半徑// 輸出描述子pcl::PointCloud<pcl::ShapeContext1980>::Ptr descriptors(new pcl::PointCloud<pcl::ShapeContext1980>());sc3d.compute(*descriptors);std::cout << "3DSC特征計算完成,特征維度: " << pcl::ShapeContext1980::descriptorSize() << std::endl;std::cout << "輸出特征個數: " << descriptors->size() << std::endl;// 打印前3個點的描述子片段for (size_t i = 0; i < std::min<size_t>(3, descriptors->size()); ++i){std::cout << "點 " << i << " 描述子 (前50維): ";for (int j = 0; j < 50; ++j)std::cout << descriptors->points[i].descriptor[j] << " ";std::cout << std::endl;}return 0;
}int main(int argc, char* argv[])
{PCL3DSC(argc, argv);std::cout << "Hello World!" << std::endl;std::system("pause");return 0;
}
結果展示:
至此完成第十八節PCL庫點云特征之3DSC特征描述,下一節我們將進入《PCL庫中點云特征之GASD(Globally Aligned Spatial Distribution )特征描述》的學習,歡迎喜歡的朋友訂閱。


”)













Assimp(Open Asset Import Library))
-第一周part2 人工智能術語人工智能公司應該怎么做)
)
